Alle Kategorien
-
Integrierte schaltkreise (ICS)
Integrierte schaltkreise (ICS)
- Schnittstelle - Sensor, kapazitive Berührung(642)
- Spezialisierte ICS(12302)
- PMIC-Spannungsregler-besonderer Zweck(5644)
- PMIC-Spannungsregler-lineare Regler(793)
- PMIC-Spannungsregler-linear + Switching(1829)
- PMIC-Spannungsregler-linear(70981)
- PMIC-Spannungsregler-DC DC Switching Regulators(39569)
- PMIC-Regler-DC-DC-Switching-Controller(13507)
- PMIC-Spannungs-Referenz(9453)
- PMIC-v/f und f/v-Wandler(145)
- PMIC-Thermal Management(592)
- PMIC-Supervisor(47946)
- PMIC-RMS bis DC-Wandler(170)
- PMIC-Netzteil-Controller, Monitore(2104)
- PMIC-Power over Ethernet (PoE) Controller(1008)
- PMIC-Power Management-spezialisierte(7722)
- PMIC-Netzschalter, Treiber laden(7706)
- PMIC-PFC (Power Factor Correction)(1222)
- PMIC oder Steuerungen, ideale Dioden(705)
- PMIC-Motor-Treiber, Regler(4712)
- PMIC-Beleuchtung, Ballast-Regler(560)
- PMIC-LED-Treiber(7282)
- PMIC-Laser-Treiber(573)
- PMIC-Hot-Swap-Controller(2816)
- PMIC-Gate-Treiber(7083)
- PMIC-voll, Half-Bridge-Treiber(1342)
- PMIC-Energy Messung(654)
- PMIC-Display-Treiber(1435)
- PMIC-derzeitige Regulierung/Management(1481)
- PMIC-Batterie-Management(5553)
- PMIC-Ladegeräte(3831)
- PMIC-AC DC Konverter, Offline Schalter(4905)
- Memory-Controller(358)
- Memory-Konfigurations-Proms für FPGAs(639)
- Speicher-Akkus(13)
- Erinnerung(65694)
- Logic-universelle Bus-Funktionen(706)
- Logic-Übersetzer, Level-Shifter(2854)
- Logik-Specialty Logic(1870)
- Logik-Signal-Schalter, Multiplexer, Decoder(9420)
- Logic-Shift-Register(2665)
- Logic-Parity Generatoren und Checkers(335)
- Logic-multivibratoren(831)
- Logik-Latches(3658)
- Logik - Tore und Wechselrichter - Multifunktion, konfigurierbar(1687)
- Logik-Tore und Wechselrichter(16453)
- Logic-Flip Flops(7780)
- Logik-FIFOs Speicher(4240)
- Logik-Zähler, Trennlinien(3456)
- Logik-Vergleichsoperator(592)
- Logik-Puffer, Treiber, Receiver, Transceiver(17835)
- Linear-Video-Verarbeitung(2909)
- Linear-Vergleichsoperator(5084)
- Linear-analoge Multiplikatoren, Trennwände(263)
- Linear-Verstärker-Video Amps und Module(1905)
- Linear-Verstärker-Spezial-Zweck(1856)
- Linear - Verstärker - Instrumentierung, OP -Verstärker, Pufferverstärker(34236)
- Linear-Verstärker-Audio(4567)
- Interface-Voice Record und Playback(556)
- Schnittstelle - UARTs (Universal Asynchronous Receivers -Sender)(1237)
- Schnittstelle-Telecom(4467)
- Interface-spezialisierte(4833)
- Interface-Signal Terminatoren(333)
- Interface-Signal-Puffer, Repeater, Splitter(1449)
- Interface-Serializer, Deserializer(1480)
- Schnittstellen-Sensor und Detektor-Interfaces(1524)
- Interface-Module(169)
- Interface-Modems-ICS und Module(407)
- Interface-e/a-Expander(1136)
- Interface-Filter-aktiv(1226)
- Interface-Encoder, Decoder, Konverter(714)
- Interface-Treiber, Receiver, Transceiver(20755)
- Interface-Direct Digital Synthesis (DDS)(117)
- Interface-Controller(3628)
- Interface-Codecs(1676)
- Schnittstelle - Analoge Switches, Multiplexer, Demultiplexer(12567)
- Schnittstelle-analoge Schalter-spezieller Zweck(2533)
- Embedded-System on Chip (SoC)(4496)
- Embedded-PLDs (programmierbare Logik-Vorrichtung)(971)
- Embedded-Mikroprozessoren(10083)
- Embedded-Mikrocontroller-anwendungsspezifische(2275)
- Embedded-Mikrocontroller(99285)
- Eingebettet - Mikrocontroller, Mikroprozessor, FPGA -Module(1527)
- Eingebettet - FPGAs (Feldprogrammiergate -Array) mit Mikrocontrollern(81)
- Embedded-FPGAs (Field Programmable Gate Array)(27747)
- Embedded-DSP (Digital Signal Processors)(4081)
- Eingebettet - CPLDs (komplexe programmierbare Logikgeräte)(5187)
- Datenerfassung-Touch Screen Controller(1210)
- Datenerfassung-Digital to Analog Converter (DAC)(14419)
- Datenerfassung-digitale Potentiometer(6250)
- Datenerfassung-analog zu Digital Converters (ADC)(17776)
- Datenerfassung-analoges Frontend (AFE)(787)
- Datenerfassung-MDE/DACs-spezieller Zweck(3043)
- Clock/Timing-Uhren in Echtzeit(2446)
- Uhr/Timing - programmierbare Timer und Oszillatoren(23469)
- Clock/Timing-IC-Akkus(4)
- Takt/Timing-Delay Lines(1049)
- Uhr/Timing - Uhrengeneratoren, PLLS, Frequenzsynthesizer(32775)
- Clock/Timing-Clock Puffer, Treiber(4568)
- Clock/Timing-anwendungsspezifische(8652)
- Audio Spezial-Zweck(1564)
Relevanter Hersteller







-
Diskrete Halbleiter-Produkte
Diskrete Halbleiter-Produkte
- Aktuelle Regulierung - Dioden, Transistoren(1090)
- Transistoren-besonderer Zweck(226)
- Transistoren-programmierbare Unijunction(48)
- Transistoren-jfets(1558)
- Transistoren-IGBTs-Einzel(4799)
- Transistoren-IGBTs-Module(63420)
- Transistoren-IGBTs-Arrays(26)
- Transistoren-FETs, MOSFETs-Einzel(48330)
- Transistoren-FETs, MOSFETs-RF(4903)
- Transistoren-FETs, MOSFETs-Arrays(6641)
- Transistoren-Bipolar (BJT)-einzeln, Pre-biased(4539)
- Transistoren-Bipolar (BJT)-Einzel(25800)
- Transistoren-Bipolar (BJT)-RF(2087)
- Transistoren-bipolare (BJT)-Arrays, Pre-biased(2115)
- Transistoren-bipolare (BJT)-Arrays(2310)
- Thyristor-triacs(4044)
- Thyristoren-SCRs-Module(3967)
- Thyristoren-SCRs(5436)
- Thyristoren-diacs, sidacs(319)
- Power Driver Module(1627)
- Dioden-zenerdioden-Einzel(87483)
- Dioden-zenerdioden-Arrays(2619)
- Dioden - variable Kapazität (Varik, Varaktoren)(1200)
- Dioden-RF(2753)
- Dioden-Gleichrichter-Einzel(67528)
- Dioden-Gleichrichter-Arrays(20581)
- Dioden-Brücke-Gleichrichter(11700)
Relevanter Hersteller




