Alle Kategorien
-
Integrierte schaltkreise (ICS)
Integrierte schaltkreise (ICS)
- Schnittstelle - Sensor, kapazitive Berührung(642)
- Spezialisierte ICS(12302)
- PMIC-Spannungsregler-besonderer Zweck(5644)
- PMIC-Spannungsregler-lineare Regler(793)
- PMIC-Spannungsregler-linear + Switching(1829)
- PMIC-Spannungsregler-linear(70981)
- PMIC-Spannungsregler-DC DC Switching Regulators(39569)
- PMIC-Regler-DC-DC-Switching-Controller(13507)
- PMIC-Spannungs-Referenz(9453)
- PMIC-v/f und f/v-Wandler(145)
- PMIC-Thermal Management(592)
- PMIC-Supervisor(47946)
- PMIC-RMS bis DC-Wandler(170)
- PMIC-Netzteil-Controller, Monitore(2104)
- PMIC-Power over Ethernet (PoE) Controller(1008)
- PMIC-Power Management-spezialisierte(7722)
- PMIC-Netzschalter, Treiber laden(7706)
- PMIC-PFC (Power Factor Correction)(1222)
- PMIC oder Steuerungen, ideale Dioden(705)
- PMIC-Motor-Treiber, Regler(4712)
- PMIC-Beleuchtung, Ballast-Regler(560)
- PMIC-LED-Treiber(7282)
- PMIC-Laser-Treiber(573)
- PMIC-Hot-Swap-Controller(2816)
- PMIC-Gate-Treiber(7083)
- PMIC-voll, Half-Bridge-Treiber(1342)
- PMIC-Energy Messung(654)
- PMIC-Display-Treiber(1435)
- PMIC-derzeitige Regulierung/Management(1481)
- PMIC-Batterie-Management(5553)
- PMIC-Ladegeräte(3831)
- PMIC-AC DC Konverter, Offline Schalter(4905)
- Memory-Controller(358)
- Memory-Konfigurations-Proms für FPGAs(639)
- Speicher-Akkus(13)
- Erinnerung(65694)
- Logic-universelle Bus-Funktionen(706)
- Logic-Übersetzer, Level-Shifter(2854)
- Logik-Specialty Logic(1870)
- Logik-Signal-Schalter, Multiplexer, Decoder(9420)
- Logic-Shift-Register(2665)
- Logic-Parity Generatoren und Checkers(335)
- Logic-multivibratoren(831)
- Logik-Latches(3658)
- Logik - Tore und Wechselrichter - Multifunktion, konfigurierbar(1687)
- Logik-Tore und Wechselrichter(16453)
- Logic-Flip Flops(7780)
- Logik-FIFOs Speicher(4240)
- Logik-Zähler, Trennlinien(3456)
- Logik-Vergleichsoperator(592)
- Logik-Puffer, Treiber, Receiver, Transceiver(17835)
- Linear-Video-Verarbeitung(2909)
- Linear-Vergleichsoperator(5084)
- Linear-analoge Multiplikatoren, Trennwände(263)
- Linear-Verstärker-Video Amps und Module(1905)
- Linear-Verstärker-Spezial-Zweck(1856)
- Linear - Verstärker - Instrumentierung, OP -Verstärker, Pufferverstärker(34236)
- Linear-Verstärker-Audio(4567)
- Interface-Voice Record und Playback(556)
- Schnittstelle - UARTs (Universal Asynchronous Receivers -Sender)(1237)
- Schnittstelle-Telecom(4467)
- Interface-spezialisierte(4833)
- Interface-Signal Terminatoren(333)
- Interface-Signal-Puffer, Repeater, Splitter(1449)
- Interface-Serializer, Deserializer(1480)
- Schnittstellen-Sensor und Detektor-Interfaces(1524)
- Interface-Module(169)
- Interface-Modems-ICS und Module(407)
- Interface-e/a-Expander(1136)
- Interface-Filter-aktiv(1226)
- Interface-Encoder, Decoder, Konverter(714)
- Interface-Treiber, Receiver, Transceiver(20755)
- Interface-Direct Digital Synthesis (DDS)(117)
- Interface-Controller(3628)
- Interface-Codecs(1676)
- Schnittstelle - Analoge Switches, Multiplexer, Demultiplexer(12567)
- Schnittstelle-analoge Schalter-spezieller Zweck(2533)
- Embedded-System on Chip (SoC)(4496)
- Embedded-PLDs (programmierbare Logik-Vorrichtung)(971)
- Embedded-Mikroprozessoren(10083)
- Embedded-Mikrocontroller-anwendungsspezifische(2275)
- Embedded-Mikrocontroller(99285)
- Eingebettet - Mikrocontroller, Mikroprozessor, FPGA -Module(1527)
- Eingebettet - FPGAs (Feldprogrammiergate -Array) mit Mikrocontrollern(81)
- Embedded-FPGAs (Field Programmable Gate Array)(27747)
- Embedded-DSP (Digital Signal Processors)(4081)
- Eingebettet - CPLDs (komplexe programmierbare Logikgeräte)(5187)
- Datenerfassung-Touch Screen Controller(1210)
- Datenerfassung-Digital to Analog Converter (DAC)(14419)
- Datenerfassung-digitale Potentiometer(6250)
- Datenerfassung-analog zu Digital Converters (ADC)(17776)
- Datenerfassung-analoges Frontend (AFE)(787)
- Datenerfassung-MDE/DACs-spezieller Zweck(3043)
- Clock/Timing-Uhren in Echtzeit(2446)
- Uhr/Timing - programmierbare Timer und Oszillatoren(23469)
- Clock/Timing-IC-Akkus(4)
- Takt/Timing-Delay Lines(1049)
- Uhr/Timing - Uhrengeneratoren, PLLS, Frequenzsynthesizer(32775)
- Clock/Timing-Clock Puffer, Treiber(4568)
- Clock/Timing-anwendungsspezifische(8652)
- Audio Spezial-Zweck(1564)
Relevanter Hersteller







-
Diskrete Halbleiter-Produkte
Diskrete Halbleiter-Produkte
- Aktuelle Regulierung - Dioden, Transistoren(1090)
- Transistoren-besonderer Zweck(226)
- Transistoren-programmierbare Unijunction(48)
- Transistoren-jfets(1558)
- Transistoren-IGBTs-Einzel(4799)
- Transistoren-IGBTs-Module(63420)
- Transistoren-IGBTs-Arrays(26)
- Transistoren-FETs, MOSFETs-Einzel(48330)
- Transistoren-FETs, MOSFETs-RF(4903)
- Transistoren-FETs, MOSFETs-Arrays(6641)
- Transistoren-Bipolar (BJT)-einzeln, Pre-biased(4539)
- Transistoren-Bipolar (BJT)-Einzel(25800)
- Transistoren-Bipolar (BJT)-RF(2087)
- Transistoren-bipolare (BJT)-Arrays, Pre-biased(2115)
- Transistoren-bipolare (BJT)-Arrays(2310)
- Thyristor-triacs(4044)
- Thyristoren-SCRs-Module(3967)
- Thyristoren-SCRs(5436)
- Thyristoren-diacs, sidacs(319)
- Power Driver Module(1627)
- Dioden-zenerdioden-Einzel(87483)
- Dioden-zenerdioden-Arrays(2619)
- Dioden - variable Kapazität (Varik, Varaktoren)(1200)
- Dioden-RF(2753)
- Dioden-Gleichrichter-Einzel(67528)
- Dioden-Gleichrichter-Arrays(20581)
- Dioden-Brücke-Gleichrichter(11700)
Relevanter Hersteller




