Alle Kategorien
-
Integrierte schaltkreise (ICS)
Integrierte schaltkreise (ICS)
- Schnittstelle - Sensor, kapazitive Berührung(642)
- Spezialisierte ICS(12302)
- PMIC-Spannungsregler-besonderer Zweck(5644)
- PMIC-Spannungsregler-lineare Regler(793)
- PMIC-Spannungsregler-linear + Switching(1829)
- PMIC-Spannungsregler-linear(70981)
- PMIC-Spannungsregler-DC DC Switching Regulators(39569)
- PMIC-Regler-DC-DC-Switching-Controller(13507)
- PMIC-Spannungs-Referenz(9453)
- PMIC-v/f und f/v-Wandler(145)
- PMIC-Thermal Management(592)
- PMIC-Supervisor(47946)
- PMIC-RMS bis DC-Wandler(170)
- PMIC-Netzteil-Controller, Monitore(2104)
- PMIC-Power over Ethernet (PoE) Controller(1008)
- PMIC-Power Management-spezialisierte(7722)
- PMIC-Netzschalter, Treiber laden(7706)
- PMIC-PFC (Power Factor Correction)(1222)
- PMIC oder Steuerungen, ideale Dioden(705)
- PMIC-Motor-Treiber, Regler(4712)
- PMIC-Beleuchtung, Ballast-Regler(560)
- PMIC-LED-Treiber(7282)
- PMIC-Laser-Treiber(573)
- PMIC-Hot-Swap-Controller(2816)
- PMIC-Gate-Treiber(7083)
- PMIC-voll, Half-Bridge-Treiber(1342)
- PMIC-Energy Messung(654)
- PMIC-Display-Treiber(1435)
- PMIC-derzeitige Regulierung/Management(1481)
- PMIC-Batterie-Management(5553)
- PMIC-Ladegeräte(3831)
- PMIC-AC DC Konverter, Offline Schalter(4905)
- Memory-Controller(358)
- Memory-Konfigurations-Proms für FPGAs(639)
- Speicher-Akkus(13)
- Erinnerung(65694)
- Logic-universelle Bus-Funktionen(706)
- Logic-Übersetzer, Level-Shifter(2854)
- Logik-Specialty Logic(1870)
- Logik-Signal-Schalter, Multiplexer, Decoder(9420)
- Logic-Shift-Register(2665)
- Logic-Parity Generatoren und Checkers(335)
- Logic-multivibratoren(831)
- Logik-Latches(3658)
- Logik - Tore und Wechselrichter - Multifunktion, konfigurierbar(1687)
- Logik-Tore und Wechselrichter(16453)
- Logic-Flip Flops(7780)
- Logik-FIFOs Speicher(4240)
- Logik-Zähler, Trennlinien(3456)
- Logik-Vergleichsoperator(592)
- Logik-Puffer, Treiber, Receiver, Transceiver(17835)
- Linear-Video-Verarbeitung(2909)
- Linear-Vergleichsoperator(5084)
- Linear-analoge Multiplikatoren, Trennwände(263)
- Linear-Verstärker-Video Amps und Module(1905)
- Linear-Verstärker-Spezial-Zweck(1856)
- Linear - Verstärker - Instrumentierung, OP -Verstärker, Pufferverstärker(34236)
- Linear-Verstärker-Audio(4567)
- Interface-Voice Record und Playback(556)
- Schnittstelle - UARTs (Universal Asynchronous Receivers -Sender)(1237)
- Schnittstelle-Telecom(4467)
- Interface-spezialisierte(4833)
- Interface-Signal Terminatoren(333)
- Interface-Signal-Puffer, Repeater, Splitter(1449)
- Interface-Serializer, Deserializer(1480)
- Schnittstellen-Sensor und Detektor-Interfaces(1524)
- Interface-Module(169)
- Interface-Modems-ICS und Module(407)
- Interface-e/a-Expander(1136)
- Interface-Filter-aktiv(1226)
- Interface-Encoder, Decoder, Konverter(714)
- Interface-Treiber, Receiver, Transceiver(20755)
- Interface-Direct Digital Synthesis (DDS)(117)
- Interface-Controller(3628)
- Interface-Codecs(1676)
- Schnittstelle - Analoge Switches, Multiplexer, Demultiplexer(12567)
- Schnittstelle-analoge Schalter-spezieller Zweck(2533)
- Embedded-System on Chip (SoC)(4496)
- Embedded-PLDs (programmierbare Logik-Vorrichtung)(971)
- Embedded-Mikroprozessoren(10083)
- Embedded-Mikrocontroller-anwendungsspezifische(2275)
- Embedded-Mikrocontroller(99285)
- Eingebettet - Mikrocontroller, Mikroprozessor, FPGA -Module(1527)
- Eingebettet - FPGAs (Feldprogrammiergate -Array) mit Mikrocontrollern(81)
- Embedded-FPGAs (Field Programmable Gate Array)(27747)
- Embedded-DSP (Digital Signal Processors)(4081)
- Eingebettet - CPLDs (komplexe programmierbare Logikgeräte)(5187)
- Datenerfassung-Touch Screen Controller(1210)
- Datenerfassung-Digital to Analog Converter (DAC)(14419)
- Datenerfassung-digitale Potentiometer(6250)
- Datenerfassung-analog zu Digital Converters (ADC)(17776)
- Datenerfassung-analoges Frontend (AFE)(787)
- Datenerfassung-MDE/DACs-spezieller Zweck(3043)
- Clock/Timing-Uhren in Echtzeit(2446)
- Uhr/Timing - programmierbare Timer und Oszillatoren(23469)
- Clock/Timing-IC-Akkus(4)
- Takt/Timing-Delay Lines(1049)
- Uhr/Timing - Uhrengeneratoren, PLLS, Frequenzsynthesizer(32775)
- Clock/Timing-Clock Puffer, Treiber(4568)
- Clock/Timing-anwendungsspezifische(8652)
- Audio Spezial-Zweck(1564)
Relevanter Hersteller