-
RF/if und RFID
RF/if und RFID
- SIM -Karten für Abonnenten -Identifikationsmodul (SIM)(77)
- RF -Zirkulatoren und Isolatoren(1742)
- RFID, RF-Zugang, Monitoring-ICS(1550)
- RFID Transponder, Tags(747)
- RFID Lesegeräte(464)
- RFID -Bewertungs- und Entwicklungskits, Boards(30)
- RFID Antennen(329)
- RFI und EMI - Abschirm- und Absorbungsmaterialien(6444)
- HF und EMI-Kontakte, Fingerstock und Dichtungen(7497)
- RF Transmitter(668)
- RF Transceiver Module(6900)
- RF-Transceiver ICS(4169)
- HF-Schalter(9276)
- RF Shields(16401)
- HF-Receiver(1998)
- HF -Empfänger, Sender und Transceiver -Einheiten(2763)
- RF Power Divider/Splitter(1223)
- RF Power Controller ICs(86)
- HF-Modulatoren(710)
- HF-Mixer(2800)
- RF misc ICS und Module(3276)
- HF-Front-End (LNA + PA)(419)
- RF -Bewertungs- und Entwicklungskits, Boards(747)
- HF-gerichtete Kupplung(2718)
- RF Diplexer(1464)
- RF-Detektoren(412)
- RF-Demodulatoren(249)
- HF-Antennen(12319)
- HF-Verstärker(19651)
- Balun(1496)
- Dämpfungsglieder(4852)
Relevanter Hersteller







-
Optoelektronik
Optoelektronik
- Optomechanisch(480)
- Leuchten(125)
- Laserdioden, Lasermodule - Laserlieferung, Laserfasern(345)
- Hene Lasersysteme(31)
- Hene Laserköpfe(27)
- Hintergrundbeleuchtung anzeigen(93)
- Xenon-Beleuchtung(387)
- Touchscreen-Overlays(453)
- Panel Indicators, Pilot Lights(75729)
- Optik-Remote-Phosphor-Lichtquelle(269)
- Optik-Reflektoren(665)
- Optik-leichte Rohre(5384)
- Optik-Objektive(4951)
- LEDs-Spacer, Unentschieden(2718)
- LEDs-Lamp-Ersetzungen(29718)
- LEDs - Leiterplattenindikatoren, Arrays, Lichtstäbe, Balkendiagramme(9083)
- LED-thermische Produkte(667)
- LED-Beleuchtung(64)
- LED-Beleuchtung-weiß(37580)
- LED-Beleuchtung-Farbe(4728)
- LED-Beleuchtung-Maiskolben, Motoren, Module(28735)
- LED-Anzeige-diskret(27601)
- Laserdioden, Module(1553)
- Lampen-Glühlampen, Neons(311004)
- Lampen-Kälte-Fluoreszenz (KKL) & UV(164)
- Wechselrichter(7728)
- Infrarot, UV, sichtbare Strahler(3871)
- Fiber Optics-Transmitter-Antrieb integriert(4085)
- Fiber Optics-Transmitter-diskrete(350)
- Fiber Optics-Transceiver Module(18758)
- Fiberoptik-Switches, Multiplexer, Demultiplexer(1387)
- Fiberoptik-Receiver(695)
- Fiberoptik-Dämpfung(654)
- Elektrolumineszenz(102)
- Display, Monitor-Interface Controller(98)
- Display-Module-Vakuum-Leuchtstofflampen (VFD)(249)
- Module anzeigen-LED Dot Matrix und Cluster(865)
- Display-Module-LED-Zeichen und numerische(5421)
- Display-Module-LCD, OLED, Graphic(4654)
- Display-Module-LCD, OLED-Zeichen und numerische(2202)
- Display-Blenden, Objektive(88)
- Adresse, Spezialität(458)
Relevanter Hersteller







-
Sensoren, Wandler
Sensoren, Wandler
- Ultraschallempfänger, Sender - Industrial(115)
- Temperatursensoren - Thermostate - Mechanisch - Industrielles(3103)
- Temperatursensoren - Analog und digitaler Ausgang - Industrial(209)
- Näherungssensoren - Industrial(13611)
- Drucksensoren, Wandler - Industrie(26503)
- Optische Sensoren - Photonik - Zähler, Detektoren, SPCM (Einzelphotonzählmodul)(751)
- Optische Sensoren - Kameramodule(875)
- Magnetsensoren - Position, Nähe, Geschwindigkeit (Module) - Industrie(554)
- Kraftsensoren - Industrial(346)
- Flusssensoren - Industrielles(151)
- Float, Level Sensoren - Industrial(310)
- Encoder - Industrial(4980)
- Farbsensoren - Industrial(50)
- Berührungssensoren(100)
- Ultraschall-Receiver, Transmitter(2421)
- Temperatursensoren-Thermostat-Solid State(1096)
- Temperatursensoren-Thermostate-mechanisch(3397)
- Temperatursensoren - Thermoelemente, Temperatursonden(1921)
- Temperatursensoren - RTD (Widerstandstemperaturdetektor)(1525)
- Temperatursensoren-PTC-Thermistoren(2273)
- Temperatursensoren-ntc-thermistoren(13259)
- Temperatursensoren-Analog und Digital Output(3928)
- DMS(1399)
- Spezialisierte Sensoren(1861)
- Solarzellen(503)
- Schock-Sensoren(84)
- Sensor-Interface-Junction-Blöcke(2519)
- Sensor-Kabel-Baugruppen(22011)
- Proximity/Belegung Sensoren-fertige Einheiten(725)
- Näherungsschalter(2860)
- Drucksensoren, Wandler(11317)
- Positionssensoren - Winkel, lineare Positionsmessung(6022)
- Optische Sensoren-reflektierende-Logik-Ausgang(194)
- Optische Sensoren - reflektierend - analoge Ausgang(432)
- Optische Sensoren-Phototransistoren(1027)
- Optische Sensoren - Photointerrupter - Schlitztyp - Transistorausgang(1427)
- Optische Sensoren - Photointerrupter - Schlitztyp - Logikausgabe(1215)
- Optische Sensoren-Lichtschranke, Industrial(16763)
- Optische Sensoren-Photodioden(1543)
- Optische Sensoren-Foto-Detektoren-Remote Receiver(2605)
- Optische Sensoren-Foto-Detektoren-Logik-Ausgang(146)
- Optische Sensoren-Foto-Detektoren-CDs-Zellen(74)
- Optische Sensoren-Distanz-Messung(377)
- Optische Sensoren-Ambient Light, IR, UV Sensoren(1305)
- Multifunktions(558)
- Motion Sensors-Vibration(337)
- Motion Sensors-Tilt Schalter(67)
- Bewegungsmelder-optisch(719)
- Motion Sensors-Neigungssensoren(175)
- Motion Sensors-Imus (Trägheit-Maßeinheiten)(416)
- Motion Sensors-Kreisel(214)
- Motion Sensors-Beschleunigungsmesser(1911)
- Magnete-Sensor abgestimmt(119)
- Magnete-Multi Purpose(1965)
- Magnetische Sensoren-Schalter (Solid State)(3700)
- Magnetsensoren - Position, Nähe, Geschwindigkeit (Module)(5199)
- Magnetische Sensoren-linear, Kompass (ICS)(1247)
- Magnetsensoren - Kompass, Magnetfeld (Module)(35)
- LVDT -Wandler (linearer variabler Differentialtransformator)(204)
- IrDA Transceiver-Module(196)
- Bildsensor, Kamera(2235)
- Feuchtigkeit-Sensoren(1425)
- Gas-Sensoren(1217)
- Force Sensoren(188)
- Durchfluss-Sensoren(550)
- Float, Level Sensoren(1343)
- Encoder(6357)
- Staub-Sensoren(43)
- Aktuelle Wandler(3455)
- Color Sensoren(85)
- Verstärker(1905)
Relevanter Hersteller







