Alle Kategorien
-
Integrierte schaltkreise (ICS)
Integrierte schaltkreise (ICS)
- Schnittstelle - Sensor, kapazitive Berührung(642)
- Spezialisierte ICS(12302)
- PMIC-Spannungsregler-besonderer Zweck(5644)
- PMIC-Spannungsregler-lineare Regler(793)
- PMIC-Spannungsregler-linear + Switching(1829)
- PMIC-Spannungsregler-linear(70981)
- PMIC-Spannungsregler-DC DC Switching Regulators(39569)
- PMIC-Regler-DC-DC-Switching-Controller(13507)
- PMIC-Spannungs-Referenz(9453)
- PMIC-v/f und f/v-Wandler(145)
- PMIC-Thermal Management(592)
- PMIC-Supervisor(47946)
- PMIC-RMS bis DC-Wandler(170)
- PMIC-Netzteil-Controller, Monitore(2104)
- PMIC-Power over Ethernet (PoE) Controller(1008)
- PMIC-Power Management-spezialisierte(7722)
- PMIC-Netzschalter, Treiber laden(7706)
- PMIC-PFC (Power Factor Correction)(1222)
- PMIC oder Steuerungen, ideale Dioden(705)
- PMIC-Motor-Treiber, Regler(4712)
- PMIC-Beleuchtung, Ballast-Regler(560)
- PMIC-LED-Treiber(7282)
- PMIC-Laser-Treiber(573)
- PMIC-Hot-Swap-Controller(2816)
- PMIC-Gate-Treiber(7083)
- PMIC-voll, Half-Bridge-Treiber(1342)
- PMIC-Energy Messung(654)
- PMIC-Display-Treiber(1435)
- PMIC-derzeitige Regulierung/Management(1481)
- PMIC-Batterie-Management(5553)
- PMIC-Ladegeräte(3831)
- PMIC-AC DC Konverter, Offline Schalter(4905)
- Memory-Controller(358)
- Memory-Konfigurations-Proms für FPGAs(639)
- Speicher-Akkus(13)
- Erinnerung(65694)
- Logic-universelle Bus-Funktionen(706)
- Logic-Übersetzer, Level-Shifter(2854)
- Logik-Specialty Logic(1870)
- Logik-Signal-Schalter, Multiplexer, Decoder(9420)
- Logic-Shift-Register(2665)
- Logic-Parity Generatoren und Checkers(335)
- Logic-multivibratoren(831)
- Logik-Latches(3658)
- Logik - Tore und Wechselrichter - Multifunktion, konfigurierbar(1687)
- Logik-Tore und Wechselrichter(16453)
- Logic-Flip Flops(7780)
- Logik-FIFOs Speicher(4240)
- Logik-Zähler, Trennlinien(3456)
- Logik-Vergleichsoperator(592)
- Logik-Puffer, Treiber, Receiver, Transceiver(17835)
- Linear-Video-Verarbeitung(2909)
- Linear-Vergleichsoperator(5084)
- Linear-analoge Multiplikatoren, Trennwände(263)
- Linear-Verstärker-Video Amps und Module(1905)
- Linear-Verstärker-Spezial-Zweck(1856)
- Linear - Verstärker - Instrumentierung, OP -Verstärker, Pufferverstärker(34236)
- Linear-Verstärker-Audio(4567)
- Interface-Voice Record und Playback(556)
- Schnittstelle - UARTs (Universal Asynchronous Receivers -Sender)(1237)
- Schnittstelle-Telecom(4467)
- Interface-spezialisierte(4833)
- Interface-Signal Terminatoren(333)
- Interface-Signal-Puffer, Repeater, Splitter(1449)
- Interface-Serializer, Deserializer(1480)
- Schnittstellen-Sensor und Detektor-Interfaces(1524)
- Interface-Module(169)
- Interface-Modems-ICS und Module(407)
- Interface-e/a-Expander(1136)
- Interface-Filter-aktiv(1226)
- Interface-Encoder, Decoder, Konverter(714)
- Interface-Treiber, Receiver, Transceiver(20755)
- Interface-Direct Digital Synthesis (DDS)(117)
- Interface-Controller(3628)
- Interface-Codecs(1676)
- Schnittstelle - Analoge Switches, Multiplexer, Demultiplexer(12567)
- Schnittstelle-analoge Schalter-spezieller Zweck(2533)
- Embedded-System on Chip (SoC)(4496)
- Embedded-PLDs (programmierbare Logik-Vorrichtung)(971)
- Embedded-Mikroprozessoren(10083)
- Embedded-Mikrocontroller-anwendungsspezifische(2275)
- Embedded-Mikrocontroller(99285)
- Eingebettet - Mikrocontroller, Mikroprozessor, FPGA -Module(1527)
- Eingebettet - FPGAs (Feldprogrammiergate -Array) mit Mikrocontrollern(81)
- Embedded-FPGAs (Field Programmable Gate Array)(27747)
- Embedded-DSP (Digital Signal Processors)(4081)
- Eingebettet - CPLDs (komplexe programmierbare Logikgeräte)(5187)
- Datenerfassung-Touch Screen Controller(1210)
- Datenerfassung-Digital to Analog Converter (DAC)(14419)
- Datenerfassung-digitale Potentiometer(6250)
- Datenerfassung-analog zu Digital Converters (ADC)(17776)
- Datenerfassung-analoges Frontend (AFE)(787)
- Datenerfassung-MDE/DACs-spezieller Zweck(3043)
- Clock/Timing-Uhren in Echtzeit(2446)
- Uhr/Timing - programmierbare Timer und Oszillatoren(23469)
- Clock/Timing-IC-Akkus(4)
- Takt/Timing-Delay Lines(1049)
- Uhr/Timing - Uhrengeneratoren, PLLS, Frequenzsynthesizer(32775)
- Clock/Timing-Clock Puffer, Treiber(4568)
- Clock/Timing-anwendungsspezifische(8652)
- Audio Spezial-Zweck(1564)
Relevanter Hersteller







