Alle Kategorien
-
Integrierte schaltkreise (ICS)
Integrierte schaltkreise (ICS)
- Schnittstelle - Sensor, kapazitive Berührung(642)
- Spezialisierte ICS(12302)
- PMIC-Spannungsregler-besonderer Zweck(5644)
- PMIC-Spannungsregler-lineare Regler(793)
- PMIC-Spannungsregler-linear + Switching(1829)
- PMIC-Spannungsregler-linear(70981)
- PMIC-Spannungsregler-DC DC Switching Regulators(39569)
- PMIC-Regler-DC-DC-Switching-Controller(13507)
- PMIC-Spannungs-Referenz(9453)
- PMIC-v/f und f/v-Wandler(145)
- PMIC-Thermal Management(592)
- PMIC-Supervisor(47946)
- PMIC-RMS bis DC-Wandler(170)
- PMIC-Netzteil-Controller, Monitore(2104)
- PMIC-Power over Ethernet (PoE) Controller(1008)
- PMIC-Power Management-spezialisierte(7722)
- PMIC-Netzschalter, Treiber laden(7706)
- PMIC-PFC (Power Factor Correction)(1222)
- PMIC oder Steuerungen, ideale Dioden(705)
- PMIC-Motor-Treiber, Regler(4712)
- PMIC-Beleuchtung, Ballast-Regler(560)
- PMIC-LED-Treiber(7282)
- PMIC-Laser-Treiber(573)
- PMIC-Hot-Swap-Controller(2816)
- PMIC-Gate-Treiber(7083)
- PMIC-voll, Half-Bridge-Treiber(1342)
- PMIC-Energy Messung(654)
- PMIC-Display-Treiber(1435)
- PMIC-derzeitige Regulierung/Management(1481)
- PMIC-Batterie-Management(5553)
- PMIC-Ladegeräte(3831)
- PMIC-AC DC Konverter, Offline Schalter(4905)
- Memory-Controller(358)
- Memory-Konfigurations-Proms für FPGAs(639)
- Speicher-Akkus(13)
- Erinnerung(65694)
- Logic-universelle Bus-Funktionen(706)
- Logic-Übersetzer, Level-Shifter(2854)
- Logik-Specialty Logic(1870)
- Logik-Signal-Schalter, Multiplexer, Decoder(9420)
- Logic-Shift-Register(2665)
- Logic-Parity Generatoren und Checkers(335)
- Logic-multivibratoren(831)
- Logik-Latches(3658)
- Logik - Tore und Wechselrichter - Multifunktion, konfigurierbar(1687)
- Logik-Tore und Wechselrichter(16453)
- Logic-Flip Flops(7780)
- Logik-FIFOs Speicher(4240)
- Logik-Zähler, Trennlinien(3456)
- Logik-Vergleichsoperator(592)
- Logik-Puffer, Treiber, Receiver, Transceiver(17835)
- Linear-Video-Verarbeitung(2909)
- Linear-Vergleichsoperator(5084)
- Linear-analoge Multiplikatoren, Trennwände(263)
- Linear-Verstärker-Video Amps und Module(1905)
- Linear-Verstärker-Spezial-Zweck(1856)
- Linear - Verstärker - Instrumentierung, OP -Verstärker, Pufferverstärker(34236)
- Linear-Verstärker-Audio(4567)
- Interface-Voice Record und Playback(556)
- Schnittstelle - UARTs (Universal Asynchronous Receivers -Sender)(1237)
- Schnittstelle-Telecom(4467)
- Interface-spezialisierte(4833)
- Interface-Signal Terminatoren(333)
- Interface-Signal-Puffer, Repeater, Splitter(1449)
- Interface-Serializer, Deserializer(1480)
- Schnittstellen-Sensor und Detektor-Interfaces(1524)
- Interface-Module(169)
- Interface-Modems-ICS und Module(407)
- Interface-e/a-Expander(1136)
- Interface-Filter-aktiv(1226)
- Interface-Encoder, Decoder, Konverter(714)
- Interface-Treiber, Receiver, Transceiver(20755)
- Interface-Direct Digital Synthesis (DDS)(117)
- Interface-Controller(3628)
- Interface-Codecs(1676)
- Schnittstelle - Analoge Switches, Multiplexer, Demultiplexer(12567)
- Schnittstelle-analoge Schalter-spezieller Zweck(2533)
- Embedded-System on Chip (SoC)(4496)
- Embedded-PLDs (programmierbare Logik-Vorrichtung)(971)
- Embedded-Mikroprozessoren(10083)
- Embedded-Mikrocontroller-anwendungsspezifische(2275)
- Embedded-Mikrocontroller(99285)
- Eingebettet - Mikrocontroller, Mikroprozessor, FPGA -Module(1527)
- Eingebettet - FPGAs (Feldprogrammiergate -Array) mit Mikrocontrollern(81)
- Embedded-FPGAs (Field Programmable Gate Array)(27747)
- Embedded-DSP (Digital Signal Processors)(4081)
- Eingebettet - CPLDs (komplexe programmierbare Logikgeräte)(5187)
- Datenerfassung-Touch Screen Controller(1210)
- Datenerfassung-Digital to Analog Converter (DAC)(14419)
- Datenerfassung-digitale Potentiometer(6250)
- Datenerfassung-analog zu Digital Converters (ADC)(17776)
- Datenerfassung-analoges Frontend (AFE)(787)
- Datenerfassung-MDE/DACs-spezieller Zweck(3043)
- Clock/Timing-Uhren in Echtzeit(2446)
- Uhr/Timing - programmierbare Timer und Oszillatoren(23469)
- Clock/Timing-IC-Akkus(4)
- Takt/Timing-Delay Lines(1049)
- Uhr/Timing - Uhrengeneratoren, PLLS, Frequenzsynthesizer(32775)
- Clock/Timing-Clock Puffer, Treiber(4568)
- Clock/Timing-anwendungsspezifische(8652)
- Audio Spezial-Zweck(1564)
Relevanter Hersteller