-
Anschlüsse, Verbindungen
Anschlüsse, Verbindungen
- USB, DVI, HDMI -Stecker(446)
- Festkörperbeleuchtungsstecker(555)
- Steckdosen für ICs, Transistoren(953)
- Steckbare Steckverbinder(1221)
- Photovoltaik (Solarpanel) Anschlüsse(136)
- Glasfaseranschlüsse(370)
- FFC, FPC (flache flexible) Anschlüsse(761)
- D-Sub, D-förmige Stecker(2887)
- Koaxialverbinder (RF)(2389)
- Rundanschlüsse(14162)
- Stromanbeter Blade Type(273)
- Stecker und Behälter(2597)
- USB, DVI, HDMI Stecker-Adapter(572)
- USB, DVI, HDMI -Stecker(4298)
- Klemmen-Wire to Board Steckverbinder(217)
- Klemmen-Draht-Steckverbinder(4322)
- Klemmen-Draht-Pin Stecker(328)
- Terminals-Revolver Steckverbinder(1273)
- Terminals-spezialisierte Steckverbinder(2042)
- Klemmen-Spaten Verbinder(3902)
- Klemmen-Löten/Stecker(345)
- Klemmen-Verschraubungen(745)
- Klemmen-Ring Steckverbinder(12596)
- Klemmen-rechteckige Steckverbinder(4747)
- Terminals - Schnellverbindungen, schnelle Trennungsanschlüsse(8514)
- Klemmen-PC PIN, Single Post Connectors(3776)
- Klemmen-PC-Pin-Buchsen, Sockel-Steckverbinder(5883)
- Klemmen-magnetische Draht-Steckverbinder(1653)
- Klemmen-Messer Steckverbinder(112)
- Klemmen-Gehäuse, Stiefel(2850)
- Klemmen-Folie Steckverbinder(108)
- Klemmen-Barrel, Bullet-Steckverbinder(1107)
- Klemmen-Adapter(137)
- Terminal-Streifen und Revolver-Boards(1159)
- Terminal Junction Systeme(2533)
- Anschlussblöcke-Draht an Bord(43615)
- Terminal Blocks-spezialisierte(3722)
- Terminal Blocks-Power Distribution(847)
- Anschlussblöcke-Panel Mount(1359)
- Terminal Blocks-Interface Module(1819)
- Anschlussblöcke-Kopfzeilen, Stecker und Buchsen(119920)
- Anschlussblöcke-DIN-Schiene, Kanal(9373)
- Anschlussblöcke-Kontakte(65)
- Anschlussblöcke-Barrier Blocks(47517)
- Anschlussblöcke-Adapter(1059)
- Solid State Lighting Verbinder-Kontakte(271)
- Festkörperbeleuchtungsstecker(1344)
- Buchsen für ICS, Transistoren-Adapter(275)
- Steckdosen für ICs, Transistoren(22148)
- Shunts, Jumper(907)
- Rechteckige Verbinder-Feder geladen(7721)
- Rechteckige Steckverbinder-Gehäuse(43023)
- Rechteckige Verbinder-Kopfzeilen, Spezial-PIN(6129)
- Rechteckige Anschlüsse - Header, Gefäße, weibliche Sockel(229601)
- Rechteckige Verbinder-Kopfzeilen, männliche Pins(543338)
- Rechteckige Anschlüsse - kostenloses Hängen, Panelhalterung(30142)
- Rechteckige Verbinder-Kontakte(10681)
- Rechteckige Anschlüsse - Board in, Direktdraht zum Board(2432)
- Rechteckige Verbinder-Adapter(475)
- Rechteckig - Brett zu Board -Steckern - Header, Behälter, weibliche Sockel(9)
- Rechteckig - Brett zu Board -Steckern - Header, männliche Stifte(2)
- Rechteckige Anschlüsse - Board -Abstandshalter, Stacker (Board zu Board)(238901)
- Rechteckige Anschlüsse - Arrays, Kantentyp, Mezzanin (Board zu Board)(37853)
- Stromanschluss-Eingänge, Steckdosen, Module(10310)
- Steckbare Steckverbinder(6049)
- Photovoltaik- (Solarpanel) Anschlüsse - Kontakte(77)
- Photovoltaik (Solarpanel) Anschlüsse(504)
- Modulare Steckverbinder-Verdrahtung Blöcke(99)
- Modulare Steckverbinder-Stecker(1674)
- Modulare Steckverbinder-Stecker Gehäuse(181)
- Modulare Steckverbinder-Buchsen mit magnetischen(10152)
- Modulare Steckverbinder-Buchsen(23416)
- Modulare Steckverbinder-Adapter(855)
- Memory Connectors-PC Cards-Adapter(21)
- Memory Connectors-PC Card Sockets(3299)
- Memory Connectors-Inline Modul Sockets(3390)
- LGH Steckverbinder(764)
- Keystone-Einsätze(2758)
- Keystone-Frontplatte, Frames(1926)
- Heavy Duty Steckverbinder-Einsätze, Module(4190)
- Schwerlastanschlüsse - Gehäuse, Kapuzen, Basen(17226)
- Heavy Duty Steckverbinder-Frames(523)
- Heavy Duty Steckverbinder-Kontakte(1832)
- Heavy Duty Steckverbinder-Baugruppen(671)
- LWL-Steckverbinder-Gehäuse(919)
- Glasfaser-Steckverbinder - Adapter(4455)
- LWL-Steckverbinder(3001)
- FFC, FPC (flache flexible) Steckverbinder - Gehäuse(652)
- FFC, FPC (flache flexible) Anschlüsse - Kontakte(202)
- FFC, FPC (flache flexible) Anschlüsse(18691)
- D-Sub, d-förmige Steckverbinder-Terminatoren(47)
- D-Sub, d-förmige Steckverbinder-Gehäuse(12238)
- D-Sub, d-förmige Steckverbinder-Kontakte(2714)
- D-Sub, D-förmige Steckverbinder-Rückenschalen, Kapuzen(5995)
- D-Sub, d-förmige Steckverbinder-Adapter(1304)
- D-Sub Steckverbinder(141346)
- D-förmige Steckverbinder-Centronics(8770)
- Kontakte, Frühling geladen und Druck(630)
- Kontakte-Multi Purpose(6196)
- Kontakte-"Leadframe"(122)
- Koaxial-Steckverbinder (RF)-Terminatoren(1231)
- Koaxial-Steckverbinder (RF)-Kontakte(480)
- Koaxial-Steckverbinder (RF)-Adapter(6386)
- Koaxialverbinder (RF)(25734)
- Rundsteckverbinder-Gehäuse(441226)
- Rundsteckverbinder-Kontakte(4737)
- Rundsteckverbinder-backschalen und Kabel-Klemmen(53692)
- Rundsteckverbinder-Adapter(8839)
- Rundanschlüsse(1196254)
- Card Edge Steckverbinder-Gehäuse(469)
- Karte Edge Verbinder-edgeboard Verbinder(672683)
- Card Edge Verbinder-Kontakte(325)
- Card Edge Verbinder-Adapter(73)
- Blade Type Power Steckverbinder-Gehäuse(837)
- Blade Type Power Connectors-Kontakte(393)
- Stromanbeter Blade Type(4163)
- Zwischen Serien-Adapter(649)
- Barrel-Stromanschluss(935)
- Barrel-Audio-Anschlüsse(2432)
- Barrel-Audio Adapter(92)
- Banana und Tip Steckverbinder-Buchsen, Stecker(1644)
- Banana and Tip Connectors-Binding Posts(239)
- Banana und Tip Steckverbinder-Adapter(75)
- Backplane Steckverbinder-spezialisiert(45586)
- Backplane Steckverbinder-Gehäuse(6863)
- Backplane Steckverbinder-Hard metrisch, Standard(6297)
- Backplane Steckverbinder-DIN 41612(9408)
- Backplane Steckverbinder-Kontakte(3583)
- Backplane Connectors-ARINC Einsätze(2357)
- Backplane Steckverbinder-ARINC(3789)
Relevanter Hersteller