-
RF/if und RFID
RF/if und RFID
- SIM -Karten für Abonnenten -Identifikationsmodul (SIM)(77)
- RF -Zirkulatoren und Isolatoren(1742)
- RFID, RF-Zugang, Monitoring-ICS(1550)
- RFID Transponder, Tags(747)
- RFID Lesegeräte(464)
- RFID -Bewertungs- und Entwicklungskits, Boards(30)
- RFID Antennen(329)
- RFI und EMI - Abschirm- und Absorbungsmaterialien(6444)
- HF und EMI-Kontakte, Fingerstock und Dichtungen(7497)
- RF Transmitter(668)
- RF Transceiver Module(6900)
- RF-Transceiver ICS(4169)
- HF-Schalter(9276)
- RF Shields(16401)
- HF-Receiver(1998)
- HF -Empfänger, Sender und Transceiver -Einheiten(2763)
- RF Power Divider/Splitter(1223)
- RF Power Controller ICs(86)
- HF-Modulatoren(710)
- HF-Mixer(2800)
- RF misc ICS und Module(3276)
- HF-Front-End (LNA + PA)(419)
- RF -Bewertungs- und Entwicklungskits, Boards(747)
- HF-gerichtete Kupplung(2718)
- RF Diplexer(1464)
- RF-Detektoren(412)
- RF-Demodulatoren(249)
- HF-Antennen(12319)
- HF-Verstärker(19651)
- Balun(1496)
- Dämpfungsglieder(4852)
Relevanter Hersteller







-
Optoelektronik
Optoelektronik
- Optomechanisch(480)
- Leuchten(125)
- Laserdioden, Lasermodule - Laserlieferung, Laserfasern(345)
- Hene Lasersysteme(31)
- Hene Laserköpfe(27)
- Hintergrundbeleuchtung anzeigen(93)
- Xenon-Beleuchtung(387)
- Touchscreen-Overlays(453)
- Panel Indicators, Pilot Lights(75729)
- Optik-Remote-Phosphor-Lichtquelle(269)
- Optik-Reflektoren(665)
- Optik-leichte Rohre(5384)
- Optik-Objektive(4951)
- LEDs-Spacer, Unentschieden(2718)
- LEDs-Lamp-Ersetzungen(29718)
- LEDs - Leiterplattenindikatoren, Arrays, Lichtstäbe, Balkendiagramme(9083)
- LED-thermische Produkte(667)
- LED-Beleuchtung(64)
- LED-Beleuchtung-weiß(37580)
- LED-Beleuchtung-Farbe(4728)
- LED-Beleuchtung-Maiskolben, Motoren, Module(28735)
- LED-Anzeige-diskret(27601)
- Laserdioden, Module(1553)
- Lampen-Glühlampen, Neons(311004)
- Lampen-Kälte-Fluoreszenz (KKL) & UV(164)
- Wechselrichter(7728)
- Infrarot, UV, sichtbare Strahler(3871)
- Fiber Optics-Transmitter-Antrieb integriert(4085)
- Fiber Optics-Transmitter-diskrete(350)
- Fiber Optics-Transceiver Module(18758)
- Fiberoptik-Switches, Multiplexer, Demultiplexer(1387)
- Fiberoptik-Receiver(695)
- Fiberoptik-Dämpfung(654)
- Elektrolumineszenz(102)
- Display, Monitor-Interface Controller(98)
- Display-Module-Vakuum-Leuchtstofflampen (VFD)(249)
- Module anzeigen-LED Dot Matrix und Cluster(865)
- Display-Module-LED-Zeichen und numerische(5421)
- Display-Module-LCD, OLED, Graphic(4654)
- Display-Module-LCD, OLED-Zeichen und numerische(2202)
- Display-Blenden, Objektive(88)
- Adresse, Spezialität(458)
Relevanter Hersteller







-
Sensoren, Wandler
Sensoren, Wandler
- Ultraschallempfänger, Sender - Industrial(115)
- Temperatursensoren - Thermostate - Mechanisch - Industrielles(3103)
- Temperatursensoren - Analog und digitaler Ausgang - Industrial(209)
- Näherungssensoren - Industrial(13611)
- Drucksensoren, Wandler - Industrie(26503)
- Optische Sensoren - Photonik - Zähler, Detektoren, SPCM (Einzelphotonzählmodul)(751)
- Optische Sensoren - Kameramodule(875)
- Magnetsensoren - Position, Nähe, Geschwindigkeit (Module) - Industrie(554)
- Kraftsensoren - Industrial(346)
- Flusssensoren - Industrielles(151)
- Float, Level Sensoren - Industrial(310)
- Encoder - Industrial(4980)
- Farbsensoren - Industrial(50)
- Berührungssensoren(100)
- Ultraschall-Receiver, Transmitter(2421)
- Temperatursensoren-Thermostat-Solid State(1096)
- Temperatursensoren-Thermostate-mechanisch(3397)
- Temperatursensoren - Thermoelemente, Temperatursonden(1921)
- Temperatursensoren - RTD (Widerstandstemperaturdetektor)(1525)
- Temperatursensoren-PTC-Thermistoren(2273)
- Temperatursensoren-ntc-thermistoren(13259)
- Temperatursensoren-Analog und Digital Output(3928)
- DMS(1399)
- Spezialisierte Sensoren(1861)
- Solarzellen(503)
- Schock-Sensoren(84)
- Sensor-Interface-Junction-Blöcke(2519)
- Sensor-Kabel-Baugruppen(22011)
- Proximity/Belegung Sensoren-fertige Einheiten(725)
- Näherungsschalter(2860)
- Drucksensoren, Wandler(11317)
- Positionssensoren - Winkel, lineare Positionsmessung(6022)
- Optische Sensoren-reflektierende-Logik-Ausgang(194)
- Optische Sensoren - reflektierend - analoge Ausgang(432)
- Optische Sensoren-Phototransistoren(1027)
- Optische Sensoren - Photointerrupter - Schlitztyp - Transistorausgang(1427)
- Optische Sensoren - Photointerrupter - Schlitztyp - Logikausgabe(1215)
- Optische Sensoren-Lichtschranke, Industrial(16763)
- Optische Sensoren-Photodioden(1543)
- Optische Sensoren-Foto-Detektoren-Remote Receiver(2605)
- Optische Sensoren-Foto-Detektoren-Logik-Ausgang(146)
- Optische Sensoren-Foto-Detektoren-CDs-Zellen(74)
- Optische Sensoren-Distanz-Messung(377)
- Optische Sensoren-Ambient Light, IR, UV Sensoren(1305)
- Multifunktions(558)
- Motion Sensors-Vibration(337)
- Motion Sensors-Tilt Schalter(67)
- Bewegungsmelder-optisch(719)
- Motion Sensors-Neigungssensoren(175)
- Motion Sensors-Imus (Trägheit-Maßeinheiten)(416)
- Motion Sensors-Kreisel(214)
- Motion Sensors-Beschleunigungsmesser(1911)
- Magnete-Sensor abgestimmt(119)
- Magnete-Multi Purpose(1965)
- Magnetische Sensoren-Schalter (Solid State)(3700)
- Magnetsensoren - Position, Nähe, Geschwindigkeit (Module)(5199)
- Magnetische Sensoren-linear, Kompass (ICS)(1247)
- Magnetsensoren - Kompass, Magnetfeld (Module)(35)
- LVDT -Wandler (linearer variabler Differentialtransformator)(204)
- IrDA Transceiver-Module(196)
- Bildsensor, Kamera(2235)
- Feuchtigkeit-Sensoren(1425)
- Gas-Sensoren(1217)
- Force Sensoren(188)
- Durchfluss-Sensoren(550)
- Float, Level Sensoren(1343)
- Encoder(6357)
- Staub-Sensoren(43)
- Aktuelle Wandler(3455)
- Color Sensoren(85)
- Verstärker(1905)
Relevanter Hersteller