-
Diskrete Halbleiter-Produkte
Diskrete Halbleiter-Produkte
- Aktuelle Regulierung - Dioden, Transistoren(1090)
- Transistoren-besonderer Zweck(226)
- Transistoren-programmierbare Unijunction(48)
- Transistoren-jfets(1558)
- Transistoren-IGBTs-Einzel(4799)
- Transistoren-IGBTs-Module(63420)
- Transistoren-IGBTs-Arrays(26)
- Transistoren-FETs, MOSFETs-Einzel(48330)
- Transistoren-FETs, MOSFETs-RF(4903)
- Transistoren-FETs, MOSFETs-Arrays(6641)
- Transistoren-Bipolar (BJT)-einzeln, Pre-biased(4539)
- Transistoren-Bipolar (BJT)-Einzel(25800)
- Transistoren-Bipolar (BJT)-RF(2087)
- Transistoren-bipolare (BJT)-Arrays, Pre-biased(2115)
- Transistoren-bipolare (BJT)-Arrays(2310)
- Thyristor-triacs(4044)
- Thyristoren-SCRs-Module(3967)
- Thyristoren-SCRs(5436)
- Thyristoren-diacs, sidacs(319)
- Power Driver Module(1627)
- Dioden-zenerdioden-Einzel(87483)
- Dioden-zenerdioden-Arrays(2619)
- Dioden - variable Kapazität (Varik, Varaktoren)(1200)
- Dioden-RF(2753)
- Dioden-Gleichrichter-Einzel(67528)
- Dioden-Gleichrichter-Arrays(20581)
- Dioden-Brücke-Gleichrichter(11700)
Relevanter Hersteller




-
RF/if und RFID
RF/if und RFID
- SIM -Karten für Abonnenten -Identifikationsmodul (SIM)(77)
- RF -Zirkulatoren und Isolatoren(1742)
- RFID, RF-Zugang, Monitoring-ICS(1550)
- RFID Transponder, Tags(747)
- RFID Lesegeräte(464)
- RFID -Bewertungs- und Entwicklungskits, Boards(30)
- RFID Antennen(329)
- RFI und EMI - Abschirm- und Absorbungsmaterialien(6444)
- HF und EMI-Kontakte, Fingerstock und Dichtungen(7497)
- RF Transmitter(668)
- RF Transceiver Module(6900)
- RF-Transceiver ICS(4169)
- HF-Schalter(9276)
- RF Shields(16401)
- HF-Receiver(1998)
- HF -Empfänger, Sender und Transceiver -Einheiten(2763)
- RF Power Divider/Splitter(1223)
- RF Power Controller ICs(86)
- HF-Modulatoren(710)
- HF-Mixer(2800)
- RF misc ICS und Module(3276)
- HF-Front-End (LNA + PA)(419)
- RF -Bewertungs- und Entwicklungskits, Boards(747)
- HF-gerichtete Kupplung(2718)
- RF Diplexer(1464)
- RF-Detektoren(412)
- RF-Demodulatoren(249)
- HF-Antennen(12319)
- HF-Verstärker(19651)
- Balun(1496)
- Dämpfungsglieder(4852)
Relevanter Hersteller







-
Optoelektronik
Optoelektronik
- Optomechanisch(480)
- Leuchten(125)
- Laserdioden, Lasermodule - Laserlieferung, Laserfasern(345)
- Hene Lasersysteme(31)
- Hene Laserköpfe(27)
- Hintergrundbeleuchtung anzeigen(93)
- Xenon-Beleuchtung(387)
- Touchscreen-Overlays(453)
- Panel Indicators, Pilot Lights(75729)
- Optik-Remote-Phosphor-Lichtquelle(269)
- Optik-Reflektoren(665)
- Optik-leichte Rohre(5384)
- Optik-Objektive(4951)
- LEDs-Spacer, Unentschieden(2718)
- LEDs-Lamp-Ersetzungen(29718)
- LEDs - Leiterplattenindikatoren, Arrays, Lichtstäbe, Balkendiagramme(9083)
- LED-thermische Produkte(667)
- LED-Beleuchtung(64)
- LED-Beleuchtung-weiß(37580)
- LED-Beleuchtung-Farbe(4728)
- LED-Beleuchtung-Maiskolben, Motoren, Module(28735)
- LED-Anzeige-diskret(27601)
- Laserdioden, Module(1553)
- Lampen-Glühlampen, Neons(311004)
- Lampen-Kälte-Fluoreszenz (KKL) & UV(164)
- Wechselrichter(7728)
- Infrarot, UV, sichtbare Strahler(3871)
- Fiber Optics-Transmitter-Antrieb integriert(4085)
- Fiber Optics-Transmitter-diskrete(350)
- Fiber Optics-Transceiver Module(18758)
- Fiberoptik-Switches, Multiplexer, Demultiplexer(1387)
- Fiberoptik-Receiver(695)
- Fiberoptik-Dämpfung(654)
- Elektrolumineszenz(102)
- Display, Monitor-Interface Controller(98)
- Display-Module-Vakuum-Leuchtstofflampen (VFD)(249)
- Module anzeigen-LED Dot Matrix und Cluster(865)
- Display-Module-LED-Zeichen und numerische(5421)
- Display-Module-LCD, OLED, Graphic(4654)
- Display-Module-LCD, OLED-Zeichen und numerische(2202)
- Display-Blenden, Objektive(88)
- Adresse, Spezialität(458)
Relevanter Hersteller