-
Widerstände
-
Kondensatoren
Kondensatoren
- Aluminium-Elektrolytkondensatoren(16817)
- Trimmer, Variable Kondensatoren(3151)
- Dünne Folien-Kondensatoren(3473)
- Tantal-Kondensatoren(136103)
- Tantal-Polymer-Kondensatoren(9778)
- Silizium-Kondensatoren(320)
- Niob Oxide Kondensatoren(330)
- Mica und PTFE Kondensatoren(9101)
- Folien-Kondensatoren(150406)
- Elektrische Doppelschichtkondensatoren (EDLC), Superkondensatoren(2782)
- Keramische Kondensatoren(833829)
- Kondensatoren-Netzwerke, Arrays(2383)
- Aluminium-Elektrolytkondensatoren(125325)
- Aluminium-Polymer-Kondensatoren(7544)
Relevanter Hersteller






-
Transformatoren
Transformatoren
Relevanter Hersteller







-
Isolatoren
-
Kristalle, Oszillatoren, Resonatoren
Kristalle, Oszillatoren, Resonatoren
Relevanter Hersteller






-
Switches
Switches
- Verriegelungsschalter(2893)
- Emergency-Stop-Schalter (E-Stop)(1160)
- Kabelzugschalter(571)
- Toggle-Schalter(33608)
- Rändelrads Schalter(742)
- Schalter(14263)
- Snap-Aktion, Endschalter begrenzen(28077)
- Slide-Schalter(5166)
- Selector-Schalter(9720)
- Rotary Switches(13850)
- Rocker Schalter(53790)
- Drucktaste-Schalter-Hall-Effekt(127)
- Drucktaste Schalter(190826)
- Programmierbare Display-Switches(39)
- Navigations-Schalter, Joystick(1882)
- Magnetische, Reed-Schalter(1399)
- Keypad-Schalter(637)
- Keylock Schalter(3684)
- DIP Schalter(7747)
- Konfigurierbare Switch-Komponenten-Objektiv(1435)
- Konfigurierbare Schalter-Komponenten-Lichtquelle(1236)
- Konfigurierbare Switch-Komponenten-Contact Block(1401)
- Konfigurierbare Switch-Komponenten-Body(16077)
- Disconnect-Switch-Komponenten(2567)
Relevanter Hersteller






-
Relais
Relais
- Sicherheitsrelais(1310)
- Reedrelais(1735)
- Hochfrequenz (RF) -Relais(1190)
- Schütze (Festkörper)(686)
- Schütze (elektromechanisch)(11952)
- Kfz-Relais(1881)
- Solid State Relais(10652)
- Signal-Relais, bis zu 2 Ampere(9149)
- Relay-Sockets(2075)
- Power Relays, über 2 Ampere(31604)
- E / A-Relaismodule(712)
- I/o-Relay-Module-Input(2)
- I/o-Relay-Modul-Racks(247)
Relevanter Hersteller
