-
Diskrete Halbleiter-Produkte
Diskrete Halbleiter-Produkte
- Aktuelle Regulierung - Dioden, Transistoren(1090)
- Transistoren-besonderer Zweck(226)
- Transistoren-programmierbare Unijunction(48)
- Transistoren-jfets(1558)
- Transistoren-IGBTs-Einzel(4799)
- Transistoren-IGBTs-Module(63420)
- Transistoren-IGBTs-Arrays(26)
- Transistoren-FETs, MOSFETs-Einzel(48330)
- Transistoren-FETs, MOSFETs-RF(4903)
- Transistoren-FETs, MOSFETs-Arrays(6641)
- Transistoren-Bipolar (BJT)-einzeln, Pre-biased(4539)
- Transistoren-Bipolar (BJT)-Einzel(25800)
- Transistoren-Bipolar (BJT)-RF(2087)
- Transistoren-bipolare (BJT)-Arrays, Pre-biased(2115)
- Transistoren-bipolare (BJT)-Arrays(2310)
- Thyristor-triacs(4044)
- Thyristoren-SCRs-Module(3967)
- Thyristoren-SCRs(5436)
- Thyristoren-diacs, sidacs(319)
- Power Driver Module(1627)
- Dioden-zenerdioden-Einzel(87483)
- Dioden-zenerdioden-Arrays(2619)
- Dioden - variable Kapazität (Varik, Varaktoren)(1200)
- Dioden-RF(2753)
- Dioden-Gleichrichter-Einzel(67528)
- Dioden-Gleichrichter-Arrays(20581)
- Dioden-Brücke-Gleichrichter(11700)
Relevanter Hersteller




-
RF/if und RFID
RF/if und RFID
- SIM -Karten für Abonnenten -Identifikationsmodul (SIM)(77)
- RF -Zirkulatoren und Isolatoren(1742)
- RFID, RF-Zugang, Monitoring-ICS(1550)
- RFID Transponder, Tags(747)
- RFID Lesegeräte(464)
- RFID -Bewertungs- und Entwicklungskits, Boards(30)
- RFID Antennen(329)
- RFI und EMI - Abschirm- und Absorbungsmaterialien(6444)
- HF und EMI-Kontakte, Fingerstock und Dichtungen(7497)
- RF Transmitter(668)
- RF Transceiver Module(6900)
- RF-Transceiver ICS(4169)
- HF-Schalter(9276)
- RF Shields(16401)
- HF-Receiver(1998)
- HF -Empfänger, Sender und Transceiver -Einheiten(2763)
- RF Power Divider/Splitter(1223)
- RF Power Controller ICs(86)
- HF-Modulatoren(710)
- HF-Mixer(2800)
- RF misc ICS und Module(3276)
- HF-Front-End (LNA + PA)(419)
- RF -Bewertungs- und Entwicklungskits, Boards(747)
- HF-gerichtete Kupplung(2718)
- RF Diplexer(1464)
- RF-Detektoren(412)
- RF-Demodulatoren(249)
- HF-Antennen(12319)
- HF-Verstärker(19651)
- Balun(1496)
- Dämpfungsglieder(4852)
Relevanter Hersteller







-
Optoelektronik
Optoelektronik
- Optomechanisch(480)
- Leuchten(125)
- Laserdioden, Lasermodule - Laserlieferung, Laserfasern(345)
- Hene Lasersysteme(31)
- Hene Laserköpfe(27)
- Hintergrundbeleuchtung anzeigen(93)
- Xenon-Beleuchtung(387)
- Touchscreen-Overlays(453)
- Panel Indicators, Pilot Lights(75729)
- Optik-Remote-Phosphor-Lichtquelle(269)
- Optik-Reflektoren(665)
- Optik-leichte Rohre(5384)
- Optik-Objektive(4951)
- LEDs-Spacer, Unentschieden(2718)
- LEDs-Lamp-Ersetzungen(29718)
- LEDs - Leiterplattenindikatoren, Arrays, Lichtstäbe, Balkendiagramme(9083)
- LED-thermische Produkte(667)
- LED-Beleuchtung(64)
- LED-Beleuchtung-weiß(37580)
- LED-Beleuchtung-Farbe(4728)
- LED-Beleuchtung-Maiskolben, Motoren, Module(28735)
- LED-Anzeige-diskret(27601)
- Laserdioden, Module(1553)
- Lampen-Glühlampen, Neons(311004)
- Lampen-Kälte-Fluoreszenz (KKL) & UV(164)
- Wechselrichter(7728)
- Infrarot, UV, sichtbare Strahler(3871)
- Fiber Optics-Transmitter-Antrieb integriert(4085)
- Fiber Optics-Transmitter-diskrete(350)
- Fiber Optics-Transceiver Module(18758)
- Fiberoptik-Switches, Multiplexer, Demultiplexer(1387)
- Fiberoptik-Receiver(695)
- Fiberoptik-Dämpfung(654)
- Elektrolumineszenz(102)
- Display, Monitor-Interface Controller(98)
- Display-Module-Vakuum-Leuchtstofflampen (VFD)(249)
- Module anzeigen-LED Dot Matrix und Cluster(865)
- Display-Module-LED-Zeichen und numerische(5421)
- Display-Module-LCD, OLED, Graphic(4654)
- Display-Module-LCD, OLED-Zeichen und numerische(2202)
- Display-Blenden, Objektive(88)
- Adresse, Spezialität(458)
Relevanter Hersteller