-
Sensoren, Wandler
Sensoren, Wandler
- Ultraschallempfänger, Sender - Industrial(115)
- Temperatursensoren - Thermostate - Mechanisch - Industrielles(3103)
- Temperatursensoren - Analog und digitaler Ausgang - Industrial(209)
- Näherungssensoren - Industrial(13611)
- Drucksensoren, Wandler - Industrie(26503)
- Optische Sensoren - Photonik - Zähler, Detektoren, SPCM (Einzelphotonzählmodul)(751)
- Optische Sensoren - Kameramodule(875)
- Magnetsensoren - Position, Nähe, Geschwindigkeit (Module) - Industrie(554)
- Kraftsensoren - Industrial(346)
- Flusssensoren - Industrielles(151)
- Float, Level Sensoren - Industrial(310)
- Encoder - Industrial(4980)
- Farbsensoren - Industrial(50)
- Berührungssensoren(100)
- Ultraschall-Receiver, Transmitter(2421)
- Temperatursensoren-Thermostat-Solid State(1096)
- Temperatursensoren-Thermostate-mechanisch(3397)
- Temperatursensoren - Thermoelemente, Temperatursonden(1921)
- Temperatursensoren - RTD (Widerstandstemperaturdetektor)(1525)
- Temperatursensoren-PTC-Thermistoren(2273)
- Temperatursensoren-ntc-thermistoren(13259)
- Temperatursensoren-Analog und Digital Output(3928)
- DMS(1399)
- Spezialisierte Sensoren(1861)
- Solarzellen(503)
- Schock-Sensoren(84)
- Sensor-Interface-Junction-Blöcke(2519)
- Sensor-Kabel-Baugruppen(22011)
- Proximity/Belegung Sensoren-fertige Einheiten(725)
- Näherungsschalter(2860)
- Drucksensoren, Wandler(11317)
- Positionssensoren - Winkel, lineare Positionsmessung(6022)
- Optische Sensoren-reflektierende-Logik-Ausgang(194)
- Optische Sensoren - reflektierend - analoge Ausgang(432)
- Optische Sensoren-Phototransistoren(1027)
- Optische Sensoren - Photointerrupter - Schlitztyp - Transistorausgang(1427)
- Optische Sensoren - Photointerrupter - Schlitztyp - Logikausgabe(1215)
- Optische Sensoren-Lichtschranke, Industrial(16763)
- Optische Sensoren-Photodioden(1543)
- Optische Sensoren-Foto-Detektoren-Remote Receiver(2605)
- Optische Sensoren-Foto-Detektoren-Logik-Ausgang(146)
- Optische Sensoren-Foto-Detektoren-CDs-Zellen(74)
- Optische Sensoren-Distanz-Messung(377)
- Optische Sensoren-Ambient Light, IR, UV Sensoren(1305)
- Multifunktions(558)
- Motion Sensors-Vibration(337)
- Motion Sensors-Tilt Schalter(67)
- Bewegungsmelder-optisch(719)
- Motion Sensors-Neigungssensoren(175)
- Motion Sensors-Imus (Trägheit-Maßeinheiten)(416)
- Motion Sensors-Kreisel(214)
- Motion Sensors-Beschleunigungsmesser(1911)
- Magnete-Sensor abgestimmt(119)
- Magnete-Multi Purpose(1965)
- Magnetische Sensoren-Schalter (Solid State)(3700)
- Magnetsensoren - Position, Nähe, Geschwindigkeit (Module)(5199)
- Magnetische Sensoren-linear, Kompass (ICS)(1247)
- Magnetsensoren - Kompass, Magnetfeld (Module)(35)
- LVDT -Wandler (linearer variabler Differentialtransformator)(204)
- IrDA Transceiver-Module(196)
- Bildsensor, Kamera(2235)
- Feuchtigkeit-Sensoren(1425)
- Gas-Sensoren(1217)
- Force Sensoren(188)
- Durchfluss-Sensoren(550)
- Float, Level Sensoren(1343)
- Encoder(6357)
- Staub-Sensoren(43)
- Aktuelle Wandler(3455)
- Color Sensoren(85)
- Verstärker(1905)
Relevanter Hersteller