Sprache auswählen
Aktuelle Sprache
Deutsch
- English
- Deutsch
- Italia
- Français
- 日本語
- 한국의
- русский
- Svenska
- Nederland
- español
- Português
- polski
- Suomi
- Gaeilge
- Slovenská
- Slovenija
- Čeština
- Melayu
- Magyarország
- Hrvatska
- Dansk
- românesc
- Indonesia
- Ελλάδα
- Български език
- Afrikaans
- IsiXhosa
- isiZulu
- lietuvių
- Maori
- Kongeriket
- Монголулс
- O'zbek
- Tiếng Việt
- हिंदी
- اردو
- Kurdî
- Català
- Bosna
- Euskera
- العربية
- فارسی
- Corsa
- Chicheŵa
- עִבְרִית
- Latviešu
- Hausa
- Беларусь
- አማርኛ
- Republika e Shqipërisë
- Eesti Vabariik
- íslenska
- မြန်မာ
- Македонски
- Lëtzebuergesch
- საქართველო
- Cambodia
- Pilipino
- Azərbaycan
- ພາສາລາວ
- বাংলা ভাষার
- پښتو
- malaɡasʲ
- Кыргыз тили
- Ayiti
- Қазақша
- Samoa
- සිංහල
- ภาษาไทย
- Україна
- Kiswahili
- Cрпски
- Galego
- नेपाली
- Sesotho
- Тоҷикӣ
- Türk dili
- ગુજરાતી
- ಕನ್ನಡkannaḍa
- मराठी
Diagnose und Fehlersuche bei CAN-Bus-Transceivern
Zeit: 2026/06/10
Durchsuchen: 96
Die CAN-Bus-Kommunikation wird breit in Automobilsystemen, industrieller Automatisierung, Robotik, medizinischen Geräten und eingebetteten Steuerungsnetzwerken eingesetzt. Wenn ein CAN-Bus-Transceiver ausfällt, kann das gesamte Netzwerk Kommunikationsfehler, fehlende Nachrichten, instabile Datenübertragungen oder einen kompletten Busausfall erleben. Die Diagnose dieser Probleme erfordert ein klares Verständnis dafür, wie der Transceiver funktioniert, was häufig zu Ausfällen führt und welche Werkzeuge für genaue Tests benötigt werden.
Katalog
Was ist ein CAN-Bus-Transceiver?
Ein CAN-Bus-Transceiver ist die physikalische Schnittstelle zwischen dem CAN-Controller und dem CAN-Netzwerk. Der CAN-Controller erzeugt Logikpegel-Sende- und Empfangssignale, während der Transceiver diese Signale in differentielle Signale umwandelt, die durch die Leitungen CANH und CANL übertragen werden.
Diese differentielle Signalgebung verbessert die Störsicherheit, da der Empfänger die Spannungdifferenz zwischen CANH und CANL liest, anstatt sich auf eine einzelne Signalleitung zu verlassen. Dies macht die CAN-Kommunikation geeignet für elektrisch rauschende Umgebungen, wie z.B. Fahrzeuge, Fabrikausrüstungen, Motorsteuerungssysteme und schwere Maschinen.
Der Transceiver schützt den Controller auch vor einigen elektrischen Störungen im Bus. Viele moderne CAN-Transceiver beinhalten Funktionen wie Kurzschlussschutz, thermischen Abschaltschutz, stromsparenden Standby-Modus und Schutz gegen elektrostatische Entladung. Diese Schutzfunktionen machen das Gerät jedoch nicht immun gegen Verkabelungsfehler, Überspannung, schlechte Erdung oder starke elektrische Belastungen.
Häufige Ausfallpunkte von CAN-Bus-Transceivern
Ausfälle von CAN-Bus-Transceivern werden häufig durch Probleme in der physikalischen Schicht des Netzwerks verursacht. Dazu gehören Kabel, Steckverbinder, Abschlusswiderstände, Stromversorgungsleitungen, Erdung und äußere elektrische Störungen. Das Verständnis dieser Ausfallpunkte hilft Technikern, das Problem schneller zu lokalisieren, anstatt Teile ohne korrekte Diagnose auszutauschen.
Verkabelungsschäden
Verkabelungsschäden sind eine der häufigsten Ursachen für CAN-Bus-Kommunikationsausfälle. CAN-Kabel können durch Vibration, Hitze, mechanische Bewegung oder schlechte Installation durchtrennt, zerquetscht, verbogen, gestreckt oder abgenutzt werden. In Fahrzeugen und industriellen Systemen sind Kabel oft rauen Betriebsbedingungen ausgesetzt, was im Laufe der Zeit physische Schäden wahrscheinlicher macht.
Ein beschädigter Draht kann einen offenen Stromkreis, Kurzschluss oder eine intermittierende Verbindung verursachen. Wenn CANH oder CANL offen ist, können einige Knoten die Kommunikation einstellen. Wenn CANH und CANL kurzgeschlossen sind, kann das gesamte Netzwerk ausfallen. Wenn eine der Leitungen kurzgeschlossen ist, kann eine abnormale Busspannung auftreten und den Transceiver beschädigen.
Probleme mit Steckverbindern
Steckverbinder sind auch häufige Fehlstellen in CAN-Netzwerken. Lockere Kontakte, verbogene Pins, Korrosion, Feuchtigkeit, Staub und schlechte Crimpverbindungen können die Signalübertragung unterbrechen. Diese Probleme führen möglicherweise nicht immer zu einem permanenten Ausfall. In vielen Fällen funktioniert das Netzwerk zunächst normal, fällt dann jedoch aus, wenn das System vibriert, sich erhitzt oder bewegt.
Fehler bei Steckverbindern sind schwer zu diagnostizieren, da sie oft intermittierende Kommunikationsfehler verursachen. Eine einfache visuelle Überprüfung kann offensichtliche Schäden aufdecken, aber einige Probleme mit Steckverbindern erfordern Kontinuitätstests, Spannungstests oder Signalanalysen mit einem Oszilloskop.
Abschlussfehler
Abschlusswiderstände helfen, die Signalintegrität in einem CAN-Netzwerk aufrechtzuerhalten, indem sie Signalreflexionen entlang des Kommunikationsbusses reduzieren. Wenn das Netzwerk nicht ordnungsgemäß abgeschlossen ist, kann die Kommunikationszuverlässigkeit abnehmen, insbesondere bei höheren Datenraten oder längeren Kabellängen. Häufige Symptome sind verzerrte Signale, erhöhte Kommunikationsfehler, intermittierender Datenverlust und instabile Netzwerkoperationen.
Probleme mit der Stromversorgung
Ein CAN-Transceiver benötigt eine stabile Versorgungsspannung, um korrekt zu funktionieren. Wenn die Versorgungsspannung zu niedrig, geräuschbehaftet oder instabil ist, kann der Transceiver zurückgesetzt werden, das Senden einstellen oder unzuverlässige Signale erzeugen. Spannungseinbrüche können auftreten, wenn die Stromversorgung überlastet, der Kabelwiderstand zu hoch oder die Erdung schlecht ist.