-
Sensoren, Wandler
Sensoren, Wandler
- Ultraschallempfänger, Sender - Industrial(115)
- Temperatursensoren - Thermostate - Mechanisch - Industrielles(3103)
- Temperatursensoren - Analog und digitaler Ausgang - Industrial(209)
- Näherungssensoren - Industrial(13611)
- Drucksensoren, Wandler - Industrie(26503)
- Optische Sensoren - Photonik - Zähler, Detektoren, SPCM (Einzelphotonzählmodul)(751)
- Optische Sensoren - Kameramodule(875)
- Magnetsensoren - Position, Nähe, Geschwindigkeit (Module) - Industrie(554)
- Kraftsensoren - Industrial(346)
- Flusssensoren - Industrielles(151)
- Float, Level Sensoren - Industrial(310)
- Encoder - Industrial(4980)
- Farbsensoren - Industrial(50)
- Berührungssensoren(100)
- Ultraschall-Receiver, Transmitter(2421)
- Temperatursensoren-Thermostat-Solid State(1096)
- Temperatursensoren-Thermostate-mechanisch(3397)
- Temperatursensoren - Thermoelemente, Temperatursonden(1921)
- Temperatursensoren - RTD (Widerstandstemperaturdetektor)(1525)
- Temperatursensoren-PTC-Thermistoren(2273)
- Temperatursensoren-ntc-thermistoren(13259)
- Temperatursensoren-Analog und Digital Output(3928)
- DMS(1399)
- Spezialisierte Sensoren(1861)
- Solarzellen(503)
- Schock-Sensoren(84)
- Sensor-Interface-Junction-Blöcke(2519)
- Sensor-Kabel-Baugruppen(22011)
- Proximity/Belegung Sensoren-fertige Einheiten(725)
- Näherungsschalter(2860)
- Drucksensoren, Wandler(11317)
- Positionssensoren - Winkel, lineare Positionsmessung(6022)
- Optische Sensoren-reflektierende-Logik-Ausgang(194)
- Optische Sensoren - reflektierend - analoge Ausgang(432)
- Optische Sensoren-Phototransistoren(1027)
- Optische Sensoren - Photointerrupter - Schlitztyp - Transistorausgang(1427)
- Optische Sensoren - Photointerrupter - Schlitztyp - Logikausgabe(1215)
- Optische Sensoren-Lichtschranke, Industrial(16763)
- Optische Sensoren-Photodioden(1543)
- Optische Sensoren-Foto-Detektoren-Remote Receiver(2605)
- Optische Sensoren-Foto-Detektoren-Logik-Ausgang(146)
- Optische Sensoren-Foto-Detektoren-CDs-Zellen(74)
- Optische Sensoren-Distanz-Messung(377)
- Optische Sensoren-Ambient Light, IR, UV Sensoren(1305)
- Multifunktions(558)
- Motion Sensors-Vibration(337)
- Motion Sensors-Tilt Schalter(67)
- Bewegungsmelder-optisch(719)
- Motion Sensors-Neigungssensoren(175)
- Motion Sensors-Imus (Trägheit-Maßeinheiten)(416)
- Motion Sensors-Kreisel(214)
- Motion Sensors-Beschleunigungsmesser(1911)
- Magnete-Sensor abgestimmt(119)
- Magnete-Multi Purpose(1965)
- Magnetische Sensoren-Schalter (Solid State)(3700)
- Magnetsensoren - Position, Nähe, Geschwindigkeit (Module)(5199)
- Magnetische Sensoren-linear, Kompass (ICS)(1247)
- Magnetsensoren - Kompass, Magnetfeld (Module)(35)
- LVDT -Wandler (linearer variabler Differentialtransformator)(204)
- IrDA Transceiver-Module(196)
- Bildsensor, Kamera(2235)
- Feuchtigkeit-Sensoren(1425)
- Gas-Sensoren(1217)
- Force Sensoren(188)
- Durchfluss-Sensoren(550)
- Float, Level Sensoren(1343)
- Encoder(6357)
- Staub-Sensoren(43)
- Aktuelle Wandler(3455)
- Color Sensoren(85)
- Verstärker(1905)
Relevanter Hersteller







-
Anschlüsse, Verbindungen
Anschlüsse, Verbindungen
- USB, DVI, HDMI -Stecker(446)
- Festkörperbeleuchtungsstecker(555)
- Steckdosen für ICs, Transistoren(953)
- Steckbare Steckverbinder(1221)
- Photovoltaik (Solarpanel) Anschlüsse(136)
- Glasfaseranschlüsse(370)
- FFC, FPC (flache flexible) Anschlüsse(761)
- D-Sub, D-förmige Stecker(2887)
- Koaxialverbinder (RF)(2389)
- Rundanschlüsse(14162)
- Stromanbeter Blade Type(273)
- Stecker und Behälter(2597)
- USB, DVI, HDMI Stecker-Adapter(572)
- USB, DVI, HDMI -Stecker(4298)
- Klemmen-Wire to Board Steckverbinder(217)
- Klemmen-Draht-Steckverbinder(4322)
- Klemmen-Draht-Pin Stecker(328)
- Terminals-Revolver Steckverbinder(1273)
- Terminals-spezialisierte Steckverbinder(2042)
- Klemmen-Spaten Verbinder(3902)
- Klemmen-Löten/Stecker(345)
- Klemmen-Verschraubungen(745)
- Klemmen-Ring Steckverbinder(12596)
- Klemmen-rechteckige Steckverbinder(4747)
- Terminals - Schnellverbindungen, schnelle Trennungsanschlüsse(8514)
- Klemmen-PC PIN, Single Post Connectors(3776)
- Klemmen-PC-Pin-Buchsen, Sockel-Steckverbinder(5883)
- Klemmen-magnetische Draht-Steckverbinder(1653)
- Klemmen-Messer Steckverbinder(112)
- Klemmen-Gehäuse, Stiefel(2850)
- Klemmen-Folie Steckverbinder(108)
- Klemmen-Barrel, Bullet-Steckverbinder(1107)
- Klemmen-Adapter(137)
- Terminal-Streifen und Revolver-Boards(1159)
- Terminal Junction Systeme(2533)
- Anschlussblöcke-Draht an Bord(43615)
- Terminal Blocks-spezialisierte(3722)
- Terminal Blocks-Power Distribution(847)
- Anschlussblöcke-Panel Mount(1359)
- Terminal Blocks-Interface Module(1819)
- Anschlussblöcke-Kopfzeilen, Stecker und Buchsen(119920)
- Anschlussblöcke-DIN-Schiene, Kanal(9373)
- Anschlussblöcke-Kontakte(65)
- Anschlussblöcke-Barrier Blocks(47517)
- Anschlussblöcke-Adapter(1059)
- Solid State Lighting Verbinder-Kontakte(271)
- Festkörperbeleuchtungsstecker(1344)
- Buchsen für ICS, Transistoren-Adapter(275)
- Steckdosen für ICs, Transistoren(22148)
- Shunts, Jumper(907)
- Rechteckige Verbinder-Feder geladen(7721)
- Rechteckige Steckverbinder-Gehäuse(43023)
- Rechteckige Verbinder-Kopfzeilen, Spezial-PIN(6129)
- Rechteckige Anschlüsse - Header, Gefäße, weibliche Sockel(229601)
- Rechteckige Verbinder-Kopfzeilen, männliche Pins(543338)
- Rechteckige Anschlüsse - kostenloses Hängen, Panelhalterung(30142)
- Rechteckige Verbinder-Kontakte(10681)
- Rechteckige Anschlüsse - Board in, Direktdraht zum Board(2432)
- Rechteckige Verbinder-Adapter(475)
- Rechteckig - Brett zu Board -Steckern - Header, Behälter, weibliche Sockel(9)
- Rechteckig - Brett zu Board -Steckern - Header, männliche Stifte(2)
- Rechteckige Anschlüsse - Board -Abstandshalter, Stacker (Board zu Board)(238901)
- Rechteckige Anschlüsse - Arrays, Kantentyp, Mezzanin (Board zu Board)(37853)
- Stromanschluss-Eingänge, Steckdosen, Module(10310)
- Steckbare Steckverbinder(6049)
- Photovoltaik- (Solarpanel) Anschlüsse - Kontakte(77)
- Photovoltaik (Solarpanel) Anschlüsse(504)
- Modulare Steckverbinder-Verdrahtung Blöcke(99)
- Modulare Steckverbinder-Stecker(1674)
- Modulare Steckverbinder-Stecker Gehäuse(181)
- Modulare Steckverbinder-Buchsen mit magnetischen(10152)
- Modulare Steckverbinder-Buchsen(23416)
- Modulare Steckverbinder-Adapter(855)
- Memory Connectors-PC Cards-Adapter(21)
- Memory Connectors-PC Card Sockets(3299)
- Memory Connectors-Inline Modul Sockets(3390)
- LGH Steckverbinder(764)
- Keystone-Einsätze(2758)
- Keystone-Frontplatte, Frames(1926)
- Heavy Duty Steckverbinder-Einsätze, Module(4190)
- Schwerlastanschlüsse - Gehäuse, Kapuzen, Basen(17226)
- Heavy Duty Steckverbinder-Frames(523)
- Heavy Duty Steckverbinder-Kontakte(1832)
- Heavy Duty Steckverbinder-Baugruppen(671)
- LWL-Steckverbinder-Gehäuse(919)
- Glasfaser-Steckverbinder - Adapter(4455)
- LWL-Steckverbinder(3001)
- FFC, FPC (flache flexible) Steckverbinder - Gehäuse(652)
- FFC, FPC (flache flexible) Anschlüsse - Kontakte(202)
- FFC, FPC (flache flexible) Anschlüsse(18691)
- D-Sub, d-förmige Steckverbinder-Terminatoren(47)
- D-Sub, d-förmige Steckverbinder-Gehäuse(12238)
- D-Sub, d-förmige Steckverbinder-Kontakte(2714)
- D-Sub, D-förmige Steckverbinder-Rückenschalen, Kapuzen(5995)
- D-Sub, d-förmige Steckverbinder-Adapter(1304)
- D-Sub Steckverbinder(141346)
- D-förmige Steckverbinder-Centronics(8770)
- Kontakte, Frühling geladen und Druck(630)
- Kontakte-Multi Purpose(6196)
- Kontakte-"Leadframe"(122)
- Koaxial-Steckverbinder (RF)-Terminatoren(1231)
- Koaxial-Steckverbinder (RF)-Kontakte(480)
- Koaxial-Steckverbinder (RF)-Adapter(6386)
- Koaxialverbinder (RF)(25734)
- Rundsteckverbinder-Gehäuse(441226)
- Rundsteckverbinder-Kontakte(4737)
- Rundsteckverbinder-backschalen und Kabel-Klemmen(53692)
- Rundsteckverbinder-Adapter(8839)
- Rundanschlüsse(1196254)
- Card Edge Steckverbinder-Gehäuse(469)
- Karte Edge Verbinder-edgeboard Verbinder(672683)
- Card Edge Verbinder-Kontakte(325)
- Card Edge Verbinder-Adapter(73)
- Blade Type Power Steckverbinder-Gehäuse(837)
- Blade Type Power Connectors-Kontakte(393)
- Stromanbeter Blade Type(4163)
- Zwischen Serien-Adapter(649)
- Barrel-Stromanschluss(935)
- Barrel-Audio-Anschlüsse(2432)
- Barrel-Audio Adapter(92)
- Banana und Tip Steckverbinder-Buchsen, Stecker(1644)
- Banana and Tip Connectors-Binding Posts(239)
- Banana und Tip Steckverbinder-Adapter(75)
- Backplane Steckverbinder-spezialisiert(45586)
- Backplane Steckverbinder-Gehäuse(6863)
- Backplane Steckverbinder-Hard metrisch, Standard(6297)
- Backplane Steckverbinder-DIN 41612(9408)
- Backplane Steckverbinder-Kontakte(3583)
- Backplane Connectors-ARINC Einsätze(2357)
- Backplane Steckverbinder-ARINC(3789)
Relevanter Hersteller