-
Anschlüsse, Verbindungen
Anschlüsse, Verbindungen
- USB, DVI, HDMI -Stecker(446)
- Festkörperbeleuchtungsstecker(555)
- Steckdosen für ICs, Transistoren(953)
- Steckbare Steckverbinder(1221)
- Photovoltaik (Solarpanel) Anschlüsse(136)
- Glasfaseranschlüsse(370)
- FFC, FPC (flache flexible) Anschlüsse(761)
- D-Sub, D-förmige Stecker(2887)
- Koaxialverbinder (RF)(2389)
- Rundanschlüsse(14162)
- Stromanbeter Blade Type(273)
- Stecker und Behälter(2597)
- USB, DVI, HDMI Stecker-Adapter(572)
- USB, DVI, HDMI -Stecker(4298)
- Klemmen-Wire to Board Steckverbinder(217)
- Klemmen-Draht-Steckverbinder(4322)
- Klemmen-Draht-Pin Stecker(328)
- Terminals-Revolver Steckverbinder(1273)
- Terminals-spezialisierte Steckverbinder(2042)
- Klemmen-Spaten Verbinder(3902)
- Klemmen-Löten/Stecker(345)
- Klemmen-Verschraubungen(745)
- Klemmen-Ring Steckverbinder(12596)
- Klemmen-rechteckige Steckverbinder(4747)
- Terminals - Schnellverbindungen, schnelle Trennungsanschlüsse(8514)
- Klemmen-PC PIN, Single Post Connectors(3776)
- Klemmen-PC-Pin-Buchsen, Sockel-Steckverbinder(5883)
- Klemmen-magnetische Draht-Steckverbinder(1653)
- Klemmen-Messer Steckverbinder(112)
- Klemmen-Gehäuse, Stiefel(2850)
- Klemmen-Folie Steckverbinder(108)
- Klemmen-Barrel, Bullet-Steckverbinder(1107)
- Klemmen-Adapter(137)
- Terminal-Streifen und Revolver-Boards(1159)
- Terminal Junction Systeme(2533)
- Anschlussblöcke-Draht an Bord(43615)
- Terminal Blocks-spezialisierte(3722)
- Terminal Blocks-Power Distribution(847)
- Anschlussblöcke-Panel Mount(1359)
- Terminal Blocks-Interface Module(1819)
- Anschlussblöcke-Kopfzeilen, Stecker und Buchsen(119920)
- Anschlussblöcke-DIN-Schiene, Kanal(9373)
- Anschlussblöcke-Kontakte(65)
- Anschlussblöcke-Barrier Blocks(47517)
- Anschlussblöcke-Adapter(1059)
- Solid State Lighting Verbinder-Kontakte(271)
- Festkörperbeleuchtungsstecker(1344)
- Buchsen für ICS, Transistoren-Adapter(275)
- Steckdosen für ICs, Transistoren(22148)
- Shunts, Jumper(907)
- Rechteckige Verbinder-Feder geladen(7721)
- Rechteckige Steckverbinder-Gehäuse(43023)
- Rechteckige Verbinder-Kopfzeilen, Spezial-PIN(6129)
- Rechteckige Anschlüsse - Header, Gefäße, weibliche Sockel(229601)
- Rechteckige Verbinder-Kopfzeilen, männliche Pins(543338)
- Rechteckige Anschlüsse - kostenloses Hängen, Panelhalterung(30142)
- Rechteckige Verbinder-Kontakte(10681)
- Rechteckige Anschlüsse - Board in, Direktdraht zum Board(2432)
- Rechteckige Verbinder-Adapter(475)
- Rechteckig - Brett zu Board -Steckern - Header, Behälter, weibliche Sockel(9)
- Rechteckig - Brett zu Board -Steckern - Header, männliche Stifte(2)
- Rechteckige Anschlüsse - Board -Abstandshalter, Stacker (Board zu Board)(238901)
- Rechteckige Anschlüsse - Arrays, Kantentyp, Mezzanin (Board zu Board)(37853)
- Stromanschluss-Eingänge, Steckdosen, Module(10310)
- Steckbare Steckverbinder(6049)
- Photovoltaik- (Solarpanel) Anschlüsse - Kontakte(77)
- Photovoltaik (Solarpanel) Anschlüsse(504)
- Modulare Steckverbinder-Verdrahtung Blöcke(99)
- Modulare Steckverbinder-Stecker(1674)
- Modulare Steckverbinder-Stecker Gehäuse(181)
- Modulare Steckverbinder-Buchsen mit magnetischen(10152)
- Modulare Steckverbinder-Buchsen(23416)
- Modulare Steckverbinder-Adapter(855)
- Memory Connectors-PC Cards-Adapter(21)
- Memory Connectors-PC Card Sockets(3299)
- Memory Connectors-Inline Modul Sockets(3390)
- LGH Steckverbinder(764)
- Keystone-Einsätze(2758)
- Keystone-Frontplatte, Frames(1926)
- Heavy Duty Steckverbinder-Einsätze, Module(4190)
- Schwerlastanschlüsse - Gehäuse, Kapuzen, Basen(17226)
- Heavy Duty Steckverbinder-Frames(523)
- Heavy Duty Steckverbinder-Kontakte(1832)
- Heavy Duty Steckverbinder-Baugruppen(671)
- LWL-Steckverbinder-Gehäuse(919)
- Glasfaser-Steckverbinder - Adapter(4455)
- LWL-Steckverbinder(3001)
- FFC, FPC (flache flexible) Steckverbinder - Gehäuse(652)
- FFC, FPC (flache flexible) Anschlüsse - Kontakte(202)
- FFC, FPC (flache flexible) Anschlüsse(18691)
- D-Sub, d-förmige Steckverbinder-Terminatoren(47)
- D-Sub, d-förmige Steckverbinder-Gehäuse(12238)
- D-Sub, d-förmige Steckverbinder-Kontakte(2714)
- D-Sub, D-förmige Steckverbinder-Rückenschalen, Kapuzen(5995)
- D-Sub, d-förmige Steckverbinder-Adapter(1304)
- D-Sub Steckverbinder(141346)
- D-förmige Steckverbinder-Centronics(8770)
- Kontakte, Frühling geladen und Druck(630)
- Kontakte-Multi Purpose(6196)
- Kontakte-"Leadframe"(122)
- Koaxial-Steckverbinder (RF)-Terminatoren(1231)
- Koaxial-Steckverbinder (RF)-Kontakte(480)
- Koaxial-Steckverbinder (RF)-Adapter(6386)
- Koaxialverbinder (RF)(25734)
- Rundsteckverbinder-Gehäuse(441226)
- Rundsteckverbinder-Kontakte(4737)
- Rundsteckverbinder-backschalen und Kabel-Klemmen(53692)
- Rundsteckverbinder-Adapter(8839)
- Rundanschlüsse(1196254)
- Card Edge Steckverbinder-Gehäuse(469)
- Karte Edge Verbinder-edgeboard Verbinder(672683)
- Card Edge Verbinder-Kontakte(325)
- Card Edge Verbinder-Adapter(73)
- Blade Type Power Steckverbinder-Gehäuse(837)
- Blade Type Power Connectors-Kontakte(393)
- Stromanbeter Blade Type(4163)
- Zwischen Serien-Adapter(649)
- Barrel-Stromanschluss(935)
- Barrel-Audio-Anschlüsse(2432)
- Barrel-Audio Adapter(92)
- Banana und Tip Steckverbinder-Buchsen, Stecker(1644)
- Banana and Tip Connectors-Binding Posts(239)
- Banana und Tip Steckverbinder-Adapter(75)
- Backplane Steckverbinder-spezialisiert(45586)
- Backplane Steckverbinder-Gehäuse(6863)
- Backplane Steckverbinder-Hard metrisch, Standard(6297)
- Backplane Steckverbinder-DIN 41612(9408)
- Backplane Steckverbinder-Kontakte(3583)
- Backplane Connectors-ARINC Einsätze(2357)
- Backplane Steckverbinder-ARINC(3789)
Relevanter Hersteller







-
Widerstände
-
Kondensatoren
Kondensatoren
- Aluminium-Elektrolytkondensatoren(16817)
- Trimmer, Variable Kondensatoren(3151)
- Dünne Folien-Kondensatoren(3473)
- Tantal-Kondensatoren(136103)
- Tantal-Polymer-Kondensatoren(9778)
- Silizium-Kondensatoren(320)
- Niob Oxide Kondensatoren(330)
- Mica und PTFE Kondensatoren(9101)
- Folien-Kondensatoren(150406)
- Elektrische Doppelschichtkondensatoren (EDLC), Superkondensatoren(2782)
- Keramische Kondensatoren(833829)
- Kondensatoren-Netzwerke, Arrays(2383)
- Aluminium-Elektrolytkondensatoren(125325)
- Aluminium-Polymer-Kondensatoren(7544)
Relevanter Hersteller






-
Transformatoren
Transformatoren
Relevanter Hersteller







-
Isolatoren
-
Kristalle, Oszillatoren, Resonatoren
Kristalle, Oszillatoren, Resonatoren
Relevanter Hersteller