-
Anschlüsse, Verbindungen
Anschlüsse, Verbindungen
- USB, DVI, HDMI -Stecker(446)
- Festkörperbeleuchtungsstecker(555)
- Steckdosen für ICs, Transistoren(953)
- Steckbare Steckverbinder(1221)
- Photovoltaik (Solarpanel) Anschlüsse(136)
- Glasfaseranschlüsse(370)
- FFC, FPC (flache flexible) Anschlüsse(761)
- D-Sub, D-förmige Stecker(2887)
- Koaxialverbinder (RF)(2389)
- Rundanschlüsse(14162)
- Stromanbeter Blade Type(273)
- Stecker und Behälter(2597)
- USB, DVI, HDMI Stecker-Adapter(572)
- USB, DVI, HDMI -Stecker(4298)
- Klemmen-Wire to Board Steckverbinder(217)
- Klemmen-Draht-Steckverbinder(4322)
- Klemmen-Draht-Pin Stecker(328)
- Terminals-Revolver Steckverbinder(1273)
- Terminals-spezialisierte Steckverbinder(2042)
- Klemmen-Spaten Verbinder(3902)
- Klemmen-Löten/Stecker(345)
- Klemmen-Verschraubungen(745)
- Klemmen-Ring Steckverbinder(12596)
- Klemmen-rechteckige Steckverbinder(4747)
- Terminals - Schnellverbindungen, schnelle Trennungsanschlüsse(8514)
- Klemmen-PC PIN, Single Post Connectors(3776)
- Klemmen-PC-Pin-Buchsen, Sockel-Steckverbinder(5883)
- Klemmen-magnetische Draht-Steckverbinder(1653)
- Klemmen-Messer Steckverbinder(112)
- Klemmen-Gehäuse, Stiefel(2850)
- Klemmen-Folie Steckverbinder(108)
- Klemmen-Barrel, Bullet-Steckverbinder(1107)
- Klemmen-Adapter(137)
- Terminal-Streifen und Revolver-Boards(1159)
- Terminal Junction Systeme(2533)
- Anschlussblöcke-Draht an Bord(43615)
- Terminal Blocks-spezialisierte(3722)
- Terminal Blocks-Power Distribution(847)
- Anschlussblöcke-Panel Mount(1359)
- Terminal Blocks-Interface Module(1819)
- Anschlussblöcke-Kopfzeilen, Stecker und Buchsen(119920)
- Anschlussblöcke-DIN-Schiene, Kanal(9373)
- Anschlussblöcke-Kontakte(65)
- Anschlussblöcke-Barrier Blocks(47517)
- Anschlussblöcke-Adapter(1059)
- Solid State Lighting Verbinder-Kontakte(271)
- Festkörperbeleuchtungsstecker(1344)
- Buchsen für ICS, Transistoren-Adapter(275)
- Steckdosen für ICs, Transistoren(22148)
- Shunts, Jumper(907)
- Rechteckige Verbinder-Feder geladen(7721)
- Rechteckige Steckverbinder-Gehäuse(43023)
- Rechteckige Verbinder-Kopfzeilen, Spezial-PIN(6129)
- Rechteckige Anschlüsse - Header, Gefäße, weibliche Sockel(229601)
- Rechteckige Verbinder-Kopfzeilen, männliche Pins(543338)
- Rechteckige Anschlüsse - kostenloses Hängen, Panelhalterung(30142)
- Rechteckige Verbinder-Kontakte(10681)
- Rechteckige Anschlüsse - Board in, Direktdraht zum Board(2432)
- Rechteckige Verbinder-Adapter(475)
- Rechteckig - Brett zu Board -Steckern - Header, Behälter, weibliche Sockel(9)
- Rechteckig - Brett zu Board -Steckern - Header, männliche Stifte(2)
- Rechteckige Anschlüsse - Board -Abstandshalter, Stacker (Board zu Board)(238901)
- Rechteckige Anschlüsse - Arrays, Kantentyp, Mezzanin (Board zu Board)(37853)
- Stromanschluss-Eingänge, Steckdosen, Module(10310)
- Steckbare Steckverbinder(6049)
- Photovoltaik- (Solarpanel) Anschlüsse - Kontakte(77)
- Photovoltaik (Solarpanel) Anschlüsse(504)
- Modulare Steckverbinder-Verdrahtung Blöcke(99)
- Modulare Steckverbinder-Stecker(1674)
- Modulare Steckverbinder-Stecker Gehäuse(181)
- Modulare Steckverbinder-Buchsen mit magnetischen(10152)
- Modulare Steckverbinder-Buchsen(23416)
- Modulare Steckverbinder-Adapter(855)
- Memory Connectors-PC Cards-Adapter(21)
- Memory Connectors-PC Card Sockets(3299)
- Memory Connectors-Inline Modul Sockets(3390)
- LGH Steckverbinder(764)
- Keystone-Einsätze(2758)
- Keystone-Frontplatte, Frames(1926)
- Heavy Duty Steckverbinder-Einsätze, Module(4190)
- Schwerlastanschlüsse - Gehäuse, Kapuzen, Basen(17226)
- Heavy Duty Steckverbinder-Frames(523)
- Heavy Duty Steckverbinder-Kontakte(1832)
- Heavy Duty Steckverbinder-Baugruppen(671)
- LWL-Steckverbinder-Gehäuse(919)
- Glasfaser-Steckverbinder - Adapter(4455)
- LWL-Steckverbinder(3001)
- FFC, FPC (flache flexible) Steckverbinder - Gehäuse(652)
- FFC, FPC (flache flexible) Anschlüsse - Kontakte(202)
- FFC, FPC (flache flexible) Anschlüsse(18691)
- D-Sub, d-förmige Steckverbinder-Terminatoren(47)
- D-Sub, d-förmige Steckverbinder-Gehäuse(12238)
- D-Sub, d-förmige Steckverbinder-Kontakte(2714)
- D-Sub, D-förmige Steckverbinder-Rückenschalen, Kapuzen(5995)
- D-Sub, d-förmige Steckverbinder-Adapter(1304)
- D-Sub Steckverbinder(141346)
- D-förmige Steckverbinder-Centronics(8770)
- Kontakte, Frühling geladen und Druck(630)
- Kontakte-Multi Purpose(6196)
- Kontakte-"Leadframe"(122)
- Koaxial-Steckverbinder (RF)-Terminatoren(1231)
- Koaxial-Steckverbinder (RF)-Kontakte(480)
- Koaxial-Steckverbinder (RF)-Adapter(6386)
- Koaxialverbinder (RF)(25734)
- Rundsteckverbinder-Gehäuse(441226)
- Rundsteckverbinder-Kontakte(4737)
- Rundsteckverbinder-backschalen und Kabel-Klemmen(53692)
- Rundsteckverbinder-Adapter(8839)
- Rundanschlüsse(1196254)
- Card Edge Steckverbinder-Gehäuse(469)
- Karte Edge Verbinder-edgeboard Verbinder(672683)
- Card Edge Verbinder-Kontakte(325)
- Card Edge Verbinder-Adapter(73)
- Blade Type Power Steckverbinder-Gehäuse(837)
- Blade Type Power Connectors-Kontakte(393)
- Stromanbeter Blade Type(4163)
- Zwischen Serien-Adapter(649)
- Barrel-Stromanschluss(935)
- Barrel-Audio-Anschlüsse(2432)
- Barrel-Audio Adapter(92)
- Banana und Tip Steckverbinder-Buchsen, Stecker(1644)
- Banana and Tip Connectors-Binding Posts(239)
- Banana und Tip Steckverbinder-Adapter(75)
- Backplane Steckverbinder-spezialisiert(45586)
- Backplane Steckverbinder-Gehäuse(6863)
- Backplane Steckverbinder-Hard metrisch, Standard(6297)
- Backplane Steckverbinder-DIN 41612(9408)
- Backplane Steckverbinder-Kontakte(3583)
- Backplane Connectors-ARINC Einsätze(2357)
- Backplane Steckverbinder-ARINC(3789)
Relevanter Hersteller