-
Widerstände
-
Kondensatoren
Kondensatoren
- Aluminium-Elektrolytkondensatoren(16817)
- Trimmer, Variable Kondensatoren(3151)
- Dünne Folien-Kondensatoren(3473)
- Tantal-Kondensatoren(136103)
- Tantal-Polymer-Kondensatoren(9778)
- Silizium-Kondensatoren(320)
- Niob Oxide Kondensatoren(330)
- Mica und PTFE Kondensatoren(9101)
- Folien-Kondensatoren(150406)
- Elektrische Doppelschichtkondensatoren (EDLC), Superkondensatoren(2782)
- Keramische Kondensatoren(833829)
- Kondensatoren-Netzwerke, Arrays(2383)
- Aluminium-Elektrolytkondensatoren(125325)
- Aluminium-Polymer-Kondensatoren(7544)
Relevanter Hersteller






-
Transformatoren
Transformatoren
Relevanter Hersteller







-
Isolatoren
-
Kristalle, Oszillatoren, Resonatoren
Kristalle, Oszillatoren, Resonatoren
Relevanter Hersteller






-
Switches
Switches
- Verriegelungsschalter(2893)
- Emergency-Stop-Schalter (E-Stop)(1160)
- Kabelzugschalter(571)
- Toggle-Schalter(33608)
- Rändelrads Schalter(742)
- Schalter(14263)
- Snap-Aktion, Endschalter begrenzen(28077)
- Slide-Schalter(5166)
- Selector-Schalter(9720)
- Rotary Switches(13850)
- Rocker Schalter(53790)
- Drucktaste-Schalter-Hall-Effekt(127)
- Drucktaste Schalter(190826)
- Programmierbare Display-Switches(39)
- Navigations-Schalter, Joystick(1882)
- Magnetische, Reed-Schalter(1399)
- Keypad-Schalter(637)
- Keylock Schalter(3684)
- DIP Schalter(7747)
- Konfigurierbare Switch-Komponenten-Objektiv(1435)
- Konfigurierbare Schalter-Komponenten-Lichtquelle(1236)
- Konfigurierbare Switch-Komponenten-Contact Block(1401)
- Konfigurierbare Switch-Komponenten-Body(16077)
- Disconnect-Switch-Komponenten(2567)
Relevanter Hersteller






-
Relais
Relais
- Sicherheitsrelais(1310)
- Reedrelais(1735)
- Hochfrequenz (RF) -Relais(1190)
- Schütze (Festkörper)(686)
- Schütze (elektromechanisch)(11952)
- Kfz-Relais(1881)
- Solid State Relais(10652)
- Signal-Relais, bis zu 2 Ampere(9149)
- Relay-Sockets(2075)
- Power Relays, über 2 Ampere(31604)
- E / A-Relaismodule(712)
- I/o-Relay-Module-Input(2)
- I/o-Relay-Modul-Racks(247)
Relevanter Hersteller
