-
Switches
Switches
- Verriegelungsschalter(2893)
- Emergency-Stop-Schalter (E-Stop)(1160)
- Kabelzugschalter(571)
- Toggle-Schalter(33608)
- Rändelrads Schalter(742)
- Schalter(14263)
- Snap-Aktion, Endschalter begrenzen(28077)
- Slide-Schalter(5166)
- Selector-Schalter(9720)
- Rotary Switches(13850)
- Rocker Schalter(53790)
- Drucktaste-Schalter-Hall-Effekt(127)
- Drucktaste Schalter(190826)
- Programmierbare Display-Switches(39)
- Navigations-Schalter, Joystick(1882)
- Magnetische, Reed-Schalter(1399)
- Keypad-Schalter(637)
- Keylock Schalter(3684)
- DIP Schalter(7747)
- Konfigurierbare Switch-Komponenten-Objektiv(1435)
- Konfigurierbare Schalter-Komponenten-Lichtquelle(1236)
- Konfigurierbare Switch-Komponenten-Contact Block(1401)
- Konfigurierbare Switch-Komponenten-Body(16077)
- Disconnect-Switch-Komponenten(2567)
Relevanter Hersteller






-
Relais
Relais
- Sicherheitsrelais(1310)
- Reedrelais(1735)
- Hochfrequenz (RF) -Relais(1190)
- Schütze (Festkörper)(686)
- Schütze (elektromechanisch)(11952)
- Kfz-Relais(1881)
- Solid State Relais(10652)
- Signal-Relais, bis zu 2 Ampere(9149)
- Relay-Sockets(2075)
- Power Relays, über 2 Ampere(31604)
- E / A-Relaismodule(712)
- I/o-Relay-Module-Input(2)
- I/o-Relay-Modul-Racks(247)
Relevanter Hersteller
