-
Diskrete Halbleiter-Produkte
Diskrete Halbleiter-Produkte
- Aktuelle Regulierung - Dioden, Transistoren(1090)
- Transistoren-besonderer Zweck(226)
- Transistoren-programmierbare Unijunction(48)
- Transistoren-jfets(1558)
- Transistoren-IGBTs-Einzel(4799)
- Transistoren-IGBTs-Module(63420)
- Transistoren-IGBTs-Arrays(26)
- Transistoren-FETs, MOSFETs-Einzel(48330)
- Transistoren-FETs, MOSFETs-RF(4903)
- Transistoren-FETs, MOSFETs-Arrays(6641)
- Transistoren-Bipolar (BJT)-einzeln, Pre-biased(4539)
- Transistoren-Bipolar (BJT)-Einzel(25800)
- Transistoren-Bipolar (BJT)-RF(2087)
- Transistoren-bipolare (BJT)-Arrays, Pre-biased(2115)
- Transistoren-bipolare (BJT)-Arrays(2310)
- Thyristor-triacs(4044)
- Thyristoren-SCRs-Module(3967)
- Thyristoren-SCRs(5436)
- Thyristoren-diacs, sidacs(319)
- Power Driver Module(1627)
- Dioden-zenerdioden-Einzel(87483)
- Dioden-zenerdioden-Arrays(2619)
- Dioden - variable Kapazität (Varik, Varaktoren)(1200)
- Dioden-RF(2753)
- Dioden-Gleichrichter-Einzel(67528)
- Dioden-Gleichrichter-Arrays(20581)
- Dioden-Brücke-Gleichrichter(11700)
Relevanter Hersteller




-
RF/if und RFID
RF/if und RFID
- SIM -Karten für Abonnenten -Identifikationsmodul (SIM)(77)
- RF -Zirkulatoren und Isolatoren(1742)
- RFID, RF-Zugang, Monitoring-ICS(1550)
- RFID Transponder, Tags(747)
- RFID Lesegeräte(464)
- RFID -Bewertungs- und Entwicklungskits, Boards(30)
- RFID Antennen(329)
- RFI und EMI - Abschirm- und Absorbungsmaterialien(6444)
- HF und EMI-Kontakte, Fingerstock und Dichtungen(7497)
- RF Transmitter(668)
- RF Transceiver Module(6900)
- RF-Transceiver ICS(4169)
- HF-Schalter(9276)
- RF Shields(16401)
- HF-Receiver(1998)
- HF -Empfänger, Sender und Transceiver -Einheiten(2763)
- RF Power Divider/Splitter(1223)
- RF Power Controller ICs(86)
- HF-Modulatoren(710)
- HF-Mixer(2800)
- RF misc ICS und Module(3276)
- HF-Front-End (LNA + PA)(419)
- RF -Bewertungs- und Entwicklungskits, Boards(747)
- HF-gerichtete Kupplung(2718)
- RF Diplexer(1464)
- RF-Detektoren(412)
- RF-Demodulatoren(249)
- HF-Antennen(12319)
- HF-Verstärker(19651)
- Balun(1496)
- Dämpfungsglieder(4852)
Relevanter Hersteller







-
Optoelektronik
Optoelektronik
- Optomechanisch(480)
- Leuchten(125)
- Laserdioden, Lasermodule - Laserlieferung, Laserfasern(345)
- Hene Lasersysteme(31)
- Hene Laserköpfe(27)
- Hintergrundbeleuchtung anzeigen(93)
- Xenon-Beleuchtung(387)
- Touchscreen-Overlays(453)
- Panel Indicators, Pilot Lights(75729)
- Optik-Remote-Phosphor-Lichtquelle(269)
- Optik-Reflektoren(665)
- Optik-leichte Rohre(5384)
- Optik-Objektive(4951)
- LEDs-Spacer, Unentschieden(2718)
- LEDs-Lamp-Ersetzungen(29718)
- LEDs - Leiterplattenindikatoren, Arrays, Lichtstäbe, Balkendiagramme(9083)
- LED-thermische Produkte(667)
- LED-Beleuchtung(64)
- LED-Beleuchtung-weiß(37580)
- LED-Beleuchtung-Farbe(4728)
- LED-Beleuchtung-Maiskolben, Motoren, Module(28735)
- LED-Anzeige-diskret(27601)
- Laserdioden, Module(1553)
- Lampen-Glühlampen, Neons(311004)
- Lampen-Kälte-Fluoreszenz (KKL) & UV(164)
- Wechselrichter(7728)
- Infrarot, UV, sichtbare Strahler(3871)
- Fiber Optics-Transmitter-Antrieb integriert(4085)
- Fiber Optics-Transmitter-diskrete(350)
- Fiber Optics-Transceiver Module(18758)
- Fiberoptik-Switches, Multiplexer, Demultiplexer(1387)
- Fiberoptik-Receiver(695)
- Fiberoptik-Dämpfung(654)
- Elektrolumineszenz(102)
- Display, Monitor-Interface Controller(98)
- Display-Module-Vakuum-Leuchtstofflampen (VFD)(249)
- Module anzeigen-LED Dot Matrix und Cluster(865)
- Display-Module-LED-Zeichen und numerische(5421)
- Display-Module-LCD, OLED, Graphic(4654)
- Display-Module-LCD, OLED-Zeichen und numerische(2202)
- Display-Blenden, Objektive(88)
- Adresse, Spezialität(458)
Relevanter Hersteller