Sprache auswählen
Aktuelle Sprache
Deutsch
- English
- Deutsch
- Italia
- Français
- 日本語
- 한국의
- русский
- Svenska
- Nederland
- español
- Português
- polski
- Suomi
- Gaeilge
- Slovenská
- Slovenija
- Čeština
- Melayu
- Magyarország
- Hrvatska
- Dansk
- românesc
- Indonesia
- Ελλάδα
- Български език
- Afrikaans
- IsiXhosa
- isiZulu
- lietuvių
- Maori
- Kongeriket
- Монголулс
- O'zbek
- Tiếng Việt
- हिंदी
- اردو
- Kurdî
- Català
- Bosna
- Euskera
- العربية
- فارسی
- Corsa
- Chicheŵa
- עִבְרִית
- Latviešu
- Hausa
- Беларусь
- አማርኛ
- Republika e Shqipërisë
- Eesti Vabariik
- íslenska
- မြန်မာ
- Македонски
- Lëtzebuergesch
- საქართველო
- Cambodia
- Pilipino
- Azərbaycan
- ພາສາລາວ
- বাংলা ভাষার
- پښتو
- malaɡasʲ
- Кыргыз тили
- Ayiti
- Қазақша
- Samoa
- සිංහල
- ภาษาไทย
- Україна
- Kiswahili
- Cрпски
- Galego
- नेपाली
- Sesotho
- Тоҷикӣ
- Türk dili
- ગુજરાતી
- ಕನ್ನಡkannaḍa
- मराठी
Pull-up vs. Pulldown-Widerstände: Funktion, Auswahl und Anwendungen
Zeit: 2025/08/7
Durchsuchen: 4,472
In der digitalen Elektronik können undefinierte oder „schwimmende“ Eingangszustände ein fehlerhaftes Verhalten, Signalrauschen und unnötigen Stromverbrauch verursachen.Um dies zu lösen, können Sie sich auf Pull-up- und Pulldown-Widerstände verlassen, einfache, aber aktive Komponenten, die die Eingangspins standardmäßig für eine bekannte logische Ebene sicherstellen, wenn sie nicht aktiv angetrieben werden.In diesem Artikel wird untersucht, wie diese Widerstände funktionieren, wie die entsprechenden Werte und Best Practices für die Integration in Anwendungen wie Switches, Mikrocontroller und Kommunikationsprotokolle ausgewählt werden.
Katalog
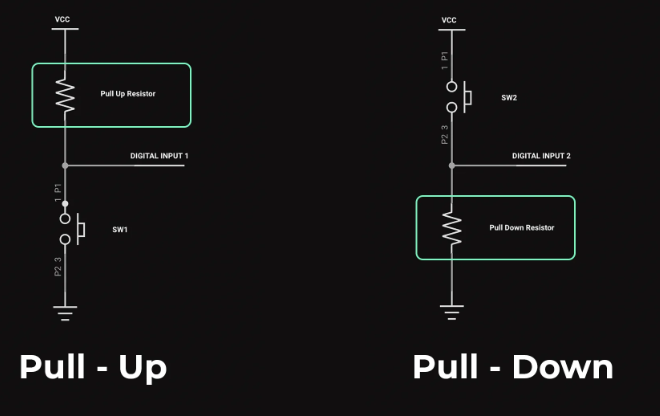
Abbildung 1. Pull-up- und Pulldown-Widerstände
Übersicht über Pull-up- und Pulldown-Widerstände
Pull-up- und Pulldown-Widerstände sind grundlegende passive Komponenten, die in digitalen Schaltungen verwendet werden, um sicherzustellen, dass die Eingangsnadeln auf einem bekannten Logikpegel festgelegt werden, wenn kein aktives Signal vorhanden ist.Ohne diese Widerstände können hohe Impedanzeingänge für Mikrocontroller, Logik-Gates und ICs „schweben“, elektrisches Rauschen aufnehmen und ein unregelmäßiges Verhalten, eine falsche Auslösung oder einen erhöhten Stromverbrauch verursachen.
• Pull-up-Widerstand: Verbunden Sie den Eingangsstift mit der positiven Spannungsversorgung (VCC) und setzen Sie die Standardlogik auf Hoch (z. B. 3,3 V oder 5 V).
• Pulldown-Widerstand: Verbindet den Eingangsstift mit Masse (GND) und zwingt den Standard-Logikpegel mit niedrig (0V).
Wie funktioniert Pull-up- und Pulldown-Widerstände?
Pull-up- und Pulldown-Widerstände werden normalerweise in Schaltungen verwendet, bei denen ein Eingangspin einen Standardzustand haben muss, aber auch auf externe Signale wie Schalter, Sensoren oder digitale Kommunikationslinien (wie I²C oder UART) reagieren muss.Ihre Funktion besteht darin, den Eingang sicher auf einen bekannten Spannungspegel mit hohem oder niedrigem Spannungsniveau zu verzerrt, wenn kein aktives Signal vorhanden ist.
Pull-up-Widerstandskonfiguration
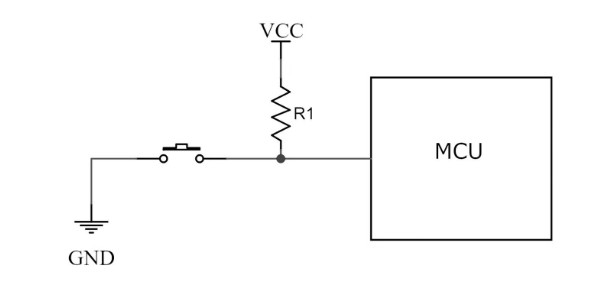
Abbildung 2. Konfiguration des Pull-up-Widerstands
In einer Pull-up-Konfiguration verbindet der Widerstand zwischen dem Eingangsstift und der positiven Spannungsschiene (VCC).Ein Schalter oder ein externes Gerät wird dann zwischen Eingang und Masse (GND) angeschlossen.
• Schalten Sie auf: Wenn der Schalter nicht gedrückt wird oder der externe Schaltkreis inaktiv ist, zieht der Pull-up-Widerstand den Eingangsstift vorsichtig nach VCC, was zu einem logischen hohen Zustand führt.
• Schalter geschlossen: Das Drücken des Schalters oder die Aktivierung des externen Signals verbindet den Eingang direkt mit dem Masse, überschreibt den Widerstand und das Fahren des Eingangs niedrig.
Diese Konfiguration ist in Tastenschaltungen üblich, wobei die Eingabe hoch bleiben sollte, es sei denn, eine Taste wird gedrückt, um sie zu erden.
Pulldown-Widerstandskonfiguration
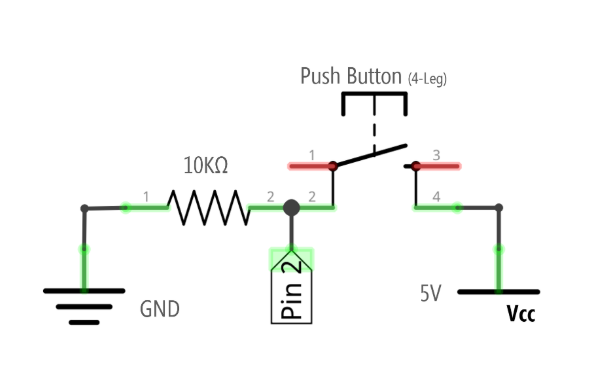
Abbildung 3.. Pulldown-Widerstandskonfiguration