Sprache auswählen
Aktuelle Sprache
Deutsch
- English
- Deutsch
- Italia
- Français
- 日本語
- 한국의
- русский
- Svenska
- Nederland
- español
- Português
- polski
- Suomi
- Gaeilge
- Slovenská
- Slovenija
- Čeština
- Melayu
- Magyarország
- Hrvatska
- Dansk
- românesc
- Indonesia
- Ελλάδα
- Български език
- Afrikaans
- IsiXhosa
- isiZulu
- lietuvių
- Maori
- Kongeriket
- Монголулс
- O'zbek
- Tiếng Việt
- हिंदी
- اردو
- Kurdî
- Català
- Bosna
- Euskera
- العربية
- فارسی
- Corsa
- Chicheŵa
- עִבְרִית
- Latviešu
- Hausa
- Беларусь
- አማርኛ
- Republika e Shqipërisë
- Eesti Vabariik
- íslenska
- မြန်မာ
- Македонски
- Lëtzebuergesch
- საქართველო
- Cambodia
- Pilipino
- Azərbaycan
- ພາສາລາວ
- বাংলা ভাষার
- پښتو
- malaɡasʲ
- Кыргыз тили
- Ayiti
- Қазақша
- Samoa
- සිංහල
- ภาษาไทย
- Україна
- Kiswahili
- Cрпски
- Galego
- नेपाली
- Sesotho
- Тоҷикӣ
- Türk dili
- ગુજરાતી
- ಕನ್ನಡkannaḍa
- मराठी
Funktionsprinzip des Drehgebermoduls
Zeit: 2026/01/16
Durchsuchen: 632
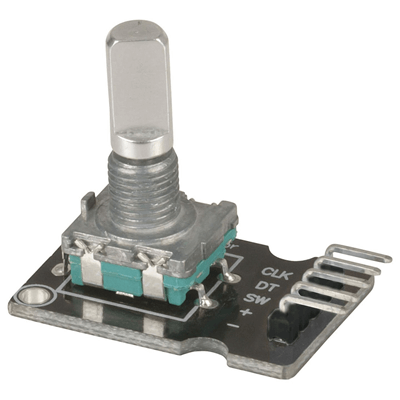
Ein Drehgebermodul ist ein Eingabegerät in der Elektronik, das es Systemen ermöglicht, Drehbewegungen zu erkennen und die Richtung mit hoher Zuverlässigkeit zu bestimmen.In diesem Artikel werden die Übersicht über das Drehgebermodul, Details zur Pinbelegung, Schaltungsbetrieb, Spezifikationen, Anwendungen und mehr erläutert.
Katalog
Übersicht über das Drehgebermodul
Ein Drehgebermodul ist ein Eingabegerät zur Erkennung der axialen Drehung und zur Bestimmung der Bewegungsrichtung (im Uhrzeigersinn oder gegen den Uhrzeigersinn).Es wandelt mechanische Drehungen in digitale Signale um, sodass ein System erkennen kann, wie weit und in welche Richtung der Knopf gedreht wird.Im Gegensatz zu Potentiometern messen Drehgeber keine absolute Position und können kontinuierlich rotieren.
Das einfache Kontakt-Drehgebermodul verwendet interne mechanische Kontakte, die sich öffnen und schließen, wenn sich die Welle dreht.Jeder Schritt erzeugt Impulssignale, die ein Mikrocontroller zählen und vergleichen kann, um die Drehrichtung zu ermitteln.Die meisten Module verfügen außerdem über einen Druckknopfschalter, wodurch sie für die Menüauswahl und Benutzereingabesteuerung geeignet sind.
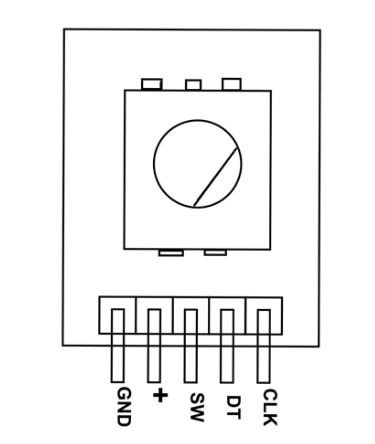
Details zur Pinbelegung des Drehgebermoduls
|
Pin
Name |
Etikett
auf Modul |
Beschreibung |
|
GND |
GND |
Boden
Verbindung.Verbinden Sie sich mit der Masse (0 V) des Mikrocontrollers. |
|
VCC |
+ |
Stromversorgung
Stift.Je nach Modul typischerweise an 3,3 V oder 5 V angeschlossen. |
|
Wechseln |
SW |
Druckknopf
Ausgabe.Geht auf LOW oder HIGH, wenn die Encoderwelle gedrückt wird. |
|
Daten |
DT |
Daten (Kanal B)
Ausgabe.Wird zur Bestimmung der Drehrichtung verwendet. |
|
Uhr |
CLK |
Uhr (Kanal
A) Ausgabe.Erzeugt Impulse, wenn sich der Encoder dreht. |
Schaltplan des Drehgebermoduls
Das untenstehende Schaltbild zeigt eine einfache Methode, um die Funktionsweise des M274-Drehgebermoduls mithilfe von LEDs zu verstehen.In diesem Aufbau wird das Modul über eine +5-V-Versorgung mit Strom versorgt, wobei der VCC-Pin (+) mit +5 V und der GND-Pin mit Masse verbunden ist.Die Ausgangspins CLK (A) und DT (B) sind über 220-Ω-Strombegrenzungswiderstände mit zwei LEDs (D1 und D2) verbunden.Diese LEDs dienen nur zur optischen Anzeige der Encoder-Ausgänge.Der SW-Pin (Druckknopf) wird in dieser Schaltung nicht verwendet und bleibt unbeschaltet, da der Fokus nur auf der Drehbewegung und -richtung liegt.
Um das in der Schaltung dargestellte Ausgangsverhalten zu verstehen, ist es wichtig, sich den inneren Aufbau des Drehgebers anzusehen.Im Inneren des Encoders befindet sich eine rotierende Scheibe, die in leitende (dunkle) und nicht leitende (weiße) Segmente unterteilt ist.Zwei interne Kontakte mit der Bezeichnung A und B gleiten über diese Scheibe, während sich die Welle dreht.Die leitenden Segmente sind intern mit +5 V verbunden. Wenn also ein Kontakt ein dunkles Segment berührt, wird der entsprechende Ausgang HIGH, und wenn er ein weißes Segment berührt, wird der Ausgang LOW.
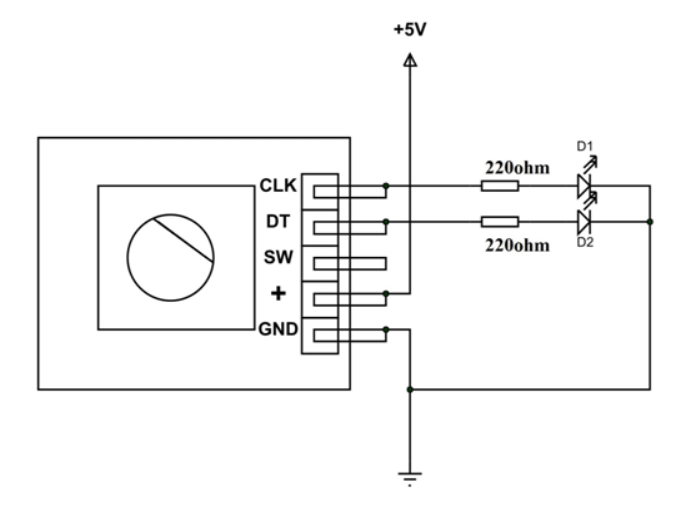
Wenn die Encoderwelle im Uhrzeigersinn gedreht wird, berührt Kontakt A ein leitendes Segment vor Kontakt B. Infolgedessen geht Ausgang A (CLK) zuerst auf HIGH, wodurch LED D1 eingeschaltet wird.Kurz darauf geht Ausgang B (DT) auf HIGH und LED D2 schaltet sich ein.Während sich die Drehung fortsetzt, verlässt Kontakt A zuerst das leitende Segment und bewegt sich zu einem nicht leitenden Segment, wodurch Ausgang A auf LOW geht und LED D1 ausgeschaltet wird.Als nächstes verlässt Kontakt B das leitende Segment, wodurch Ausgang B auf LOW geht und LED D2 ausgeschaltet wird.Diese EIN-AUS-Sequenz wiederholt sich bei jedem Rotationsschritt und erzeugt eine Reihe von Impulsen.
Wird die Encoderwelle entgegen dem Uhrzeigersinn gedreht, ist die Reihenfolge umgekehrt.Kontakt B berührt zuerst das leitende Segment, sodass Ausgang B (DT) vor Ausgang A auf HIGH geht. In der Schaltung schaltet sich zuerst LED D2 ein, gefolgt von LED D1, wenn Ausgang A auf HIGH geht.Die LEDs schalten sich auch in der gleichen umgekehrten Reihenfolge aus, wenn die Kontakte die leitenden Segmente verlassen.Diese umgekehrte Impulsreihenfolge weist eindeutig auf eine Drehung gegen den Uhrzeigersinn hin.