-
Sensoren, Wandler
Sensoren, Wandler
- Ultraschallempfänger, Sender - Industrial(115)
- Temperatursensoren - Thermostate - Mechanisch - Industrielles(3103)
- Temperatursensoren - Analog und digitaler Ausgang - Industrial(209)
- Näherungssensoren - Industrial(13611)
- Drucksensoren, Wandler - Industrie(26503)
- Optische Sensoren - Photonik - Zähler, Detektoren, SPCM (Einzelphotonzählmodul)(751)
- Optische Sensoren - Kameramodule(875)
- Magnetsensoren - Position, Nähe, Geschwindigkeit (Module) - Industrie(554)
- Kraftsensoren - Industrial(346)
- Flusssensoren - Industrielles(151)
- Float, Level Sensoren - Industrial(310)
- Encoder - Industrial(4980)
- Farbsensoren - Industrial(50)
- Berührungssensoren(100)
- Ultraschall-Receiver, Transmitter(2421)
- Temperatursensoren-Thermostat-Solid State(1096)
- Temperatursensoren-Thermostate-mechanisch(3397)
- Temperatursensoren - Thermoelemente, Temperatursonden(1921)
- Temperatursensoren - RTD (Widerstandstemperaturdetektor)(1525)
- Temperatursensoren-PTC-Thermistoren(2273)
- Temperatursensoren-ntc-thermistoren(13259)
- Temperatursensoren-Analog und Digital Output(3928)
- DMS(1399)
- Spezialisierte Sensoren(1861)
- Solarzellen(503)
- Schock-Sensoren(84)
- Sensor-Interface-Junction-Blöcke(2519)
- Sensor-Kabel-Baugruppen(22011)
- Proximity/Belegung Sensoren-fertige Einheiten(725)
- Näherungsschalter(2860)
- Drucksensoren, Wandler(11317)
- Positionssensoren - Winkel, lineare Positionsmessung(6022)
- Optische Sensoren-reflektierende-Logik-Ausgang(194)
- Optische Sensoren - reflektierend - analoge Ausgang(432)
- Optische Sensoren-Phototransistoren(1027)
- Optische Sensoren - Photointerrupter - Schlitztyp - Transistorausgang(1427)
- Optische Sensoren - Photointerrupter - Schlitztyp - Logikausgabe(1215)
- Optische Sensoren-Lichtschranke, Industrial(16763)
- Optische Sensoren-Photodioden(1543)
- Optische Sensoren-Foto-Detektoren-Remote Receiver(2605)
- Optische Sensoren-Foto-Detektoren-Logik-Ausgang(146)
- Optische Sensoren-Foto-Detektoren-CDs-Zellen(74)
- Optische Sensoren-Distanz-Messung(377)
- Optische Sensoren-Ambient Light, IR, UV Sensoren(1305)
- Multifunktions(558)
- Motion Sensors-Vibration(337)
- Motion Sensors-Tilt Schalter(67)
- Bewegungsmelder-optisch(719)
- Motion Sensors-Neigungssensoren(175)
- Motion Sensors-Imus (Trägheit-Maßeinheiten)(416)
- Motion Sensors-Kreisel(214)
- Motion Sensors-Beschleunigungsmesser(1911)
- Magnete-Sensor abgestimmt(119)
- Magnete-Multi Purpose(1965)
- Magnetische Sensoren-Schalter (Solid State)(3700)
- Magnetsensoren - Position, Nähe, Geschwindigkeit (Module)(5199)
- Magnetische Sensoren-linear, Kompass (ICS)(1247)
- Magnetsensoren - Kompass, Magnetfeld (Module)(35)
- LVDT -Wandler (linearer variabler Differentialtransformator)(204)
- IrDA Transceiver-Module(196)
- Bildsensor, Kamera(2235)
- Feuchtigkeit-Sensoren(1425)
- Gas-Sensoren(1217)
- Force Sensoren(188)
- Durchfluss-Sensoren(550)
- Float, Level Sensoren(1343)
- Encoder(6357)
- Staub-Sensoren(43)
- Aktuelle Wandler(3455)
- Color Sensoren(85)
- Verstärker(1905)
Relevanter Hersteller