Im Gegensatz dazu verbindet ein Pulldown-Widerstand den Eingangsstift mit dem Masse.Der Schalter oder das externe Gerät wird dann zwischen Eingang und VCC platziert.
• Schalten Sie auf: Ohne Signal aus dem Schalter hält der Pulldown-Widerstand den Eingang im Bodenpotential, was zu einer Logik niedrig ist.
• Schalter geschlossen: Durch Aktivieren des Schalters wird der Eingang an VCC verbunden, den Widerstand überschreibt und den Eingang hoch überschreitet.
Dieses Setup ist in Schaltungen nützlich, bei denen eine Eingabe standardmäßig niedrig ist, es sei denn, eine externe Quelle fährt sie explizit hoch.
Pull-up vs. Pulldown-Widerstände Unterschiede
|
Besonderheit |
Pull-up-Widerstand |
Pulldown-Widerstand |
|
Verbunden mit |
Positive Versorgungsspannung (VCC) |
Boden (GND) |
|
Standard -Logikebene |
Logisch hoch (z. B. 3,3 V oder 5 V) |
Logik niedrig (0V) |
|
Häufige Anwendungsfälle |
I²C-Kommunikationsleitungen, offenes Drain
Ausgänge und GPIOs benötigen einen hohen Leerlaufzustand |
GPIO -Eingänge, die einen niedrigen Leerlaufzustand benötigen,
Spezifische Logiksteuerungsszenarien |
|
Schalten Sie den offenen Zustand |
Eingabe liest hoch |
Eingabe liest niedrig |
|
Schalter geschlossener Zustand |
Eingabe wird auf niedrig gezogen (über
Boden) |
Die Eingabe wird auf hoch gezogen (über VCC) |
Auswahl des richtigen Widerstandswertes
Im Digital Circuit Design muss der Widerstand stark genug sein, um die Linie in einem bekannten Zustand zu halten, aber nicht so stark, dass er beabsichtigte Signalüberschreibungen blockiert.Der gewählte Wert wirkt sich auf drei kritische Leistungsbereiche aus:
• Stromverbrauch
• Signalgeschwindigkeit
• Geräuschimmunität
Widerstandswert Kompromisse
Ein hoher Widerstand (10 kΩ - 100k Ω) wird vorgezogen, um die Stromauszeichnung zu reduzieren.Diese Werte sind ideal für batteriebetriebene oder eingebettete Systeme mit geringer Leistung.Sie erzielen gut in Signalen mit niedrigen Geschwindigkeiten, bei denen das Timing nicht kritisch ist und Übergänge selten.Der Nachteil ist jedoch, dass eine schwache Zugstärke die Rauschanfälligkeit erhöht, was dazu führen kann, dass Signallinien in lauten Umgebungen schweben oder sich unregelmäßig verhalten.
Niedriger Widerstand (1 kΩ-5 kΩ) bietet schnellere Signalübergänge, was es für Hochgeschwindigkeitsdigitalkreise geeignet ist.Es verbessert auch die Rauschimmunität, indem es eine stärkere Zugstärke bietet und die Signalintegrität verbessert.Der Kompromiss ist ein höherer Stromverbrauch, insbesondere wenn die Linie in den entgegengesetzten logischen Zustand gezogen wird.Dies könnte ein Problem bei energieempfindlichen Entwürfen sein.
Empfohlene Widerstandsbereiche (basierend auf der Logikfamilie)
|
Systemtyp |
Typischer Zugwiderstandsbereich |
|
5V TTL Logic |
1kΩ - 5kΩ |
|
3,3 V CMOS -Logik |
10kΩ - 50 kΩ |
|
Linien mit offenem Drain (z. B. I²C) |
2,2 kΩ - 10 kΩ (abhängig von
Busgeschwindigkeit und Kapazität) |
Berechnung von Pull-up- und Pulldown-Widerstandswerten
Um den Widerstandswert zu berechnen, verwenden Sie die Grundformel aus dem Ohmschen Gesetz:
Wo:
• R = Widerstand (in Ohm, ω)
• V = Versorgungsspannung (typischerweise 3,3 V oder 5 V in digitalen Schaltungen)
• i = gewünschter Strom durch den Widerstand (in Ampere, a)
Dieser Strom wird normalerweise ausgewählt, basierend darauf, wie viel "Zugstärke" erforderlich ist, um ein definiertes Logikniveau aufrechtzuerhalten, ohne übermäßige Leistung zu erzeugen.
Beispielberechnung
• Ziel: Wählen Sie einen Pull-up-Widerstand für einen digitalen 5-V-Eingang aus und ermöglichen ungefähr 0,5 mA Strom.
In diesem Fall zieht ein 10 kΩ -Widerstand die Leitung bis zu 5 V mit einem Strom von 0,5 mA, wenn der Eingang im Leerlauf ist.Dieser Wert liefert eine gute Balance zwischen geringer Leistung und angemessener Geräuschimmunität.
Anwendungen von Pull-up- und Pulldown-Widerstand
GPIO-Eingänge (allgemeine Einsatz-/Ausgabe)
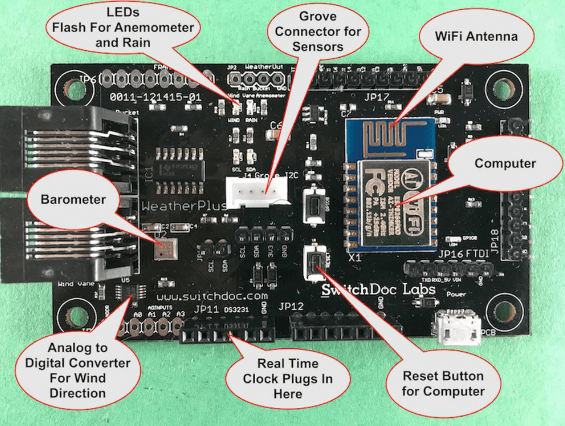
Abbildung 4. GPIO-Eingänge (allgemeine Einsatz- und Ausgangsausgabe)