Jeder vollständige Zyklus von HIGH- und LOW-Signalen stellt einen kleinen Rotationsschritt dar.Anhand der Reihenfolge, in der die LEDs ein- und ausgeschaltet werden, lässt sich die Drehrichtung leicht erkennen.Wenn dieselben CLK- und DT-Signale anstelle von LEDs an einen Mikrocontroller angeschlossen werden, kann der Controller die Impulse zählen, um die Drehbewegung zu messen, und die Signalreihenfolge vergleichen, um die Drehrichtung zu bestimmen.
Typen von Drehgebermodulen
Drehgebermodule werden in verschiedene Typen eingeteilt, je nachdem, wie sie die Drehung erfassen und Ausgangssignale erzeugen.Jeder Typ bietet unterschiedliche Vorteile hinsichtlich Genauigkeit, Haltbarkeit, Kosten und Anwendungseignung.Das Verständnis dieser Unterschiede hilft bei der Auswahl des richtigen Encoders für Steuerungssysteme, Automatisierungsprojekte und elektronische Schnittstellen.
1. Inkrementeller Drehgeber
Der inkrementelle Drehgeber ist der am häufigsten verwendete Typ in elektronischen Projekten und industriellen Steuerungen.Es funktioniert, indem es eine Reihe elektrischer Impulse erzeugt, während sich die Welle dreht.Durch das Zählen dieser Impulse kann ein Controller die Rotationsgeschwindigkeit, Richtung und relative Position bestimmen.Da es nur Bewegungen verfolgt, gehen die Positionsinformationen verloren, wenn die Stromversorgung unterbrochen wird.Die meisten Inkrementalgeber verwenden zwei Ausgangskanäle, üblicherweise A und B genannt, die es dem System ermöglichen, die Drehrichtung anhand der Phasendifferenz zu erkennen.
2. Absoluter Drehgeber
Ein absoluter Drehgeber weist jeder Wellenposition einen eindeutigen digitalen Code zu.Dadurch ist die genaue Position immer bekannt, auch nach Ausschalten und Wiederherstellen der Stromversorgung.Aufgrund dieser Funktion werden Absolutwertgeber häufig in Anwendungen eingesetzt, bei denen präzise Positionierung und Zuverlässigkeit von entscheidender Bedeutung sind.Obwohl sie eine höhere Genauigkeit und Stabilität bieten, sind sie im Allgemeinen teurer als Inkrementalgeber.
3. Mechanischer (Kontakttyp) Drehgeber
Mechanische Drehgeber arbeiten mit internen Metallkontakten, die sich öffnen und schließen, wenn sich die Welle dreht.Diese Kontaktveränderungen erzeugen elektrische Signale, die eine Bewegung anzeigen.Aufgrund ihres einfachen Designs sind mechanische Encoder kostengünstig und werden häufig in Lautstärkereglern, Menünavigationsknöpfen und einfachen Benutzeroberflächen verwendet.Ständiger Körperkontakt kann jedoch im Laufe der Zeit zu Verschleiß führen, der die Genauigkeit und Lebensdauer beeinträchtigen kann.
4. Optischer Drehgeber
Optische Drehgeber verwenden eine Lichtquelle und eine geschlitzte oder gemusterte Scheibe zur Dreherkennung.Während sich die Scheibe dreht, passieren Lichtimpulse die Schlitze und werden von Sensoren erfasst, wodurch präzise Ausgangssignale erzeugt werden.Dieses Design ermöglicht eine hohe Auflösung und reibungslose Leistung, wodurch optische Encoder für Anwendungen geeignet sind, die eine genaue Bewegungsverfolgung erfordern.Ihre größte Einschränkung ist die Empfindlichkeit gegenüber Staub, Schmutz und Verunreinigungen.
5. Magnetischer Drehgeber
Magnetische Drehgeber basieren auf einem an der Welle angebrachten Magneten und Magnetsensoren zur Erkennung von Positionsänderungen.Da es keinen physischen Kontakt und keinen Lichtweg gibt, sind sie äußerst langlebig und resistent gegen Staub, Vibration und Feuchtigkeit.Diese Encoder funktionieren in rauen Umgebungen gut, obwohl ihre Auflösung normalerweise geringer ist als die optischer Encoder.
Spezifikationen des Drehgebermoduls
|
Parameter |
Typisch
Wert/Beschreibung |
|
Encodertyp |
Inkrementell
(Mechanisch / Optisch / Magnetisch) |
|
Ausgangssignal |
Digitaler Puls
(Quadratur A & B) |
|
Kanäle |
2 Kanäle (A,
B) + optionaler Druckknopf |
|
Betrieb
Spannung |
3,3 V – 5 V Gleichstrom |
|
Ausgabeschnittstelle |
Digital (TTL
kompatibel) |
|
Auflösung (PPR) |
20 – 600 Impulse
pro Umdrehung (modellabhängig) |
|
Rotation
Richtungserkennung |
Ja (im Uhrzeigersinn
& gegen den Uhrzeigersinn) |
|
Druckknopf
Ausgabe |
Ja (momentan
Schalter, optional) |
|
Kontakttyp |
Mechanisch
Kontakte / optischer Sensor / magnetischer Sensor |
|
Betrieb
Aktuell |
≤ 10 mA |
|
Maximale Rotation
Geschwindigkeit |
Bis zu 10.000 U/min
(Encoderabhängig) |
|
Entprellen
Erforderlich |
Ja (für
mechanische Typen) |
|
Betrieb
Temperatur |
−20 °C bis +70 °C |
|
Wellentyp |
Gerändelt /
D-Schaft |
|
Schaftdurchmesser |
6 mm (typisch) |
|
Montageart |
Panelmontage /
Leiterplattenmontage |
|
Modul
Abmessungen |
Variiert je nach Modell |
|
Gewicht |
Leicht |
|
Kompatibel
Controller
|
Arduino, ESP32,
ESP8266, Raspberry Pi, SPS |
Anwendungen für Drehgebermodule
• Lautstärke- und Klangregelung in Audioverstärkern und Lautsprechersystemen
• Menünavigation und Benutzereingabe in eingebetteten Systemen
• Geschwindigkeits- und Richtungssteuerung von Gleichstrommotoren und Schrittmotoren
• Positions- und Rotationserkennung in Robotikprojekten
• Eingabesteuerung für Arduino-, ESP8266- und ESP32-Projekte
• Industrielle Bedienfelder und Einstellknöpfe
• Frequenz- und Wertauswahl in digitalen Instrumenten
• Geräte mit Mensch-Maschine-Schnittstelle (HMI).
• Bedienknöpfe für Kamera, CNC und 3D-Drucker