-
Anschlüsse, Verbindungen
Anschlüsse, Verbindungen
- USB, DVI, HDMI -Stecker(446)
- Festkörperbeleuchtungsstecker(555)
- Steckdosen für ICs, Transistoren(953)
- Steckbare Steckverbinder(1221)
- Photovoltaik (Solarpanel) Anschlüsse(136)
- Glasfaseranschlüsse(370)
- FFC, FPC (flache flexible) Anschlüsse(761)
- D-Sub, D-förmige Stecker(2887)
- Koaxialverbinder (RF)(2389)
- Rundanschlüsse(14162)
- Stromanbeter Blade Type(273)
- Stecker und Behälter(2597)
- USB, DVI, HDMI Stecker-Adapter(572)
- USB, DVI, HDMI -Stecker(4298)
- Klemmen-Wire to Board Steckverbinder(217)
- Klemmen-Draht-Steckverbinder(4322)
- Klemmen-Draht-Pin Stecker(328)
- Terminals-Revolver Steckverbinder(1273)
- Terminals-spezialisierte Steckverbinder(2042)
- Klemmen-Spaten Verbinder(3902)
- Klemmen-Löten/Stecker(345)
- Klemmen-Verschraubungen(745)
- Klemmen-Ring Steckverbinder(12596)
- Klemmen-rechteckige Steckverbinder(4747)
- Terminals - Schnellverbindungen, schnelle Trennungsanschlüsse(8514)
- Klemmen-PC PIN, Single Post Connectors(3776)
- Klemmen-PC-Pin-Buchsen, Sockel-Steckverbinder(5883)
- Klemmen-magnetische Draht-Steckverbinder(1653)
- Klemmen-Messer Steckverbinder(112)
- Klemmen-Gehäuse, Stiefel(2850)
- Klemmen-Folie Steckverbinder(108)
- Klemmen-Barrel, Bullet-Steckverbinder(1107)
- Klemmen-Adapter(137)
- Terminal-Streifen und Revolver-Boards(1159)
- Terminal Junction Systeme(2533)
- Anschlussblöcke-Draht an Bord(43615)
- Terminal Blocks-spezialisierte(3722)
- Terminal Blocks-Power Distribution(847)
- Anschlussblöcke-Panel Mount(1359)
- Terminal Blocks-Interface Module(1819)
- Anschlussblöcke-Kopfzeilen, Stecker und Buchsen(119920)
- Anschlussblöcke-DIN-Schiene, Kanal(9373)
- Anschlussblöcke-Kontakte(65)
- Anschlussblöcke-Barrier Blocks(47517)
- Anschlussblöcke-Adapter(1059)
- Solid State Lighting Verbinder-Kontakte(271)
- Festkörperbeleuchtungsstecker(1344)
- Buchsen für ICS, Transistoren-Adapter(275)
- Steckdosen für ICs, Transistoren(22148)
- Shunts, Jumper(907)
- Rechteckige Verbinder-Feder geladen(7721)
- Rechteckige Steckverbinder-Gehäuse(43023)
- Rechteckige Verbinder-Kopfzeilen, Spezial-PIN(6129)
- Rechteckige Anschlüsse - Header, Gefäße, weibliche Sockel(229601)
- Rechteckige Verbinder-Kopfzeilen, männliche Pins(543338)
- Rechteckige Anschlüsse - kostenloses Hängen, Panelhalterung(30142)
- Rechteckige Verbinder-Kontakte(10681)
- Rechteckige Anschlüsse - Board in, Direktdraht zum Board(2432)
- Rechteckige Verbinder-Adapter(475)
- Rechteckig - Brett zu Board -Steckern - Header, Behälter, weibliche Sockel(9)
- Rechteckig - Brett zu Board -Steckern - Header, männliche Stifte(2)
- Rechteckige Anschlüsse - Board -Abstandshalter, Stacker (Board zu Board)(238901)
- Rechteckige Anschlüsse - Arrays, Kantentyp, Mezzanin (Board zu Board)(37853)
- Stromanschluss-Eingänge, Steckdosen, Module(10310)
- Steckbare Steckverbinder(6049)
- Photovoltaik- (Solarpanel) Anschlüsse - Kontakte(77)
- Photovoltaik (Solarpanel) Anschlüsse(504)
- Modulare Steckverbinder-Verdrahtung Blöcke(99)
- Modulare Steckverbinder-Stecker(1674)
- Modulare Steckverbinder-Stecker Gehäuse(181)
- Modulare Steckverbinder-Buchsen mit magnetischen(10152)
- Modulare Steckverbinder-Buchsen(23416)
- Modulare Steckverbinder-Adapter(855)
- Memory Connectors-PC Cards-Adapter(21)
- Memory Connectors-PC Card Sockets(3299)
- Memory Connectors-Inline Modul Sockets(3390)
- LGH Steckverbinder(764)
- Keystone-Einsätze(2758)
- Keystone-Frontplatte, Frames(1926)
- Heavy Duty Steckverbinder-Einsätze, Module(4190)
- Schwerlastanschlüsse - Gehäuse, Kapuzen, Basen(17226)
- Heavy Duty Steckverbinder-Frames(523)
- Heavy Duty Steckverbinder-Kontakte(1832)
- Heavy Duty Steckverbinder-Baugruppen(671)
- LWL-Steckverbinder-Gehäuse(919)
- Glasfaser-Steckverbinder - Adapter(4455)
- LWL-Steckverbinder(3001)
- FFC, FPC (flache flexible) Steckverbinder - Gehäuse(652)
- FFC, FPC (flache flexible) Anschlüsse - Kontakte(202)
- FFC, FPC (flache flexible) Anschlüsse(18691)
- D-Sub, d-förmige Steckverbinder-Terminatoren(47)
- D-Sub, d-förmige Steckverbinder-Gehäuse(12238)
- D-Sub, d-förmige Steckverbinder-Kontakte(2714)
- D-Sub, D-förmige Steckverbinder-Rückenschalen, Kapuzen(5995)
- D-Sub, d-förmige Steckverbinder-Adapter(1304)
- D-Sub Steckverbinder(141346)
- D-förmige Steckverbinder-Centronics(8770)
- Kontakte, Frühling geladen und Druck(630)
- Kontakte-Multi Purpose(6196)
- Kontakte-"Leadframe"(122)
- Koaxial-Steckverbinder (RF)-Terminatoren(1231)
- Koaxial-Steckverbinder (RF)-Kontakte(480)
- Koaxial-Steckverbinder (RF)-Adapter(6386)
- Koaxialverbinder (RF)(25734)
- Rundsteckverbinder-Gehäuse(441226)
- Rundsteckverbinder-Kontakte(4737)
- Rundsteckverbinder-backschalen und Kabel-Klemmen(53692)
- Rundsteckverbinder-Adapter(8839)
- Rundanschlüsse(1196254)
- Card Edge Steckverbinder-Gehäuse(469)
- Karte Edge Verbinder-edgeboard Verbinder(672683)
- Card Edge Verbinder-Kontakte(325)
- Card Edge Verbinder-Adapter(73)
- Blade Type Power Steckverbinder-Gehäuse(837)
- Blade Type Power Connectors-Kontakte(393)
- Stromanbeter Blade Type(4163)
- Zwischen Serien-Adapter(649)
- Barrel-Stromanschluss(935)
- Barrel-Audio-Anschlüsse(2432)
- Barrel-Audio Adapter(92)
- Banana und Tip Steckverbinder-Buchsen, Stecker(1644)
- Banana and Tip Connectors-Binding Posts(239)
- Banana und Tip Steckverbinder-Adapter(75)
- Backplane Steckverbinder-spezialisiert(45586)
- Backplane Steckverbinder-Gehäuse(6863)
- Backplane Steckverbinder-Hard metrisch, Standard(6297)
- Backplane Steckverbinder-DIN 41612(9408)
- Backplane Steckverbinder-Kontakte(3583)
- Backplane Connectors-ARINC Einsätze(2357)
- Backplane Steckverbinder-ARINC(3789)
Relevanter Hersteller







-
Widerstände
-
Kondensatoren
Kondensatoren
- Aluminium-Elektrolytkondensatoren(16817)
- Trimmer, Variable Kondensatoren(3151)
- Dünne Folien-Kondensatoren(3473)
- Tantal-Kondensatoren(136103)
- Tantal-Polymer-Kondensatoren(9778)
- Silizium-Kondensatoren(320)
- Niob Oxide Kondensatoren(330)
- Mica und PTFE Kondensatoren(9101)
- Folien-Kondensatoren(150406)
- Elektrische Doppelschichtkondensatoren (EDLC), Superkondensatoren(2782)
- Keramische Kondensatoren(833829)
- Kondensatoren-Netzwerke, Arrays(2383)
- Aluminium-Elektrolytkondensatoren(125325)
- Aluminium-Polymer-Kondensatoren(7544)
Relevanter Hersteller






-
Transformatoren
Transformatoren
Relevanter Hersteller







-
Isolatoren
-
Kristalle, Oszillatoren, Resonatoren
Kristalle, Oszillatoren, Resonatoren
Relevanter Hersteller






-
Switches
Switches
- Verriegelungsschalter(2893)
- Emergency-Stop-Schalter (E-Stop)(1160)
- Kabelzugschalter(571)
- Toggle-Schalter(33608)
- Rändelrads Schalter(742)
- Schalter(14263)
- Snap-Aktion, Endschalter begrenzen(28077)
- Slide-Schalter(5166)
- Selector-Schalter(9720)
- Rotary Switches(13850)
- Rocker Schalter(53790)
- Drucktaste-Schalter-Hall-Effekt(127)
- Drucktaste Schalter(190826)
- Programmierbare Display-Switches(39)
- Navigations-Schalter, Joystick(1882)
- Magnetische, Reed-Schalter(1399)
- Keypad-Schalter(637)
- Keylock Schalter(3684)
- DIP Schalter(7747)
- Konfigurierbare Switch-Komponenten-Objektiv(1435)
- Konfigurierbare Schalter-Komponenten-Lichtquelle(1236)
- Konfigurierbare Switch-Komponenten-Contact Block(1401)
- Konfigurierbare Switch-Komponenten-Body(16077)
- Disconnect-Switch-Komponenten(2567)
Relevanter Hersteller