Überspannung und Spannungsspitzen können ebenfalls den Transceiver beschädigen. Diese Probleme können von Lastumschaltungen, induktiven Geräten, Starthilfereignissen, schlechten Schutzschaltungen oder falscher Verkabelung herrühren. In einigen Fällen kann der Transceiver noch teilweise funktionieren, aber abnormale Spannungspegel oder häufige Kommunikationsfehler erzeugen.
Elektromagnetische Störungen
Elektromagnetische Störungen (EMI) werden durch Geräte wie Motoren, Relais, wechselrichter, Schaltnetzteile und andere Hochstromgeräte erzeugt. Übermäßige EMI kann die CAN-Bus-Signale stören und die Kommunikationszuverlässigkeit verringern. In schweren Fällen kann die Störung Kommunikationsfehler, beschädigte Nachrichten oder vorübergehenden Verlust der Netzwerkverbindung verursachen.
Symptome eines fehlerhaften CAN-Bus-Transceivers
Ein defekter CAN-Bus-Transceiver kann je nach Art und Schwere des Fehlers verschiedene Kommunikationsprobleme verursachen. Ein häufiges Symptom ist die intermittierende Kommunikation, bei der Nachrichten manchmal erfolgreich übertragen und manchmal verloren gehen. Dies kann auf schwache Signalpegel, schlechte Verbindungen, Verkabelungsfehler oder einen Transceiver zurückzuführen sein, der aufgrund von Hitze, Vibration oder elektrischem Stress instabil wird.
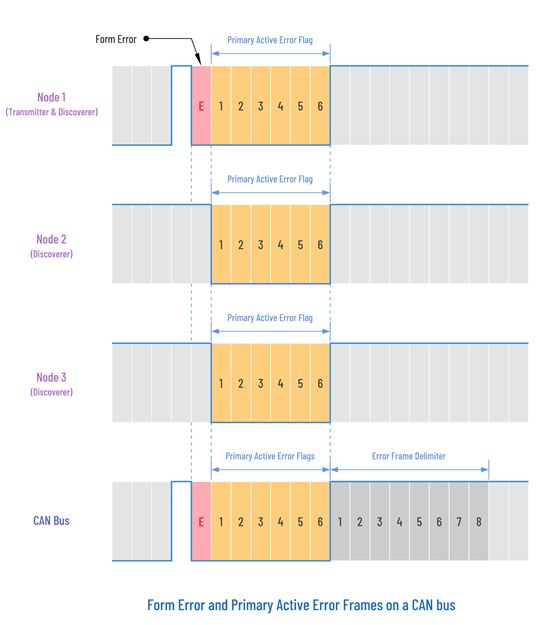
Ein weiteres häufiges Symptom ist ein Anstieg der CAN-Kommunikationsfehler. Wie in der untenstehenden Abbildung gezeigt, erzeugt ein Knoten, der ein Problem wie einen Formfehler erkennt, ein Fehlerrahmen, um andere Knoten im Netzwerk zu benachrichtigen. Wiederholte Fehlerrahmen zeigen an, dass Nachrichten nicht korrekt gesendet oder empfangen werden. Wenn diese Fehler weiterhin zunehmen, kann der betroffene Knoten in einen Fehlerpassivzustand oder schließlich in einen Bus-Aus-Zustand eintreten, in dem er aufhört zu senden, um weitere Störungen der Netzwerkkommunikation zu verhindern.
Ein defekter Transceiver kann auch abnormale CANH- und CANL-Spannungspegel verursachen. Der Bus kann in einem dominanten Zustand stecken bleiben, inaktiv bleiben oder Spannungspegel außerhalb des erwarteten Betriebsbereichs erzeugen. Diese Bedingungen können zu beschädigten Nachrichten, Kommunikationszeitüberschreitungen und Netzwerkinstabilität führen. In Fahrzeugen können solche Fehler Diagnosestörcodes (DTCs), Warnanzeigen oder Kommunikationsverluste mit elektronischen Steuergeräten (ECUs) auslösen. In industriellen Systemen können sie Steuerungsalarme, Maschinenfehler oder fehlende Sensordaten verursachen.
Physische Anzeichen eines Fehlers können manchmal ebenfalls beobachtet werden. Ein beschädigter Transceiver kann überhitzen, Brandspuren entwickeln oder sichtbare Gehäuseschäden aufweisen. Viele Transceiver-Fehler hinterlassen jedoch keine sichtbaren Beweise, weshalb elektrische Tests und Signalanalysen für eine genaue Diagnose unerlässlich sind.
Werkzeuge zur Diagnose des CAN-Busses
Eine genaue Diagnose des CAN-Busses erfordert die richtigen Werkzeuge. Eine visuelle Inspektion kann offensichtliche Probleme finden, aber elektrische und Kommunikationstests sind erforderlich, um den tatsächlichen Fehler zu bestätigen. Die nützlichsten Werkzeuge sind ein Multimeter, ein Oszilloskop, ein CAN-Bus-Analyzer und Diagnosesoftware.
Multimeter
Ein digitales Multimeter wird für grundlegende elektrische Tests verwendet. Es kann Widerstand, Spannung, Kontinuität und Kurzschlüsse zu Erde oder Strom messen. Einer der wichtigsten Tests mit dem Multimeter ist die Messung des Widerstands zwischen CANH und CANL bei abgeschaltetem System. Ein gesundes Hochgeschwindigkeits-CAN-Netzwerk misst normalerweise etwa 60 Ohm.
Ein Multimeter kann auch die Versorgungsspannung am Transceiver, die Erdungsqualität und anormale Spannungen an den Busleitungen überprüfen. Allerdings kann ein Multimeter keine schnellen Signaländerungen, Rauschen, Überschwinger oder Verzerrungen von Wellenformen anzeigen. Für tiefere Signalanalysen ist ein Oszilloskop erforderlich.
Oszilloskop
Ein Oszilloskop ist eines der effektivsten Werkzeuge zur Bewertung der CAN-Signalqualität. Es zeigt die tatsächlichen CANH- und CANL-Wellenformen an und hilft, Rauschen, Signalreflexionen, Spannungsspitzen, Überschwinger und andere Probleme der Signalintegrität zu identifizieren, die die Netzwerkkommunikation beeinträchtigen können.
CAN-Bus-Analysator
Ein CAN-Bus-Analysator überwacht und decodiert die Kommunikationsdaten im Netzwerk. Er kann CAN-Identifikatoren, Datenrahmen, Fehlerrahmen, Buslast, Nachrichtenzeitpunkte und Kommunikationsaktivitäten zwischen Knoten anzeigen. Dies macht ihn nützlich, um fehlende Nachrichten, wiederholte Fehler, falsche Baudraten oder fehlerhafte Knoten zu finden.
Im Gegensatz zu einem einfachen Multimeter hilft ein CAN-Analysator, Kommunikationsprobleme auf der Ebene der Kommunikation zu identifizieren. Er ist besonders nützlich, wenn die physikalische Verkabelung normal aussieht, aber das Netzwerk dennoch Fehler aufweist. Einige Analysatoren unterstützen auch CAN FD, Protokollaufzeichnung, Filtern und Protokolldecodierung.
Diagnosesoftware
Diagnosesoftware wird häufig in der Automobil- und Industriewelt verwendet, um Fehlermeldungen auszulesen, Live-Daten zu überwachen und den Kommunikationsstatus zu überprüfen. Sie kann anzeigen, ob ein Modul online, offline oder CAN-bezogene Fehler meldet. Einige Software kann auch Fehlerzähler, Bus-off-Bedingungen und Kommunikationsprotokolle anzeigen.