• Hausautomation und intelligente Steuerungssysteme
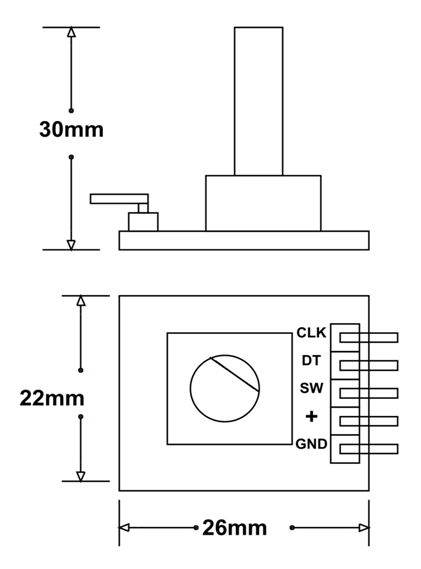
Mechanische Abmessungen
Vorteile und Einschränkungen
|
Vorteile |
Einschränkungen |
|
Ermöglicht unbegrenzt
360° Drehung |
Niedrigere Auflösung
im Vergleich zu optischen Encodern |
|
Erkennt beides
Drehung und Richtung |
Mechanisch
Kontakte können sich mit der Zeit abnutzen |
|
Einfach digital
Ausgang (CLK und DT) |
Kontaktabsprung
kann zu Signalrauschen führen |
|
Einfach zu
Schnittstelle zu Mikrocontrollern |
Erfordert
Software-Entprellung |
|
Funktioniert mit niedrig
Spannungen (3,3 V–5 V) |
Nicht geeignet für
sehr schnelle Rotation |
|
Kompakt und
kostengünstige Lösung |
Die Genauigkeit hängt davon ab
auf Detent-Zählung |
|
Inklusive
eingebauter Drucktaster (SW) |
Druckknopf hat
begrenzte mechanische Lebensdauer |
|
Ideal für Benutzer
Eingabe- und Bedienknöpfe |
Nicht dafür konzipiert
absolute Positionserfassung |
Fazit
Das Drehgebermodul ist eine effiziente Lösung zur Erkennung von Drehbewegungen und -richtungen sowohl bei Hobby- als auch bei professionellen Elektronikprojekten.Durch die Erzeugung von Quadratursignalen über seine CLK- und DT-Ausgänge ermöglicht es eine genaue Verfolgung der Drehung im Uhrzeigersinn und gegen den Uhrzeigersinn, während der optionale Druckknopfschalter zusätzliche Eingangsfunktionen hinzufügt.Aufgrund seiner einfachen Schaltkreisbedienung, des großen Betriebsspannungsbereichs und der einfachen Anbindung an gängige Mikrocontroller eignet es sich für ein breites Anwendungsspektrum, von der Steuerung der Benutzeroberfläche bis zur Einstellung der Motorgeschwindigkeit.
Häufig gestellte Fragen [FAQ]
1. Wie entprellt man ein Drehgebermodul richtig?
Mechanische Drehgeber erzeugen Kontaktprellen, die zu falschen Zählungen führen können.Die Entprellung kann in Software mithilfe von Verzögerungen, Zustandsänderungsfiltern oder Bibliotheken oder in Hardware mithilfe von RC-Filtern oder Schmitt-Trigger-Eingängen erfolgen.
2. Benötigen Drehgebermodule Pull-Up-Widerstände?
Ja, die meisten kontaktbehafteten Drehgeber funktionieren am besten mit Pull-up-Widerständen an den CLK- und DT-Pins.Viele Mikrocontroller verfügen über interne Pullups, die aktiviert werden können, um die Verkabelung zu vereinfachen.
3. Wie viele Impulse erzeugt ein Drehgeber pro Umdrehung?
Ein typischer Encoder mit 20 Rastungen erzeugt 20 mechanische Schritte, aber je nachdem, wie die Signale gezählt werden (1×, 2× oder 4× Decodierung), kann die effektive Impulszahl höher sein.
4. Was ist der Unterschied zwischen Rastungen und Impulsen bei einem Drehgeber?
Rastungen sind die physischen „Klicks“, die Sie spüren, wenn Sie den Knopf drehen, während Impulse die elektrischen Signalübergänge sind, die von den Encoder-Ausgängen erzeugt werden.
5. Kann ein Drehgebermodul mit Interrupts verwendet werden?
Ja, die Verwendung von Interrupts an CLK- oder DT-Pins ermöglicht eine genaue und reaktionsschnelle Erkennung der Drehung, insbesondere in Anwendungen, bei denen ein präzises Eingangstiming wichtig ist.
6. Warum überspringt mein Drehgeber Schritte oder zählt sie falsch?
Das Überspringen oder Fehlzählen wird normalerweise durch Kontaktprellen, verrauschte Kabel oder langsame Abfragen in der Software verursacht.Eine ordnungsgemäße Entprellung und eine saubere Signalverarbeitung lösen die meisten Probleme.
7. Können Drehgebermodule mit langen Leitungen betrieben werden?
Lange Kabel können zu Rauschen und unzuverlässigen Signalen führen.Die Verwendung kürzerer Kabel, verdrillter Paare, Pull-up-Widerstände oder Signalfilterung trägt zur Aufrechterhaltung der Genauigkeit bei.
8. Ist ein Drehgeber für Benutzereingaben besser als ein Potentiometer?
Drehgeber eignen sich besser für unbegrenzte Drehung und menübasierte Steuerung, während Potentiometer besser geeignet sind, wenn eine absolute Position oder ein analoger Wert erforderlich ist.
Verwandter Artikel
-
![Vollständige Anleitung zum PT100-RTD-Sensor Typ TF101]() Jan 16 2026Vollständige Anleitung zum PT100-RTD-Sensor Typ TF101
Jan 16 2026Vollständige Anleitung zum PT100-RTD-Sensor Typ TF101Unter den vielen verfügbaren Temperatursensoren genießen PT100-RTD-Sensoren aufgrund ihrer hohen Genauigkeit, Stabilität und standardisierten Eigen... -
![Anleitung zum Regentropfensensormodul: Schaltplan, Pinbelegung und Funktionen]() Jan 15 2026Anleitung zum Regentropfensensormodul: Schaltplan, Pinbelegung und Funktionen
Jan 15 2026Anleitung zum Regentropfensensormodul: Schaltplan, Pinbelegung und FunktionenDie Regenerkennung wird in vielen Automatisierungs-, Überwachungs- und Schutzsystemen eingesetzt.Wenn Sie wissen, wann Regen einsetzt oder aufhört, ...


Verwandte -Produkte

CGA6L3C0G2E223J160AA
CAP CER 0.022UF 250V C0G 1210

CL31B333KBCNNNC
CAP CER 0.033UF 50V X7R 1206

CGJ3E2X7R1H473K080AA
CAP CER 0.047UF 50V X7R 0603

CC0100JRNPO6BN101
CAP CER 100PF 10V C0G/NPO 01005

TAP225M010CRW
CAP TANT 2.2UF 20% 10V RADIAL

T496X476K020AT
CAP TANT 47UF 10% 20V 2917

LT4363IDE-2#PBF
IC SURGE STOPPER HV 12-DFN

ADS8866IDGSR
IC ADC 16BIT SAR 10VSSOP

RT0603BRD0775KL
RES SMD 75K OHM 0.1% 1/10W 0603

LXT901APC
INTEL PLCC

MT46H32M32LFB5-6IT:B
MT46H32M32LFB5-6IT:B MICRON

MN101E16KKA
MN101E16KKA PANASONIC

SN75ALS1178NS
IC TRANSCEIVER FULL 2/2 16SO