-
Widerstände
-
Kondensatoren
Kondensatoren
- Aluminium-Elektrolytkondensatoren(16817)
- Trimmer, Variable Kondensatoren(3151)
- Dünne Folien-Kondensatoren(3473)
- Tantal-Kondensatoren(136103)
- Tantal-Polymer-Kondensatoren(9778)
- Silizium-Kondensatoren(320)
- Niob Oxide Kondensatoren(330)
- Mica und PTFE Kondensatoren(9101)
- Folien-Kondensatoren(150406)
- Elektrische Doppelschichtkondensatoren (EDLC), Superkondensatoren(2782)
- Keramische Kondensatoren(833829)
- Kondensatoren-Netzwerke, Arrays(2383)
- Aluminium-Elektrolytkondensatoren(125325)
- Aluminium-Polymer-Kondensatoren(7544)
Relevanter Hersteller






-
Transformatoren
Transformatoren
Relevanter Hersteller







-
Isolatoren
-
Kristalle, Oszillatoren, Resonatoren
Kristalle, Oszillatoren, Resonatoren
Relevanter Hersteller






-
Switches
Switches
- Verriegelungsschalter(2893)
- Emergency-Stop-Schalter (E-Stop)(1160)
- Kabelzugschalter(571)
- Toggle-Schalter(33608)
- Rändelrads Schalter(742)
- Schalter(14263)
- Snap-Aktion, Endschalter begrenzen(28077)
- Slide-Schalter(5166)
- Selector-Schalter(9720)
- Rotary Switches(13850)
- Rocker Schalter(53790)
- Drucktaste-Schalter-Hall-Effekt(127)
- Drucktaste Schalter(190826)
- Programmierbare Display-Switches(39)
- Navigations-Schalter, Joystick(1882)
- Magnetische, Reed-Schalter(1399)
- Keypad-Schalter(637)
- Keylock Schalter(3684)
- DIP Schalter(7747)
- Konfigurierbare Switch-Komponenten-Objektiv(1435)
- Konfigurierbare Schalter-Komponenten-Lichtquelle(1236)
- Konfigurierbare Switch-Komponenten-Contact Block(1401)
- Konfigurierbare Switch-Komponenten-Body(16077)
- Disconnect-Switch-Komponenten(2567)
Relevanter Hersteller






-
Relais
Relais
- Sicherheitsrelais(1310)
- Reedrelais(1735)
- Hochfrequenz (RF) -Relais(1190)
- Schütze (Festkörper)(686)
- Schütze (elektromechanisch)(11952)
- Kfz-Relais(1881)
- Solid State Relais(10652)
- Signal-Relais, bis zu 2 Ampere(9149)
- Relay-Sockets(2075)
- Power Relays, über 2 Ampere(31604)
- E / A-Relaismodule(712)
- I/o-Relay-Module-Input(2)
- I/o-Relay-Modul-Racks(247)
Relevanter Hersteller
