Der Nutzen von Diagnosesoftware hängt von der Systemkompatibilität ab. Automobilwerkzeuge können Diagnoseschwierigkeiten von Steuergeräten lesen, während industrielle Werkzeuge die Kommunikation von Steuerungen und die Aktivität des Feldbusses überwachen können. Diagnosesoftware ist am effektivsten, wenn sie zusammen mit elektrischen Tests und Wellenformanalysen verwendet wird.
Schritt-für-Schritt CAN-Bus-Diagnoseverfahren
Ein systematischer Diagnoseprozess hilft, Rätselraten zu vermeiden. CAN-Bus-Probleme sollten zuerst von den einfachsten physischen Problemen überprüft werden, bevor man zur fortgeschrittenen Signal- und Kommunikationsanalyse übergeht. Dies verhindert unnötigen Austausch von Transceivern, Steuerungen oder Modulen.
Sichtprüfung
Überprüfen Sie Kabel, Stecker und Transceiver-Pakete auf physikalische Schäden, Korrosion, lockere Verbindungen, Überhitzung oder Kontamination. Viele CAN-Netzwerkfehler stammen von einfachen mechanischen Problemen, die durch eine sorgfältige Sichtprüfung identifiziert werden können.
Elektrische Messungen
Verwenden Sie ein Multimeter, um den Abschlusswiderstand, die Versorgungsspannung und die Spannungsebene des CAN-Busses zu überprüfen. Ein ordnungsgemäß abgeschlossener Hochgeschwindigkeits-CAN-Bus misst typischerweise etwa 60 Ω zwischen CANH und CANL, wenn er ausgeschaltet ist. Spannungsmessungen können auch helfen, Kurzschlüsse, Unterbrechungen, Erdungsprobleme und Spannungsversorgung zu identifizieren, die den Betrieb des Transceivers beeinträchtigen können.
Signalanalyse
Verwenden Sie ein Oszilloskop, um die Wellenformen von CANH und CANL zu überprüfen. Die Signalanalyse hilft, Verzerrungen der Wellenform, Rauschen, Signalreflexionen, Spannungsspitzen und andere Probleme zu identifizieren, die die Kommunikationsqualität beeinträchtigen können.
Kommunikationsanalyse
Verwenden Sie einen CAN-Bus-Analysator oder Diagnosesoftware, um den Netzwerkverkehr zu überwachen, Fehlerräume zu überprüfen, die Kommunikationsaktivität zu analysieren und Knoten zu identifizieren, die Fehler verursachen könnten.
Komponentenverifizierung
Wenn ein Transceiver als fehlerhaft angesehen wird, vergleichen Sie sein Verhalten mit einem bekannten funktionierenden Gerät oder testen Sie ihn in einem verifizierten Netzwerk. Dies hilft zu bestätigen, ob der Fehler vom Transceiver oder einem anderen Teil des Systems ausgeht.
Wichtige Spezifikationen, die vor dem Austausch zu beachten sind
• Versorgungsspannung - Wählen Sie einen CAN-Bus-Transceiver, der mit der Systemspannung übereinstimmt. Viele Hochgeschwindigkeits-CAN-Netzwerke verwenden 5 V, während einige eingebettete Systeme 3,3 V verwenden. Die Verwendung der falschen Spannungsbewertung kann zu instabiler Kommunikation oder Geräteschäden führen.
• Datenrate - Überprüfen Sie die maximal unterstützte Kommunikationsgeschwindigkeit. Standard-Hochgeschwindigkeits-CAN unterstützt üblicherweise bis zu 1 Mbps, während CAN FD-Transceiver schnellere Datenphasengeschwindigkeiten unterstützen. Verwenden Sie einen CAN FD-Transceiver, wenn das Netzwerk CAN FD verwendet.
• CAN FD Unterstützung - CAN FD ist erforderlich, wenn das System schnellere Datenübertragungen und größere Nachrichteninhalte benötigt. Den Austausch eines CAN FD-Transceivers durch einen Standard-CAN-Transceiver kann Kommunikationsfehler verursachen.
• Betriebstemperaturbereich - Wählen Sie einen Transceiver, der mit der tatsächlichen Arbeitsumgebung umgehen kann. Automobil- und industrielle Systeme benötigen oft breitere Temperaturbereiche, da sie Hitze, Kälte, Vibration und lange Betriebszeiten ausgesetzt sind.
• ESD- und Überspannungsschutz - Guter Schutz hilft dem Transceiver, elektrostatische Entladungen, Spannungsspitzen und rauen elektrischen Bedingungen zu überstehen. Dies ist wichtig in der Automobil-, Industrie- und Freiluftanwendungen.
• Kurzschlussschutz - Dies schützt das Gerät, wenn CANH oder CANL versehentlich kurzgeschlossen werden, und zwar gegen Erde, Versorgungsspannung oder untereinander. Es hilft, das Risiko einer dauerhaften Beschädigung zu verringern.
• Pin-Kompatibilität - Vergleichen Sie immer die Datenblätter, bevor Sie einen CAN-Transceiver ersetzen. Ähnliche Bauteile können unterschiedliche Standby-, Ruhemodus-, Aktivierungs- oder Versorgungspins haben. Falsche Pin-Verbindungen können die Schaltung beschädigen.
• Niedrigstrom- oder Standby-Modus - Dies ist nützlich für batteriebetriebene Systeme oder Fahrzeuge, die einen niedrigen Stromverbrauch benötigen, wenn die Kommunikation inaktiv ist.
Bevor Sie einen CAN-Bus-Transceiver ersetzen, vergewissern Sie sich, dass das Ersatzgerät den ursprünglichen Entwurfsanforderungen entspricht. Wichtige Faktoren sind die Versorgungsspannung, die unterstützte Datenrate, die CAN FD-Kompatibilität, der Betriebstemperaturbereich, die Schutzeigenschaften und die Pin-Konfiguration. Wenn die zugrunde liegende Ursache des Ausfalls nicht behoben wird, kann auch der Ersatztransceiver ausfallen.
Präventive Wartung für CAN-Bus-Netzwerke
Präventive Wartung hilft, CAN-Bus-Ausfälle zu reduzieren und die Kommunikation über die Zeit stabil zu halten. Empfohlene Praktiken sind:
• Überprüfen Sie regelmäßig Kabel auf Schnitte, Abrieb, Quetschungen, übermäßiges Biegen oder Hitzeschäden.
• Überprüfen Sie Anschlüsse auf lose Kontakte, verbogene Pins, Korrosion, Feuchtigkeit, Staub oder schlechte Crimpverbindungen.
• Überprüfen Sie Erdungspunkte, um saubere, sichere und niederohmige Verbindungen sicherzustellen.