Bei der Konfiguration von Mikrocontroller -Stiften als Eingänge ist es wichtig, dass sie nicht schweben, wenn keine Signalquelle angeschlossen ist.Pull-up- oder Pulldown-Widerstände sorgen für ein Standard-Logikniveau, wodurch unvorhersehbares Verhalten oder Schwankungen mit Stromabfällen vermieden werden.Viele Mikrocontroller bieten interne Klimmzüge an, aber externe Widerstände werden häufig zur zusätzlichen Steuerung verwendet oder wenn interne Optionen nicht verfügbar sind.
Debouncing wechseln
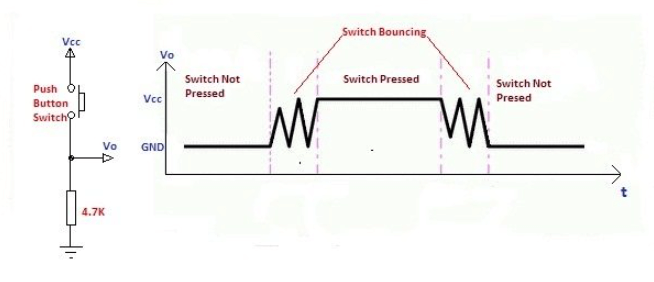
Abbildung 5. Debouncing Switch
Mechanische Schalter springen auf natürliche Weise beim Drücken oder freigegebenen Absprung, was zu mehreren schnellen Übergängen zwischen hoher und niedrig ist.Ein Pull-up- oder Pull-Down-Widerstand in Kombination mit Software- oder Hardware-Entfernungstechniken hilft dabei, das Eingangssignal zu stabilisieren und sicherzustellen, dass der Mikrocontroller nur einen einzigen sauberen Übergang pro Presse registriert.
I²C-Kommunikation (Interintegrierte Schaltung)
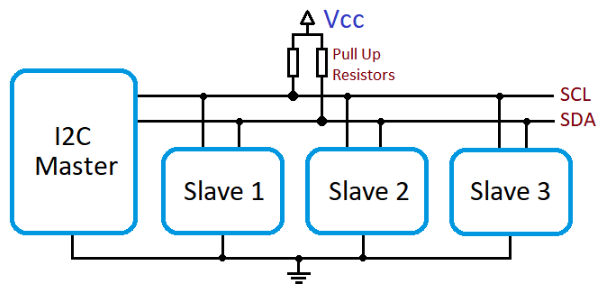
Abbildung 6. I²C-Kommunikation (Interintegrierte Schaltung)
In I²C-Protokollen verwenden sowohl die SCL- als auch die SDA-Linien (Daten) (DATA) Open-Drain- oder Open-Collector-Konfigurationen.Dies bedeutet, dass Geräte die Linie nur niedrig ziehen können und sich auf externe Klimmzüge verlassen müssen, um die Linie hoch zu bringen, wenn kein Gerät sie aktiv fährt.Ohne Pull-up-Widerstände kann die I²C-Kommunikation nicht korrekt funktionieren, da die Linien undefiniert oder niedrig bleiben würden.
Open-Drain- oder Open-Collector-Ausgänge
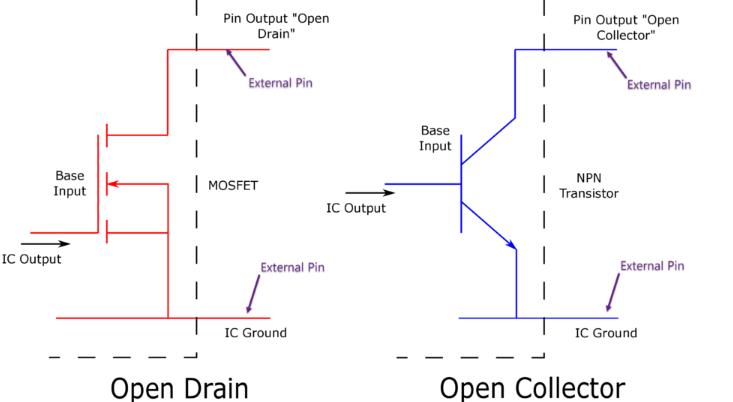
Abbildung 7. Open-Drain- oder Open-Sammlerausgänge
Einige digitale Ausgänge wie die von Transistoren, Sensoren oder Logik-ICs sind so ausgelegt, dass sie nur den Strom versenken (die Linie niedrig ziehen) und benötigen einen Pull-up-Widerstand, um bei inaktivem Inaktiven ein hohes Niveau festzulegen.Diese sind in Bussystemen, Interrupt-Linien und kabelgebundenen und logischen Konfigurationen üblich.
Linien zurücksetzen und unterbrechen
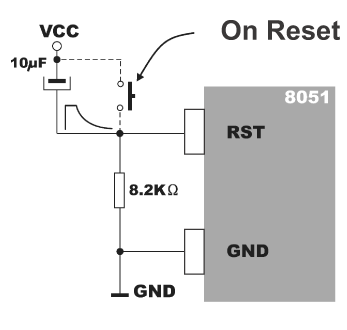
Abbildung 8. Linien zurücksetzen und unterbrechen
In vielen mikrocontroller-basierten Systemen verwenden Zurücksetzen von Stiften oder externen Interrupt-Linien Pull-up-Widerstände, um einen Standard-Hochzustand aufrechtzuerhalten.Wenn diese Leitungen durch eine Taste oder einen externen Schaltkreis niedrig gezogen werden, lösen diese Leitungen ein System zurück oder unterbrechen Sie das Ereignis.Ohne den Widerstand kann der Eingang schweben, was falsche Auslöser oder Systeminstabilität verursacht.
Vor- und Nachteile
Vorteile
• Stellen Sie stabile Logikniveaus sicher: Diese Widerstände verhindern schwimmende Eingänge, indem ein Stift in einem bekannten Spannungsniveau (hoch oder niedrig) gehalten wird, wenn kein aktives Signal angewendet wird.Dies beseitigt unregelmäßige oder undefinierte digitale Zustände.
• Kostengünstig und einfach zu implementieren: Pull -Widerstände sind grundlegende passive Komponenten, die normalerweise nur wenige Cent kosten.Ihre einfache Implementierung macht sie zu einer idealen Wahl für die Stabilisierung der Schaltung in professionellen Designs.
• Oft eingebaut auf Mikrocontroller-Stiften: Viele moderne Mikrocontroller (z. B. Arduino, STM32, ESP32 und AVR-Chips) bieten konfigurierbare interne Pull-up- oder Pulldown-Widerstände, was das Schaltungsdesign durch Reduzierung der Notwendigkeit externer Komponenten vereinfacht.
• Nützlich für Protokolle wie I²C und SPI: Kommunikationsstandards mit offenem Drain beruhen auf Pull-up-Widerständen für den ordnungsgemäßen Betrieb, sodass sie in Kommunikationsaufbauten mit mehreren Geräten erforderlich sind.
Nachteile
• Zeichnen Sie statischen Strom, wenn Sie überschrieben werden: Wenn der Eingang aktiv zum Zugwiderstand entgegengesetzt ist (z. B. Tief gegen einen Klimmzug), fließt eine kleine Menge statischer Strom durch den Widerstand.Dies trägt zum Stromverlust bei, insbesondere bei Geräten mit geringer Leistung oder batteriebetriebener Batterie.