Sprache auswählen
Aktuelle Sprache
Deutsch
- English
- Deutsch
- Italia
- Français
- 日本語
- 한국의
- русский
- Svenska
- Nederland
- español
- Português
- polski
- Suomi
- Gaeilge
- Slovenská
- Slovenija
- Čeština
- Melayu
- Magyarország
- Hrvatska
- Dansk
- românesc
- Indonesia
- Ελλάδα
- Български език
- Afrikaans
- IsiXhosa
- isiZulu
- lietuvių
- Maori
- Kongeriket
- Монголулс
- O'zbek
- Tiếng Việt
- हिंदी
- اردو
- Kurdî
- Català
- Bosna
- Euskera
- العربية
- فارسی
- Corsa
- Chicheŵa
- עִבְרִית
- Latviešu
- Hausa
- Беларусь
- አማርኛ
- Republika e Shqipërisë
- Eesti Vabariik
- íslenska
- မြန်မာ
- Македонски
- Lëtzebuergesch
- საქართველო
- Cambodia
- Pilipino
- Azərbaycan
- ພາສາລາວ
- বাংলা ভাষার
- پښتو
- malaɡasʲ
- Кыргыз тили
- Ayiti
- Қазақша
- Samoa
- සිංහල
- ภาษาไทย
- Україна
- Kiswahili
- Cрпски
- Galego
- नेपाली
- Sesotho
- Тоҷикӣ
- Türk dili
- ગુજરાતી
- ಕನ್ನಡkannaḍa
- मराठी
DRV8833 Motorsteuerungs-IC: Funktionen, PWM-Steuerung und interne Funktionsweise
Zeit: 2026/05/8
Durchsuchen: 335
In diesem Artikel werden die Funktionen, die Pinbelegung, der interne Betrieb, das Netzteildesign, die Motorsteuerungsmethode, Vergleiche, praktische Anwendungen und Alternativen des DRV8833 erläutert.
Katalog
Was ist der Motortreiber-IC DRV8833?
Die DRV8833 Der Motortreiber-IC ist ein Dual-H-Brücken-Treiber zur Steuerung kleiner Motoren mit zuverlässiger Richtungs- und Geschwindigkeitssteuerung.Es kann zwei DC-Bürstenmotoren oder einen bipolaren Schrittmotor antreiben.Jede H-Brücke verwendet N-Kanal-Leistungs-MOSFETs, um eine effiziente Motorleistung zu liefern und gleichzeitig Leistungsverluste und Wärme zu reduzieren.
Der DRV8833 verfügt außerdem über wichtige Schutzfunktionen wie Überstromschutz, Kurzschlussschutz, Unterspannungssperre und thermische Abschaltung.Es unterstützt auch einen Ruhemodus mit geringem Stromverbrauch, was es praktisch für Systeme macht, die eine effiziente Energienutzung und einen sichereren Motorbetrieb benötigen.
Wenn Sie am Kauf des DRV8833 interessiert sind, kontaktieren Sie uns bitte bezüglich Preis und Verfügbarkeit.
Hauptmerkmale und Spezifikationen des DRV8833
|
Funktion
/ Spezifikation |
Einzelheiten |
|
Motorfahrer
Typ |
Doppelte H-Brücke
Motortreiber |
|
Unterstützte Motoren |
Zwei Gleichstrommotoren bzw
ein bipolarer Schrittmotor |
|
Motorversorgung
Spannung (VM) |
2,7 V bis 10,8 V |
|
Kontinuierlich
Ausgangsstrom |
1,5 A RMS pro
Brücke |
|
Spitzenleistung
Aktuell |
2 A Spitze pro
Brücke |
|
Paralleler Ausgang
Modus |
Bis zu 3 A RMS
und 4 A Spitze |
|
MOSFET
On-Widerstand |
HS + LS insgesamt
360 mΩ |
|
PWM-Strom
Verordnung |
Unterstützt |
|
Strombegrenzung |
Integriert
Strombegrenzungsschaltung |
|
PWM-Frequenz |
50 kHz intern
PWM-Frequenz |
|
Logikeingang
Spannung |
Bis 5,75 V |
|
Schlafmodus
Aktuell |
Typisch 1,6 µA |
|
Unterspannung
Aussperrung |
Typisch 2,6 V |
|
Thermische Abschaltung
Temperatur |
Typischerweise 160°C |
|
Überstrom
Schutz |
Integriert |
|
Kurzschluss
Schutz |
Integriert |
|
Fehlerausgangspin |
Offener Abfluss
nFAULT-Ausgabe |
|
Aufstiegszeit |
Typisch 180 ns |
|
Herbstzeit |
Typisch 160 ns |
|
Tote Zeit |
Typisch 450 ns |
|
Betrieb
Temperaturbereich |
−40 °C bis 150 °C |
|
Lagerung
Temperaturbereich |
−60 °C bis 150 °C |
|
ESD-Schutz
(HBM) |
±4000 V |
|
Paketoptionen |
HTSSOP, TSSOP,
WQFN |
|
Paket-Pin
Zählen |
16 Stifte |
|
Geringer Stromverbrauch
Funktion |
Energiesparender Schlaf
Modus |
|
Thermisches Design |
Thermisch
verbessertes oberflächenmontierbares Paket |
Wie der DRV8833 intern funktioniert
Der DRV8833 arbeitet mit zwei internen H-Brücken-Treiberschaltungen, die die Richtung und Geschwindigkeit der Motoren elektronisch steuern.Jede H-Brücke besteht aus Leistungs-MOSFETs, die den Strom durch die Motorwicklungen schalten.Durch Ändern der eingeschalteten MOSFETs kann der IC den Motor vorwärts oder rückwärts drehen, ohne mechanische Relais zu verwenden.
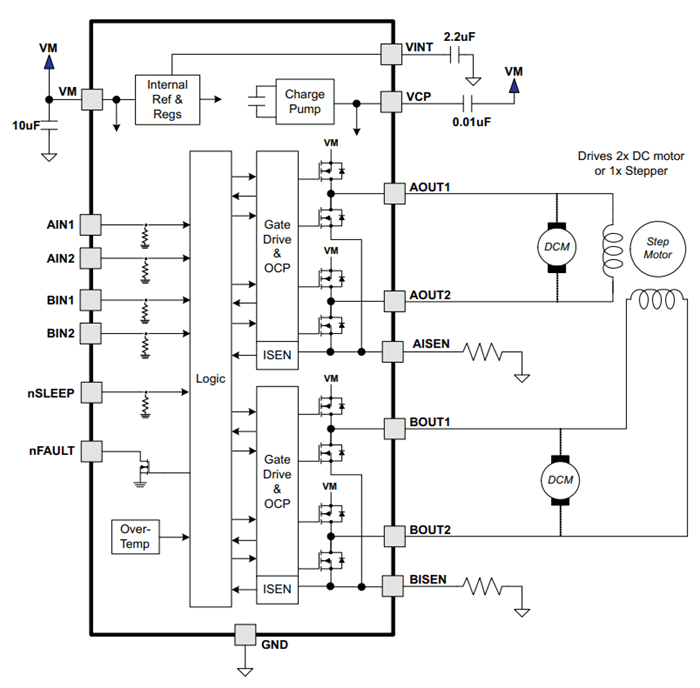
Die Steuersignale werden über die Logikpins AIN1, AIN2, BIN1 und BIN2 eingegeben.Diese Signale durchlaufen den internen Logiksteuerabschnitt, der den Schaltzustand der MOSFETs in jeder H-Brücke bestimmt.Die Gate-Treiberschaltungen aktivieren dann die richtigen MOSFET-Paare, um den Stromfluss zwischen AOUT1/AOUT2 oder BOUT1/BOUT2 zu steuern.
Der DRV8833 enthält außerdem eine interne Ladungspumpe, die dabei hilft, die High-Side-MOSFETs effizient anzutreiben.Stromerfassungsschaltkreise überwachen den Motorstrom über die AISEN- und BISEN-Pins, während integrierter Überstromschutz (OCP), thermische Abschaltung, Unterspannungssperre und Fehlererkennungsschaltkreise dazu beitragen, den IC bei anormalen Betriebsbedingungen zu schützen.