• Beheben Sie kleine physische Probleme frühzeitig, um intermittierende Kommunikationsfehler oder einen vollständigen Netzwerkfehler zu vermeiden.
• Verwenden Sie verdrillte CAN-Kabel, um die Störfestigkeit und Signalintegrität zu verbessern.
• Führen Sie CAN-Kabel von stromführenden Leitungen, Motoren, Relais, Wechselrichtern und Schaltnetzteilen weg.
• Verwenden Sie abgeschirmte CAN-Kabel in Umgebungen mit hoher elektromagnetischer Interferenz (EMI).
• Installieren Sie Abschlusswiderstände nur an den beiden Enden des CAN-Busses und überprüfen Sie die ordnungsgemäße Abschluss während der Wartung.
• Stellen Sie eine stabile Stromversorgung sicher und schützen Sie Transceiver vor Spannungsspitzen, Spannungseinbrüchen und übermäßigen Welligkeiten.
• Stellen Sie eine ordnungsgemäße Erdung sicher, um gemeinsame Modusgeräusche und unerwünschte Spannungsunterschiede zwischen den Knoten zu reduzieren.
• Verwenden Sie Überspannungsschutz, ESD-Schutz und industrielle Komponenten in rauen Betriebsumgebungen.
• Messen Sie periodisch den Widerstand zwischen CANH und CANL, um die Netzwerkintegrität zu überprüfen.
• Überprüfen Sie die CAN-Bus-Spannungspegel, um Kurzschlüsse, Unterbrechungen oder strombezogene Probleme zu erkennen.
• Verwenden Sie ein Oszilloskop, um die CANH- und CANL-Wellenformen auf Geräusche, Übersprechen, Reflexionen oder Signalverzerrungen zu untersuchen.
• Überwachen Sie den CAN-Verkehr mit einem CAN-Analyzer oder Diagnosesoftware, um sich entwickelnde Kommunikationsprobleme zu identifizieren, bevor ein Netzwerkfehler auftritt.
Fazit
CAN-Bus-Transceiver-Ausfälle sollten nicht sofort durch den Austausch von Teilen diagnostiziert werden. Viele Probleme stammen von Kabelschäden, schlechten Anschlüssen, falschen Abschlüssen, instabiler Stromversorgung oder EMI. Ein schrittweiser Prozess, der visuelle Inspektion, elektrische Tests, Wellenanalyse und CAN-Überwachung nutzt, hilft, den tatsächlichen Fehler schneller zu finden. Bei ordnungsgemäßer Installation, richtiger Bauteilwahl und routinemäßiger Wartung können CAN-Netzwerke zuverlässig bleiben und unerwartete Ausfallzeiten reduzieren.
Häufig gestellte Fragen [FAQ]
1. Kann ein defekter CAN-Bus-Transceiver andere Geräte im Netzwerk beschädigen?
Ein defekter Transceiver kann manchmal andere Knoten beeinträchtigen, indem er falsche Busspannungen zwingt, Kommunikationsfehler erzeugt oder das Netzwerk in instabile Betriebsbedingungen versetzt. Schwere elektrische Fehler können außerdem angeschlossene Geräte belasten.
2. Warum fällt ein CAN-Netzwerk manchmal nur aus, wenn die Geräte warm werden?
Wärme kann bestehende Probleme wie gebrochene Lötstellen, beschädigte Anschlüsse, alternde Bauteile oder einen Transceiver mit internen Defekten verschärfen. Die Kommunikation kann bei kühlen Temperaturen normal erscheinen und nach Erreichen der Betriebstemperatur versagen.
3. Kann ein CAN-Bus-Transceiver ausfallen, ohne Diagnosestörungenscodes (DTCs) auszulösen?
Ja. Einige Ausfälle verursachen nur intermittierende Kommunikationsprobleme oder gelegentliche Nachrichtenbeschädigungen, die möglicherweise nicht sofort einen Fehlermeldungscode erzeugen, aber trotzdem die Systemleistung beeinträchtigen können.
4. Wie kann eine übermäßige Kabellänge die CAN-Bus-Kommunikation beeinflussen?
Wenn die Kabellänge das empfohlene Limit für die gewählte Datenrate überschreitet, können Signalreflexionen und Timingprobleme auftreten, was das Risiko von Kommunikationsfehlern und Datenverlust erhöht.
5. Warum ist das verdrillte Kabel in einem CAN-Netzwerk wichtig?
Twisted-Pair-Verkabelung hilft, elektromagnetische Interferenzen zu reduzieren, indem sichergestellt wird, dass sowohl CANH als auch CANL ähnlichen externen Störungen ausgesetzt sind, was die Kommunikationszuverlässigkeit verbessert.
6. Können falsche CAN-Bus-Baudraten einen Transceiver-Ausfall nachahmen?
Ja. Knoten, die mit inkompatiblen Baudraten konfiguriert sind, können möglicherweise nicht richtig kommunizieren, was Symptome hervorruft, die einem defekten Transceiver ähneln, einschließlich Fehlerrahmen und fehlenden Nachrichten.
7. Was passiert, wenn nur ein Abschlusswiderstand in einem CAN-Netzwerk installiert ist?
Das Netzwerk kann in einigen Situationen weiterhin kommunizieren, aber die Signalqualität kann erheblich abfallen, was die Wahrscheinlichkeit von Reflexionen, Kommunikationsfehlern und instabiler Funktion erhöht.
8. Ist der Austausch des Transceivers immer die beste Lösung, wenn die CAN-Kommunikation ausfällt?
Nein. Viele Probleme mit dem CAN-Bus entstehen durch Verkabelungsfehler, Erdungsprobleme, Beschädigungen von Steckverbindern, Instabilität der Stromversorgung oder Abschlussfehler. Eine ordnungsgemäße Diagnose sollte abgeschlossen werden, bevor Komponenten ausgetauscht werden.
Verwandter Artikel
-
![INA226 Stromshunt- und Leistungsmess-IC für präzise Leistungsüberwachung]() Jun 11 2026
Jun 11 2026 -
![Wie funktioniert der JRC4558 Operationsverstärker?]() Jun 10 2026
Jun 10 2026


Verwandte -Produkte

C1005JB1E105K050BC
CAP CER 1UF 25V JB 0402

EMK105F473ZV-F
CAP CER 0.047UF 16V Y5V 0402

GRM1885C1H4R8CZ01D
CAP CER 4.8PF 50V C0G/NP0 0603

ADS1114IDGSR
IC ADC 16BIT SIGMA-DELTA 10VSSOP

BQ51014YFPR
IC WIRELESS PWR RCVR 28DSBGA

GAL16LV8D-3LJ
GAL16LV8D-3LJ LATTICE

MIC2212-LOBML
MICREL FBGA-10

BSZ0909NS
BSZ0909NS INFINEO
SI9100DJ
SI9100DJ SI
BU30TD3WG-GTR
BU30TD3WG-GTR V
CXK58257M-70L
SONY SOP28

IDT92HD73E1X5PRG
IDT92HD73E1X5PRG IDT

MGS151212
DC DC CONVERTER 12V