-
Relais
Relais
- Sicherheitsrelais(1310)
- Reedrelais(1735)
- Hochfrequenz (RF) -Relais(1190)
- Schütze (Festkörper)(686)
- Schütze (elektromechanisch)(11952)
- Kfz-Relais(1881)
- Solid State Relais(10652)
- Signal-Relais, bis zu 2 Ampere(9149)
- Relay-Sockets(2075)
- Power Relays, über 2 Ampere(31604)
- E / A-Relaismodule(712)
- I/o-Relay-Module-Input(2)
- I/o-Relay-Modul-Racks(247)
Relevanter Hersteller
















Sprache auswählen
Aktuelle Sprache
Deutsch
- English
- Deutsch
- Italia
- Français
- 日本語
- 한국의
- русский
- Svenska
- Nederland
- español
- Português
- polski
- Suomi
- Gaeilge
- Slovenská
- Slovenija
- Čeština
- Melayu
- Magyarország
- Hrvatska
- Dansk
- românesc
- Indonesia
- Ελλάδα
- Български език
- Afrikaans
- IsiXhosa
- isiZulu
- lietuvių
- Maori
- Kongeriket
- Монголулс
- O'zbek
- Tiếng Việt
- हिंदी
- اردو
- Kurdî
- Català
- Bosna
- Euskera
- العربية
- فارسی
- Corsa
- Chicheŵa
- עִבְרִית
- Latviešu
- Hausa
- Беларусь
- አማርኛ
- Republika e Shqipërisë
- Eesti Vabariik
- íslenska
- မြန်မာ
- Македонски
- Lëtzebuergesch
- საქართველო
- Cambodia
- Pilipino
- Azərbaycan
- ພາສາລາວ
- বাংলা ভাষার
- پښتو
- malaɡasʲ
- Кыргыз тили
- Ayiti
- Қазақша
- Samoa
- සිංහල
- ภาษาไทย
- Україна
- Kiswahili
- Cрпски
- Galego
- नेपाली
- Sesotho
- Тоҷикӣ
- Türk dili
- ગુજરાતી
- ಕನ್ನಡkannaḍa
- मराठी
Wie man Gleichstrommotoren mit dem L293D Motorsteuer-IC steuert
Zeit: 2026/06/9
Durchsuchen: 78
Die Steuerung eines Motors mit einem Mikrocontroller ist nicht so einfach wie die direkte Verbindung mit einem Ausgangspin. Die meisten Mikrocontroller können nicht genügend Strom bereitstellen, um Motoren sicher zu betreiben, und der Versuch, dies zu tun, kann den Schaltkreis beschädigen. Der L293D ist einer der am häufigsten verwendeten Motorsteuer-ICs in dieser Situation. In diesem Artikel werden Sie erfahren, was der L293D ist, wie er intern funktioniert, seine wichtigsten Spezifikationen, Pin-Funktionen, den Arduino-Schnittstellenprozess und mehr.
Katalog
L293D dualer H-Brücken-Motorsteuerer-IC
Der L293D ist ein dualer H-Brücken-Motorsteuer-IC, der entwickelt wurde, um es leistungsarmen Mikrocontrollern und Logikschaltungen zu ermöglichen, höhere Stromlasten zu steuern. Er dient als Schnittstelle zwischen der Steuerungsschaltung und der Last und ermöglicht zuverlässiges Schalten, während das Risiko verringert wird, empfindliche Logikkomponenten zu beschädigen. Das Gerät unterstützt standardmäßige DTL- und TTL-Logikpegel, wodurch es mit vielen beliebten Mikrocontrollern und eingebetteten Systemen kompatibel ist.
Der IC enthält vier Treiberkanäle, die als zwei H-Brücken konfiguriert werden können und somit die unabhängige Steuerung von zwei Gleichstrommotoren oder einem bipolaren Schrittmotor ermöglichen. Er unterstützt die Motorversorgungs-Spannungen bis zu 36 V, kontinuierliche Ausgangsströme von bis zu 600 mA pro Kanal und Schaltfrequenzen von bis zu 5 kHz. Der L293D ist in einem kompakten 16-Pin-Gehäuse erhältlich und bleibt eine beliebte Wahl für Motorsteuerung, Prototypenentwicklung und Bildungsprojekte.
Wichtige Merkmale und Spezifikationen
| Kategorie |
Parameter |
Spezifikation |
| Allgemein |
Gerätetyp |
Quadruple Halbleiter-Treiber / Dual H-Brücken-Motorsteuer-IC |
| Logik-Kompatibilität |
DTL und TTL kompatibel |
|
| Anzahl der Kanäle |
4 Treiberkanäle |
|
| Anzahl der H-Brücken |
2 |
|
| Maximale Schaltfrequenz |
5 kHz |
|
| Merkmale |
Aktivierungssteuerung |
Ja |
| Übertemperaturschutz |
Ja |
|
| Interne Clamp-Dioden |
Ja |
|
| Hohe Störfestigkeit |
Logik "0" Eingangsspannung bis zu 1,5 V |
|
| Elektrisch |
Motorversorgungs-Spannung (Vs) |
36 V Max |
| Logikversorgungs-Spannung (Vss) |
36 V Max |
|
| Eingangsspannung (Vi) |
7 V Max |
|
| Aktivierungsspannung (Ven) |
7 V Max |
|
| Kontinuierlicher Ausgangsstrom |
600 mA pro Kanal |
|
| Spitzenausgangsstrom (100 μs nicht-wiederholend) |
1,2 A pro Kanal |
|
| Gesamte Wärmeabfuhr (Ptot) |
4 W |
|
| Thermisch |
Lagertemperatur (Tstg) |
-40°C bis +150°C |
| Halbleitertemperatur (Tj) |
-40°C bis +150°C |
|
| Gehäuse |
Durchsteckgehäuse |
PowerDIP-16 (L293D) |