An die Logikeingänge können PWM-Signale angelegt werden, um die Motorgeschwindigkeit zu steuern.Durch schnelles Ein- und Ausschalten der Ausgänge ändert sich die durchschnittliche Spannung, die dem Motor zugeführt wird, und ermöglicht so eine sanfte Drehzahlregelung.
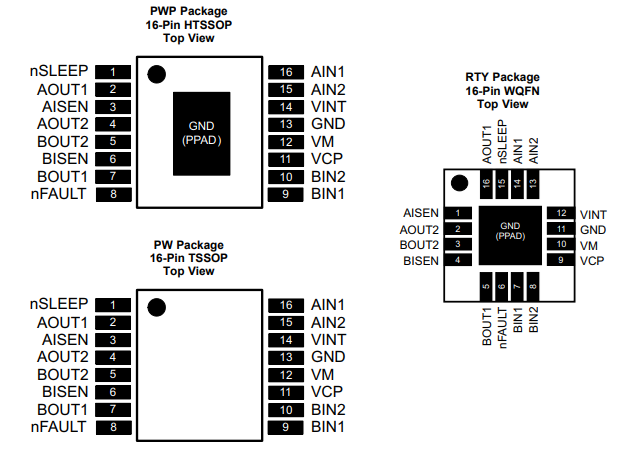
Pinbelegungsfunktionen des DRV8833
|
Pin
Name |
Funktion |
|
nSCHLAF |
Aktiviert oder
deaktiviert das Gerät.Ziehen Sie LOW, um in den Energiesparmodus zu wechseln. |
|
AOUT1 |
Ausgangsterminal
1 für H-Brücke A-Motoranschluss. |
|
AISEN |
Aktueller Sinn
Pin für H-Brücke A. Wird zur Stromregulierung und -begrenzung verwendet. |
|
AOUT2 |
Ausgangsterminal
2 für H-Brücke A-Motoranschluss. |
|
KAMPF2 |
Ausgangsterminal
2 für H-Brücke B-Motoranschluss. |
|
BISEN |
Aktueller Sinn
Pin für H-Brücke B. Wird zur Stromregulierung und -begrenzung verwendet. |
|
KAMPF1 |
Ausgangsterminal
1 für H-Brücke B-Motoranschluss. |
|
nFEHLER |
Open-Drain-Fehler
Ausgangspin.Geht bei Fehlerbedingungen wie Überstrom oder Überhitzung auf LOW
Herunterfahren. |
|
BIN1 |
Logikeingang 1
zur Steuerung des Schaltzustands der H-Brücke B. |
|
BIN2 |
Logikeingang 2
zur Steuerung des Schaltzustands der H-Brücke B. |
|
VCP |
Ladepumpe
Kondensatoranschluss für den High-Side-MOSFET-Gate-Treiberbetrieb. |
|
VM |
Motorleistung
Versorgungseingangsspannungs-Pin. |
|
GND |
Boden
Anschluss für das IC und das Stromversorgungssystem. |
|
VINTAGE |
Intern
Reglerausgangspin, der einen externen Bypass-Kondensator erfordert. |
|
AIN2 |
Logikeingang 2
zur Steuerung des Schaltzustands der H-Brücke A. |
|
AIN1 |
Logikeingang 1
zur Steuerung des Schaltzustands der H-Brücke A. |
So steuern Sie Gleichstrommotoren mit DRV8833
Der DRV8833 steuert Gleichstrommotoren mithilfe zweier interner H-Brücken-Treiberschaltungen, die die Richtung und Geschwindigkeit des durch den Motor fließenden Stroms regeln.Der Motor wird an die Ausgangspins AOUT oder BOUT angeschlossen, während ein Mikrocontroller Logiksignale an die Eingangspins AIN1/AIN2 oder BIN1/BIN2 sendet, um das Motorverhalten zu steuern.
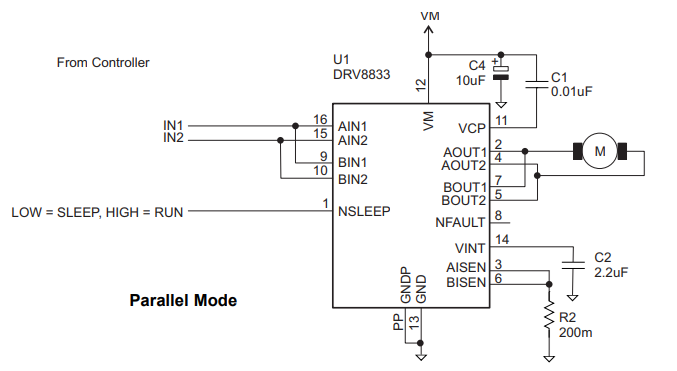
Wenn ein Eingang HIGH und der andere LOW ist, fließt Strom in einer bestimmten Richtung durch den Motor und bewirkt eine Vorwärtsdrehung.Durch Umkehren der Logikzustände ändert sich die Stromrichtung, sodass sich der Motor rückwärts dreht.Werden beide Eingänge auf den gleichen logischen Zustand gesetzt, kann der Fahrer je nach Steuerungskonfiguration den Motor bremsen oder stoppen.
Die Motorgeschwindigkeit wird üblicherweise mithilfe von PWM-Signalen gesteuert, die an die Eingangspins angelegt werden.Durch schnelles Ein- und Ausschalten der Ausgänge ändert sich die durchschnittliche Spannung, die an den Motor geliefert wird, und ermöglicht so eine reibungslose Geschwindigkeitsanpassung.Der DRV8833 unterstützt auch die Schlafsteuerung über den nSLEEP-Pin und verfügt über integrierte Schutzfunktionen wie Überstromschutz, thermische Abschaltung und Unterspannungssperre für einen sichereren Motorbetrieb.
Netzteildesign für DRV8833
Eine stabile Stromversorgung ist wichtig für den zuverlässigen Betrieb des DRV8833, insbesondere beim Antrieb von Motoren, die beim Anfahren, Bremsen oder Richtungswechsel plötzliche Stromänderungen erzeugen.Motorlasten können aufgrund der Drahtinduktivität und des sich schnell ändernden Stromflusses Spannungsspitzen und elektrisches Rauschen erzeugen.Ohne ordnungsgemäße Filterung können diese Störungen zu instabilem Motorverhalten, Controller-Resets oder Treiberabschaltungen führen.
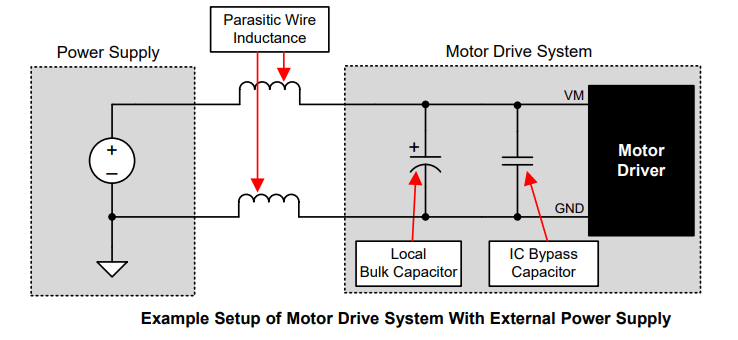
Um die Stabilität zu verbessern, verwendet der DRV8833 normalerweise zwei Kondensatoren in der Nähe des VM-Stromeingangs.Ein lokaler Massenkondensator hilft dabei, große Stromstöße vom Motor zu absorbieren, während ein kleinerer Bypass-Kondensator hochfrequentes Rauschen in der Nähe des IC filtert.Die physische Platzierung dieser Kondensatoren in der Nähe des Motortreibers verringert die Spannungswelligkeit und verbessert das Einschwingverhalten.
Eine ordnungsgemäße Erdung und kurze Stromleitungen sind ebenfalls wichtig, da lange Drähte die parasitäre Induktivität erhöhen, was beim Schalten zu größeren Spannungsspitzen führen kann.Ein sauberes und stabiles Versorgungsdesign trägt dazu bei, die Motorleistung zu verbessern, elektrisches Rauschen zu reduzieren und den Fahrer vor unerwünschten Betriebsbedingungen zu schützen.
DRV8833 vs. L298N vs. TB6612FNG
|
Parameter |
DRV8833 |
L298N |
TB6612FNG |
|
Fahrer
Technologie |
MOSFET-basiert
Doppelte H-Brücke |
Bipolar
Transistor-H-Brücke |
MOSFET-basiert
Doppelte H-Brücke |
|
Motorversorgung
Spannung |
2,7 V bis 10,8 V |
5 V bis 46 V |
2,5 V bis 13,5 V |
|
Kontinuierlich
Ausgangsstrom |
1,5 A pro Brücke |
Etwa 2 A pro
Brücke |
1,2 A pro Brücke |
|
Spitzenleistung
Aktuell |
2 Ein Höhepunkt |