• Kann das Signalübergang verlangsamen, wenn der Widerstand zu hoch ist: Hochwiderstandswerte begrenzen den Strom zur Aufladung oder Entladung einer Streukapazität auf der Linie.Dies kann zu langsameren Anstiegs- oder Sturzzeiten führen, was die Leistung von Hochgeschwindigkeitssignalen oder zeitlichempfindlichen Anwendungen beeinflusst.
• Unsachgemäße Werte können Rauschempfindlichkeit verursachen: Wenn der Widerstandswert zu hoch ist, kann der Eingang anfällig für elektromagnetische Interferenzen (EMI) oder Umgebungsgeräusche werden, was zu falschen logischen Übergängen und einem instabilen Verhalten führt.
Abschluss
Pull-up- und Pulldown-Widerstände sind möglicherweise klein, aber ihre Rolle bei der digitalen Schaltungsstabilität ist signifikant.Von der Verhinderung schwimmender Eingaben bis hin zur Ermöglichung zuverlässiger Kommunikationsprotokolle bieten sie eine einfache, aber leistungsstarke Lösung für die Aufrechterhaltung vorhersehbarer Logikzustände.Durch das Verständnis ihrer Konfigurationen, die Auswahl geeigneter Werte und die Anwendung von Best Practices können Sie die Geräuschimmunität verbessern, den Stromverbrauch verringern und die Gesamtkreisverkehrszuverlässigkeit verbessern.
Häufig gestellte Fragen [FAQ]
1. Kann ich sowohl Pull-up- als auch Pulldown-Widerstände auf demselben Eingangsstift verwenden?
Nein, die Verwendung von beiden auf demselben Pin erzeugt einen Spannungsteiler, der zu einem undefinierten Logikniveau führt.Verwenden Sie je nach gewünschtem Standardzustand immer entweder einen Pull-up- oder Pulldown-Widerstand.
2. Was passiert, wenn ich keinen Pull-up- oder Pulldown-Widerstand verwende?
Ohne einen Pull -Widerstand kann der Eingangsstift schweben, Rauschen aufnehmen und ein zufälliges oder unberechenbares Verhalten in digitalen Systemen verursachen, insbesondere in Mikrocontrollern oder Logikstoren.
3. Benötige ich externe Pull-up-Widerstände, wenn mein Mikrocontroller interne hat?
Nicht immer.Interne Klimmzüge können für allgemeine Anwendungen ausreichen, aber externe Widerstände bieten mehr Kontrolle über Widerstandswerte und sind für rauschempfindliche oder zeitlich kritische Schaltungen besser.
4. Wie wirken sich Pull-up-Widerstände aus, die Dunkelschaltungen für Switches haben?
Pull-up-Widerstände helfen, den Eingang hoch zu halten, wenn ein Schalter geöffnet ist.In Kombination mit Downounce Logic (Hardware oder Software) gewährleisten sie saubere Signalübergänge ohne falsche Auslösen durch mechanisches Sprung.
5. Können Pull-up- oder Pulldown-Widerstände mit analogen Eingängen verwendet werden?
Im Allgemeinen, nein, weil Ziehenwiderstände den Stift zu einem digitalen Hoch oder niedrigen Tiefpunkt zwingen.Verwenden Sie für analoge Eingänge einen Spannungssteiler oder eine Pufferschaltung, um stattdessen eine stabile, messbare Spannung bereitzustellen.
Verwandter Artikel
-
![Leichtsensor verstehen: Typen, Spezifikationen, Verwendungen und zukünftige Trends]() Jul 29 2025Leichtsensor verstehen: Typen, Spezifikationen, Verwendungen und zukünftige Trends
Jul 29 2025Leichtsensor verstehen: Typen, Spezifikationen, Verwendungen und zukünftige TrendsLichtsensoren sind grundlegende Komponenten in der modernen Elektronik, mit denen Geräte mit Präzision und Intelligenz wahrnehmen und auf sich ände... -
![Die vollständige Anleitung zur Wärmepaste für elektronische Komponenten]() Jun 25 2024Die vollständige Anleitung zur Wärmepaste für elektronische Komponenten
Jun 25 2024Die vollständige Anleitung zur Wärmepaste für elektronische KomponentenThermische Paste spielt eine Schlüsselrolle bei der Aufrechterhaltung der Effizienz und Langlebigkeit von Wärmegenerierungskomponenten wie CPUs und ...


Verwandte -Produkte

CL31B102KJHNNNE
CAP CER 1000PF 2KV X7R 1206

EVK105CH1R8BW-F
CAP CER 1.8PF 16V C0H 0402

1206GA121JAT2A
CAP CER 120PF 2KV NP0 1206

TAJD336K020HNJ
CAP TANT 33UF 10% 20V 2917

US1JDFQ-13
DIODE GEN PURP 600V 1A DFLAT

XCR3512XL-7PQ208C
IC CPLD 512MC 7NS 208QFP

74AC245MTC
IC TXRX NON-INVERT 6V 20TSSOP

S29GL128P11FFIV1
SPANSIO BGA

SN105239A
SN105239A TI

AD7545JP
IC DAC 12BIT W/BUFF MULT 20-PLCC

AIT8427D
AIT BGA

T491B475M025AT2478
CAP TANT 4.7UF 20% 25V 1411