| Oberflächenmontagegehäuse |
SO-20 (L293DD) |
|
| Pin-Count |
16 Pins (PowerDIP) |
|
| Wärmeabfuhr |
Mittlere Pins für die Wärmeabfuhr verbunden |
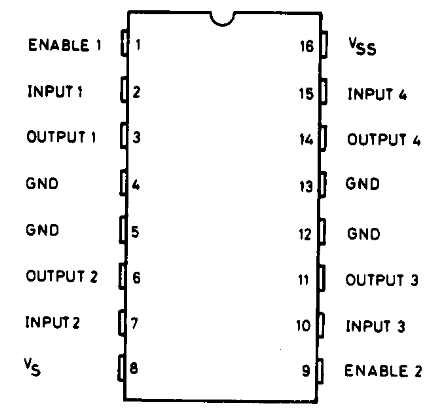
L293D Pinout-Details und Funktionen
| Pin Nr. |
Pin Name |
Typ |
Funktion |
| 1 |
Enable 1 (EN1) |
Eingang |
Aktiviert Treiber 1 und Treiber 2. Muss HIGH sein, damit die Ausgänge 1 und 2 funktionieren. Kann für PWM-Geschwindigkeitsregelung verwendet werden. |
| 2 |
Input 1 (IN1) |
Eingang |
Logiksteuerungs- Eingang für Ausgang 1. Bestimmt die Motordrehrichtung in Verbindung mit Eingang 2. |
| 3 |
Ausgang 1 (OUT1) |
Ausgang |
Treiberausgang verbunden mit einem Anschluss des Motors oder der Last. |
| 4 |
GND |
Stromversorgung |
Erdungsverbindung für das Gerät. |
| 5 |
GND |
Stromversorgung |
Erdungsverbindung für das Gerät. |
| 6 |
Ausgang 2 (OUT2) |
Ausgang |
Treiberausgang verbunden mit dem anderen Anschluss des Motors oder der Last. |
| 7 |
Input 2 (IN2) |
Eingang |
Logiksteuerungs- Eingang für Ausgang 2. Arbeitet mit Eingang 1 für die Steuerung der Drehrichtung. |
| 8 |
Vs |
Stromversorgung |
Motornetzspannung Eingang. Unterstützt Motorenspannungen bis zu 36 V. |
| 9 |
Enable 2 (EN2) |
Eingang |
Aktiviert Treiber 3 und Treiber 4. Muss HIGH sein, damit die Ausgänge 3 und 4 funktionieren. Kann für PWM-Geschwindigkeitsregelung verwendet werden. |
| 10 |
Input 3 (IN3) |
Eingang |
Logiksteuerungs- Eingang für Ausgang 3. Bestimmt die Motordrehrichtung in Verbindung mit Eingang 4. |
| 11 |
Ausgang 3 (OUT3) |
Ausgang |
Treiberausgang verbunden mit einem Anschluss des zweiten Motors oder der Last. |
| 12 |
GND |
Stromversorgung |
Erdungsverbindung für das Gerät. |
| 13 |
GND |
Stromversorgung |
Erdungsverbindung für das Gerät. |
| 14 |
Ausgang 4 (OUT4) |
Ausgang |
Treiberausgang verbunden mit dem anderen Anschluss des zweiten Motors oder der Last. |
| 15 |
Input 4 (IN4) |
Eingang |
Logiksteuerungs- Eingang für Ausgang 4. Arbeitet mit Eingang 3 für die Steuerung der Drehrichtung. |
| 16 |
Vss |
Stromversorgung |
Logikversorgungs- spannungseingang (typischerweise 5 V) für die interne Steuerschaltung. |
L293D Funktionsblockdiagramm
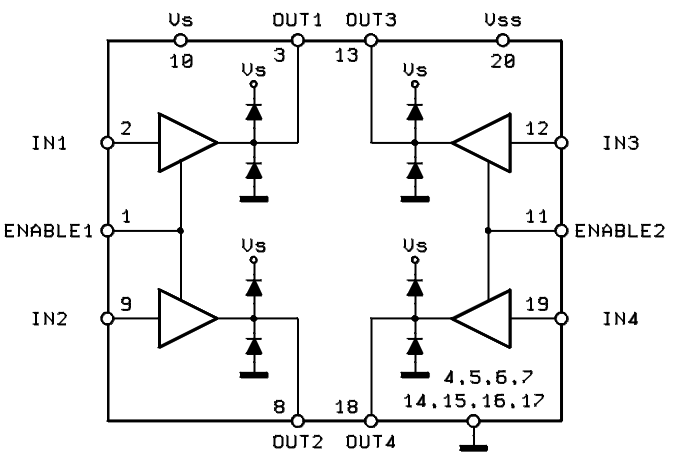
Das Funktionsblockdiagramm zeigt, wie Steuersignale durch den L293D fließen, um eine angeschlossene Last zu betreiben. Wenn ein Logiksignal an einen der Eingangs-Pins angelegt wird, gelangt es in die interne Steuerschaltung, die das Signal verarbeitet und den Zustand des entsprechenden Ausgangstreibers bestimmt. Die Ausgangsstufe verwendet dann die Motornetzspannung, um den erforderlichen Strom an die an die Ausgangspins angeschlossene Last zu liefern.
Das Diagramm veranschaulicht auch, wie jedes Paar von Eingängen und Ausgängen einen H-Brücken-Treiber bildet. Durch Ändern der Logikzustände der Eingänge kann der Strom in verschiedene Richtungen durch die Last fließen, was eine Vorwärts- und Rückwärtsdrehung des Motors ermöglicht. Die Enable-Pins fungieren als Steuertore für jede H-Brücken-Sektion und können verwendet werden, um die Ausgänge ein- oder auszuschalten oder PWM-Signale für die Geschwindigkeitsregelung anzuwenden. Dieser Signalfluss vom Eingang zum Ausgang ermöglicht es dem L293D, gesteuerte bidirektionale Schaltungen für Motoranwendungen bereitzustellen.
L293D Arduino-Schnittstellenprozess
Das grundlegende Schaltbild zeigt einen Arduino Uno, der mit einem L293D-Motortreiber-IC verbunden ist, das verwendet wird, um zwei Gleichstrommotoren zu steuern. Der Arduino liefert die Logiksteuersignale, während eine separate 5 V-Stromversorgung den Strom bereitstellt, der von den Motoren benötigt wird. Der L293D fungiert als Schnittstelle zwischen den stromschwachen Arduino-Pins und den hochstromführenden Motorlasten. Eingangs-Pins am L293D empfangen Steuersignale vom Arduino, während die Ausgangspins direkt mit den Motoren verbunden sind. Sowohl der Arduino als auch die externe Stromversorgung müssen eine gemeinsame Erdung haben, um die ordnungsgemäße Funktionsweise sicherzustellen.
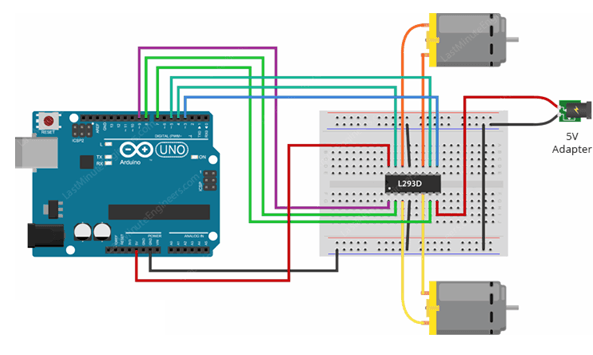