Höherer Anstieg
Fähigkeit, aber weniger effizient |
3,2 Ein Höhepunkt |
|
Effizienz |
Hohe Effizienz |
Geringere Effizienz
aufgrund von Spannungsverlust |
Hohe Effizienz |
|
Wärmeerzeugung |
Niedrig |
Hoch |
Niedrig |
|
Spannungsabfall |
Sehr niedriger MOSFET
Widerstand |
Große Spannung
Abfall (oft 2 V oder mehr) |
Sehr niedrige Spannung
fallen lassen |
|
PWM-Geschwindigkeit
Kontrolle |
Unterstützt |
Unterstützt |
Unterstützt |
|
Niederspannung
Motorunterstützung |
Ausgezeichnet |
Schlecht für
Niederspannungsmotoren |
Ausgezeichnet |
|
Batterie
Effizienz |
Sehr gut |
Schwach, weil
Leistungsverlust |
Sehr gut |
|
Logikspannung
Kompatibilität |
3,3 V und 5 V
kompatibel |
Normalerweise 5 V
Logik |
3,3 V und 5 V
kompatibel |
|
Motorlaufruhe |
Sanfte niedrige Geschwindigkeit
Kontrolle |
Rauer
Leistung bei niedriger Geschwindigkeit |
Laufruhiger Motor
Betrieb |
|
Körperliche Größe |
Kompakt |
Großes Modul
Größe |
Kompakt |
|
Eingebaut
Schutz |
Thermal,
Überstrom, Unterspannung |
Grundlegende Thermik
Nur Schutz |
Thermal und
Überstromschutz |
|
Schlafmodus |
Ja |
Nein |
Ja |
|
Am besten für |
Kleine Roboter und
tragbare Systeme |
Höhere Spannung
Motoren und Einsteigerprojekte |
Effizient
Robotik und batteriebetriebene Systeme |
|
Hauptschwäche |
Begrenzt für
Hochleistungsmotoren |
Ineffizient und
läuft heiß |
Etwas niedriger
Dauerstrom als DRV8833 |
|
Gesamtleistung
Effizienz |
Ausgezeichnet |
Niedrig |
Ausgezeichnet |
|
Anfänger
Freundlichkeit |
Hoch |
Sehr hoch |
Hoch |
|
Modernes Design |
Ja |
Älteres Design |
Ja |
Reale Anwendungen von DRV8833
Differentialantriebssysteme in kleinen mobilen Robotern
Der DRV8833 wird häufig in Robotern mit Zweirad-Differentialantrieb eingesetzt, bei denen jeder Gleichstrommotor für Drehung, Ausgleich und Richtungsbewegung unabhängig gesteuert werden muss.In kompakten Robotern, die mit einzelligen oder zweizelligen Li-Ionen-Batterien betrieben werden, trägt der DRV8833 dazu bei, eine effiziente Motorsteuerung bei geringerer Wärmeentwicklung aufrechtzuerhalten als ältere Treiber wie der L298N.Sein Niederspannungsbetrieb verbessert auch die Batterielaufzeit in autonomen Roboterplattformen, die auf kontinuierliche Bewegung und schnelle PWM-Geschwindigkeitsanpassungen angewiesen sind.
Präzise Motorsteuerung in Line-Follower-Robotern
Linienfolgende Roboter erfordern eine schnelle Geschwindigkeitskorrektur, um mit den Sensoreingaben in Einklang zu bleiben.Der DRV8833 wird häufig verwendet, da sein MOSFET-basiertes H-Brücken-Design eine sanftere PWM-Motorsteuerung und eine schnellere Reaktion bei kontinuierlichen Lenkanpassungen ermöglicht.Dies trägt dazu bei, die Motorverzögerung zu reduzieren und die Verfolgungsgenauigkeit zu verbessern, wenn der Roboter die Radgeschwindigkeit schnell ändert, während er Kurven oder Kreuzungen folgt.
Kamera-Slider und Mini-Gimbal-Bewegungssysteme
Tragbare Kameraslider und leichte Bewegungssteuerungssysteme verwenden den DRV8833 häufig zum Antrieb kompakter Gleichstrommotoren oder kleiner bipolarer Schrittmotoren.Der Treiber trägt dazu bei, kontrollierte langsame Bewegungen für sanfte Kameraübergänge zu erzeugen, insbesondere bei batteriebetriebenen Filmgeräten, bei denen kompakte Größe und Energieeffizienz wichtig sind.Der geringe Standby-Strom kommt auch tragbaren Systemen zugute, die zwischen den Bewegungen längere Zeit im Leerlauf bleiben.
Intelligente Türschlösser und motorisierte Verriegelungssysteme
In elektronischen Smart-Schlössern steuert der DRV8833 kleine umkehrbare Gleichstrommotoren, die Schließmechanismen ausfahren oder einfahren.Die H-Brückenstruktur ermöglicht eine sofortige Umkehr der Motorrichtung für Verriegelungs- und Entriegelungsvorgänge, ohne dass zusätzliche Schalthardware erforderlich ist.Die integrierten Schutzfunktionen tragen außerdem dazu bei, Schäden bei mechanischen Blockaden oder plötzlichen Motorstillständen in kompakten Gehäusen zu verhindern.
Batteriebetriebene medizinische und tragbare Geräte
Kompakte medizinische Pumpen, Handspender und tragbare Automatisierungswerkzeuge nutzen den DRV8833 zur leisen Niederspannungsmotorsteuerung.Da diese Systeme häufig mit wiederaufladbaren Batterien betrieben werden, trägt der niedrige MOSFET-Widerstand des Treibers dazu bei, Energieverluste und Wärmeentwicklung zu reduzieren.Dies verbessert die Betriebseffizienz in geschlossenen tragbaren Geräten, bei denen übermäßige Hitze die Zuverlässigkeit beeinträchtigen kann.
Bildungsrobotik und MINT-Entwicklungsplattformen
Der DRV8833 wird häufig in pädagogische Robotik-Kits integriert, da er gut mit Arduino-, ESP32- und Raspberry Pi-Systemen funktioniert und gleichzeitig Gleichstrom- und Schrittmotoren unterstützt.Studenten und Entwickler können mit PWM-Geschwindigkeitssteuerung, Richtungslogik und Roboternavigation experimentieren, ohne dass komplexe externe Schaltkreise erforderlich sind.Seine Schutzsysteme machen es auch sicherer für Einsteiger-Motorsteuerungsprojekte, bei denen Verdrahtungsfehler häufig vorkommen.
Kompaktförderer und Mini-Automatisierungsmechanismen
Kleine automatisierte Transportsysteme und leichte Förderplattformen nutzen den DRV8833 zur Steuerung bidirektionaler Motorbewegungen auf engstem Raum.Aufgrund der geringen Gehäusegröße und des effizienten Betriebs des Treibers eignet er sich für eingebettete Automatisierungssysteme, bei denen Platinenplatz, Wärmemanagement und Niederspannungsbetrieb entscheidende Designbeschränkungen sind.
Schwenk-Neige-Tracking-Systeme und Sensorpositionierungseinheiten
Schwenk-Neige-Kamerahalterungen und Sensorverfolgungsbaugruppen nutzen den DRV8833 für die präzise Richtungsbewegung von Motoren mit geringer Leistung.Die PWM-basierte Geschwindigkeitsregelung ermöglicht eine sanftere Positionierung und reduziert gleichzeitig plötzliche Rucke bei Bewegungsübergängen.Dies ist nützlich bei kompakten Überwachungssystemen, Objektverfolgungsprototypen und Embedded-Vision-Projekten, die eine stabile Richtungsbewegung erfordern.
Beste Alternativen zu DRV8833
• TB6612FNG
• DRV8871
• L298N
• A4988
• DRV8825
• MX1508
• BTS7960
• MC33926
• L9110S
• TMC2208
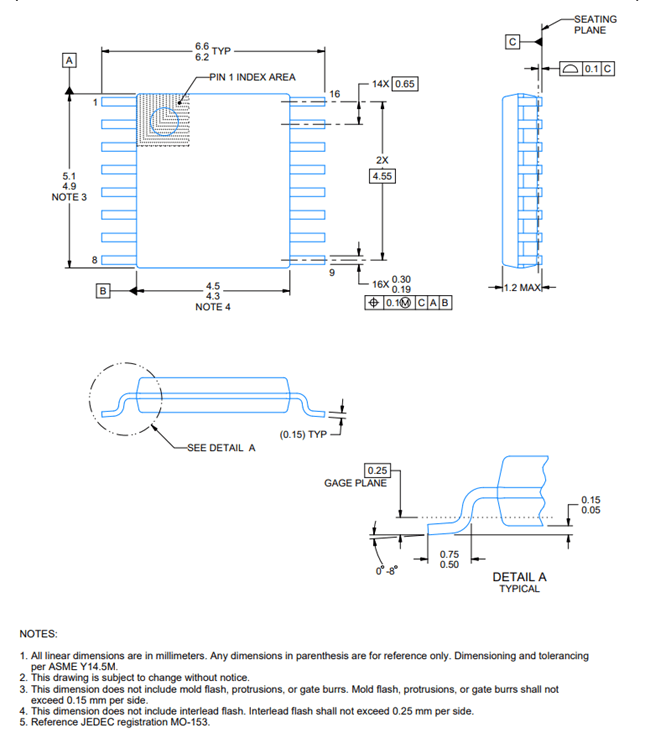
Mechanische Abmessungen
Fazit
Der Motortreiber-IC DRV8833 zur Steuerung kleiner Gleichstrommotoren und bipolarer Schrittmotoren.Sein duales H-Brücken-Design ermöglicht Vorwärts-, Rückwärts-, Brems- und PWM-Geschwindigkeitssteuerung, während sein Niederspannungsbetrieb ihn für Systeme geeignet macht, die eine effiziente Energienutzung erfordern.Im Vergleich zu älteren Treibern wie dem L298N bietet der DRV8833 eine geringere Wärmeentwicklung, einen besseren Wirkungsgrad und eine gleichmäßigere Leistung des Niederspannungsmotors.Ein gutes DRV8833-Design hängt auch von der richtigen Verkabelung, einer stabilen Stromversorgung, der richtigen Kondensatorplatzierung und einem sorgfältigen Strommanagement ab.Wenn es innerhalb seiner Spannungs- und Stromgrenzen verwendet wird, kann es eine zuverlässige Motorsteuerung für viele kompakte Bewegungssysteme bieten.
Häufig gestellte Fragen [FAQ]
1. Warum ist DRV8833 effizienter als L298N?
Der DRV8833 verwendet MOSFETs, die einen geringeren Leistungsverlust aufweisen als die im L298N verwendeten Bipolartransistoren.Dies trägt dazu bei, die Hitze zu reduzieren und die Batterieeffizienz zu verbessern.
2. Wie steuert DRV8833 die Motorgeschwindigkeit?
Es verwendet PWM-Signale, um die Motorleistung schnell ein- und auszuschalten.Eine höhere Einschaltdauer macht den Motor schneller, während eine niedrigere Einschaltdauer ihn verlangsamt.
3. Warum ist das Netzteildesign wichtig?
Motoren können plötzliche Stromspitzen und Geräusche erzeugen.Durch geeignete Kondensatoren und Erdung können Spannungsabfälle, Rücksetzungen und ein instabiles Motorverhalten verhindert werden.
4. Wie kehrt der DRV8833 die Motorrichtung um?
Es ändert, welche MOSFETs innerhalb der H-Brücke eingeschaltet werden.Dadurch wird der Stromfluss durch den Motor umgekehrt.
5. Über welche Schutzfunktionen verfügt DRV8833?
Es umfasst Überstromschutz, Kurzschlussschutz, Unterspannungssperre und thermische Abschaltung.
6. Kann der DRV8833 zwei Motoren antreiben?
Ja.Es kann zwei DC-Bürstenmotoren unabhängig voneinander oder einen bipolaren Schrittmotor antreiben.
7. Ist DRV8833 für Niederspannungssysteme geeignet?
Ja.Es arbeitet mit 2,7 V bis 10,8 V und eignet sich daher für die Steuerung von Niederspannungsmotoren.
Verwandter Artikel
-
![Wie Mikrocontroller in IoT-Anwendungen funktionieren?]() May 08 2026Wie Mikrocontroller in IoT-Anwendungen funktionieren?
May 08 2026Wie Mikrocontroller in IoT-Anwendungen funktionieren?Da IoT-Anwendungen weiter wachsen, ist die Wahl des richtigen Mikrocontrollers zu einer wichtigen Entscheidung geworden.Verschiedene Optionen wie ESP3... -
![{{TEXT_{{TEXT_91}}}}]() May 08 2026{{TEXT_{{TEXT_91}}}}
May 08 2026{{TEXT_{{TEXT_91}}}}Um kleine Motoren richtig zu steuern, benötigt eine Schaltung mehr als nur Strom.Es benötigt einen Motortreiber, der Richtung, Geschwindigkeit, Brem...


Verwandte -Produkte

LMK042B7102MC-W
CAP CER 1000PF 10V X7R 01005
AMK107BBJ226MA-T
CAP CER 22UF 4V X5R 0603

GRM188C81C475KE11J
CAP CER 4.7UF 16V X6S 0603

CC1812KKX7R9BB154
CAP CER 0.15UF 50V X7R 1812

SI5375B-A-GL
IC CLOCK GENERATOR 80BGA

ATF1504ASV-15AU100
IC CPLD 64MC 15NS 100TQFP

TC7W66FU
TC7W66FU TOSHIBA

MC9S12B128CPV
MC9S12B128CPV FREESCALE

LTC3412EFE
LTC3412EFE LINEAR
HI6731RBC200
HISILIC SVFBGA368

LM5674MT
LM5674MT NS

AD1582ART-REEL
UPOWER, PRECISION VOLTAGE REF

AD5291BRUZ-100
256 TAP, 1% DIGIPOT WITH SPI INT