Die Motorgeschwindigkeit kann mit Pulsweitenmodulation (PWM) gesteuert werden. Bei dieser Methode sendet der Arduino ein PWM-Signal an einen der Enable-Pins des L293D. Durch Ändern des PWM-Tastverhältnisses ändert sich die durchschnittlich angelegte Spannung am Motor, wodurch eine sanfte Geschwindigkeitsanpassung ohne Änderung der Versorgungsspannung möglich ist.
Die Motordrehrichtung wird über die Eingangs-Pins gesteuert. Wenn beispielsweise IN1 HIGH und IN2 LOW eingestellt ist, dreht sich der Motor in eine Richtung, während das Umkehren der Logikpegel dazu führt, dass sich der Motor in die entgegengesetzte Richtung dreht. Das Anlegen desselben Logikpegels an beide Eingänge kann den Motor je nach Schaltungskonfiguration stoppen oder bremsen.
Einer der häufigsten Programmierfehler besteht darin, den Enable-Pin als Ausgang zu konfigurieren oder ihn auf LOW zu lassen, was das Laufen des Motors verhindert. Falsche Pin-Zuweisungen im Code können auch unerwartetes Motorverhalten verursachen. Ein weiteres häufiges Problem ist das Versäumnis, eine gemeinsame Masse zwischen dem Arduino und der Motorstromversorgung zu teilen, was zu instabilen Betrieb oder überhaupt keiner Motorantwort führt.
L293D vs Andere Motorsteuerungs-ICs
| Spezifikation |
L293D |
L298N |
TB6612FNG |
DRV8833 |
BTS7960 |
| Treiber-Typ |
Doppelte H-Brücke |
Doppelte H-Brücke |
Doppelte H-Brücke |
Doppelte H-Brücke |
Vollständige H-Brücke |
| Motorversorgungsspannung |
4,5 V bis 36 V |
5 V bis 46 V |
4,5 V bis 13,5 V |
2,7 V bis 10,8 V |
5,5 V bis 27 V |
| Logikspannung |
4,5 V bis 7 V |
5 V |
2,7 V bis 5,5 V |
2 V bis 7 V |
3,3 V bis 5 V |
| Dauerhafte Ausgangsstromstärke |
600 mA/Kanal |
2 A/Kanal |
1,2 A/Kanal |
1,5 A/Kanal |
43 A |
| Spitzen-Ausgangsstromstärke |
1,2 A/Kanal |
3 A/Kanal |
3,2 A/Kanal |
2 A/Kanal |
55 A |
| Interne Schutzdioden |
Ja |
Nein |
Ja |
Ja |
Ja |
| Thermalschutz |
Ja |
Ja |
Ja |
Ja |
Ja |
| PWM-Unterstützung |
Ja |
Ja |
Ja |
Ja |
Ja |
| Ausgangstechnologie |
Bipolare Transistoren |
Bipolare Transistoren |
MOSFET |
MOSFET |
MOSFET |
| Effizienz |
Niedrig |
Niedrig |
Hoch |
Hoch |
Sehr hoch |
| Spannungsabfall |
Hoch (≈1.2–1.8 V pro Seite) |
Hoch (≈2–4 V insgesamt) |
Niedrig (<0.5 V typical) |
Niedrig (<0.4 V typical) |
Sehr niedrig |
| Wärmeentwicklung |
Hoch |
Hoch |
Niedrig |
Niedrig |
Niedrig |
| Externer Kühlkörper erforderlich |
Normalerweise nicht |
Oft erforderlich |
Selten erforderlich |
Selten erforderlich |
Erforderlich bei hohem Strom |
| Anzahl der DC-Motoren |
2 |
2 |
2 |
2 |
1 Hochleistung-Motor |
| Am besten geeignet für |
Kleine DC-Motoren, Bildungsprojekte |
Mittelgroße Motoren |
Roboter, Batteriegeräte |
Kompakte tragbare Designs |
Hochleistungs-Motoren und Robotik |
Typische Anwendungen und Nutzungsszenarien
Bildungs- und Arduino-Projekte
Der L293D wird häufig in Bildungsprojekten und Arduino-basierten Lernplattformen verwendet. Seine einfache Schnittstelle ermöglicht es Anfängern, DC-Motoren zu steuern und grundlegende Konzepte wie die Steuerung der Motordrehung, PWM-Geschwindigkeitssteuerung und H-Brücken-Betrieb ohne komplexe Schaltung zu erlernen.
Kleine mobile Roboter
Viele kleine Roboterfahrzeuge nutzen den L293D, um zwei DC-Motoren unabhängig zu steuern. Dies ermöglicht es dem Roboter, vorwärts zu fahren, rückwärts zu fahren, nach links und nach rechts zu drehen, indem die Richtung und Geschwindigkeit jedes Motors separat gesteuert werden.
Schrittmotorsteuerung
Die duale H-Brücken-Architektur des L293D kann verwendet werden, um bipolare Schrittmotoren zu steuern. Durch das Ansteuern der Motorwicklungen in einer bestimmten Reihenfolge ermöglicht der Treiber präzise schrittweise Bewegungen für Positionierungsanwendungen.
Relais- und Solenoidsteuerung
Der L293D kann Relais und Solenoide steuern, die mehr Strom benötigen, als ein Mikrocontroller-Ausgangspin bereitstellen kann. Die integrierten Schutzdioden helfen, Spannungsstößen, die beim Schalten dieser induktiven Lasten entstehen, entgegenzuwirken.
Automatisierte Steuersysteme
In einfachen Automatisierungssystemen wird der L293D verwendet, um kleine Aktuatoren, Ventile und mechanische Geräte zu steuern. Der Treiber bietet eine einfache Möglichkeit, Logikschaltungen mit elektromechanischen Lasten zu verbinden.
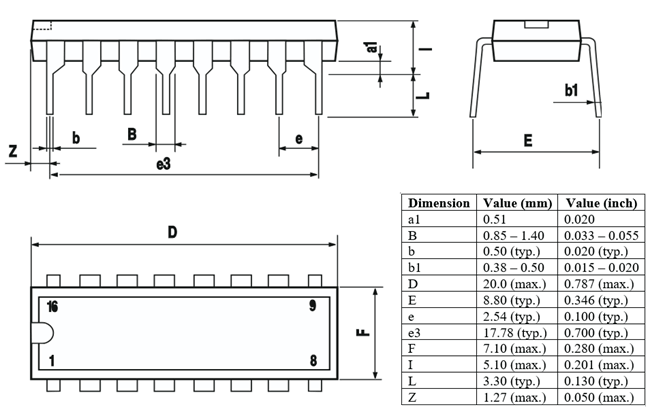
Mechanische Abmessungen
Hersteller
STMicroelectronics ist einer der weltweit führenden Halbleiterhersteller mit jahrzehntelanger Erfahrung in der Entwicklung und Produktion von analogen Schaltungen, Stromversorgungsmanagement, Motorsteuerung und gemischten Signal-Integrationsschaltungen. Für Produkte wie den L293D-Motortreiber-IC verwendet STMicroelectronics ausgereifte Halbleiterfertigungsprozesse, um eine konsistente elektrische Leistung, Zuverlässigkeit, thermische Stabilität und langfristige Produktverfügbarkeit sicherzustellen. Seine Fertigungskapazitäten werden durch umfassende Forschungs- und Entwicklungsressourcen, automatisierte Produktionssysteme und die Einhaltung internationaler Qualitäts- und Umweltstandards unterstützt.
Häufig gestellte Fragen [FAQ]
1. Warum hat der L293D separate Pins für Logik- und Motorstromversorgungen?
Der L293D verwendet separate Stromversorgungen, sodass der Logikschaltkreis und der Motorsschaltkreis bei unterschiedlichen Spannungen arbeiten können. Dadurch kann ein Mikrocontroller mit niedrigerer Spannung einen Motor mit höherer Spannung steuern, ohne die Steuerungsschaltung der Versorgungsspannung des Motors auszusetzen.
2. Wie schützt sich der L293D vor Spannungsspitzen, die von Motoren erzeugt werden?
Der L293D enthält interne Clamp-Dioden, die die Rückwärtsspannung absorbieren, die erzeugt wird, wenn eine induktive Last abgeschaltet wird. Diese Dioden helfen, Schäden am Treiber zu verhindern und verbessern die allgemeine Zuverlässigkeit des Schaltkreises.
3. Warum läuft ein vom L293D gesteuerter Motor oft langsamer als erwartet?
Der L293D verwendet bipolar-transistorische Ausgangsstufen, die einen Spannungsabfall zwischen der Stromversorgung und dem Motor erzeugen. Infolgedessen erhält der Motor weniger Spannung, als die Stromquelle bereitstellt, was die Geschwindigkeit und das Drehmoment reduzieren kann.
4. Kann der L293D zwei Motoren unabhängig bei unterschiedlichen Geschwindigkeiten steuern?
Ja. Jeder H-Brücken-Bereich kann separat gesteuert werden. Durch das Anlegen unterschiedlicher PWM-Signale an die Aktivierungspins kann jeder Motor mit eigener Geschwindigkeit und Richtung betrieben werden.
5. Was passiert, wenn der Aktivierungspin nicht angeschlossen bleibt?
Die entsprechenden Ausgänge können deaktiviert bleiben oder unvorhersehbar arbeiten. Der Aktivierungspin sollte mit einem definierten HIGH- oder PWM-Signal verbunden werden, um eine ordnungsgemäße Motorsteuerung sicherzustellen.
6. Warum ist eine gemeinsame Masse zwischen dem Arduino und der L293D-Stromversorgung erforderlich?
Eine gemeinsame Masse bietet einen gemeinsamen Spannungsreferenz zwischen dem Steuerungsschaltkreis und dem Motortreiber. Ohne sie könnten die Logiksignale nicht korrekt interpretiert werden, was zu unzuverlässigem Betrieb führt.
7. Wann sollten Sie einen modernen Motortreiber anstelle des L293D wählen?
Für batteriebetriebene Geräte, Hochstrommotoren oder Anwendungen, die maximale Effizienz erfordern, sind moderne, auf MOSFET basierende Treiber wie der TB6612FNG oder DRV8833 oft die bessere Wahl, da sie weniger Wärme erzeugen und weniger Energie verschwenden.
Verwandter Artikel
-
![Schritt-für-Schritt Herstellung von integrierten Schaltkreisen]() Jun 09 2026
Jun 09 2026 -
![Eingangs- und Ausgangswiderstand in Operationsverstärkern]() Jun 09 2026
Jun 09 2026


Verwandte -Produkte

GCM1885C1H681JA16J
CAP CER 680PF 50V C0G/NP0 0603
06033D683KAT2A
CAP CER 0.068UF 25V X5R 0603

ADP1762ACPZ-R7
IC REG LINEAR POS ADJ 2A 16LFCSP

22257C154MAT1A
CAP CER 0.15UF 500V X7R 2225
EP3C80F484I7
IC FPGA 295 I/O 484FBGA

ICL232CBET
IC TRANSCEIVER FULL 2/2 16SOIC

LM25011AMYE
IC REG BUCK ADJUSTABLE 2A 10MSOP

LC33864M-80
LC33864M-80 SANYO

SGA3363Z
RFMD SOT363

SST-200XRUZ
SST-200XRUZ AD

MRFIC913
MRFIC913 MOT

MT29E128G08CMCBBH2-12:B
MT29E128G08CMCBBH2-12:B MICRON

XC4003A-5PC84C
XILINX PLCC