Alle Kategorien
-
Integrierte schaltkreise (ICS)
Integrierte schaltkreise (ICS)
- Schnittstelle - Sensor, kapazitive Berührung(642)
- Spezialisierte ICS(12302)
- PMIC-Spannungsregler-besonderer Zweck(5644)
- PMIC-Spannungsregler-lineare Regler(793)
- PMIC-Spannungsregler-linear + Switching(1829)
- PMIC-Spannungsregler-linear(70981)
- PMIC-Spannungsregler-DC DC Switching Regulators(39569)
- PMIC-Regler-DC-DC-Switching-Controller(13507)
- PMIC-Spannungs-Referenz(9453)
- PMIC-v/f und f/v-Wandler(145)
- PMIC-Thermal Management(592)
- PMIC-Supervisor(47946)
- PMIC-RMS bis DC-Wandler(170)
- PMIC-Netzteil-Controller, Monitore(2104)
- PMIC-Power over Ethernet (PoE) Controller(1008)
- PMIC-Power Management-spezialisierte(7722)
- PMIC-Netzschalter, Treiber laden(7706)
- PMIC-PFC (Power Factor Correction)(1222)
- PMIC oder Steuerungen, ideale Dioden(705)
- PMIC-Motor-Treiber, Regler(4712)
- PMIC-Beleuchtung, Ballast-Regler(560)
- PMIC-LED-Treiber(7282)
- PMIC-Laser-Treiber(573)
- PMIC-Hot-Swap-Controller(2816)
- PMIC-Gate-Treiber(7083)
- PMIC-voll, Half-Bridge-Treiber(1342)
- PMIC-Energy Messung(654)
- PMIC-Display-Treiber(1435)
- PMIC-derzeitige Regulierung/Management(1481)
- PMIC-Batterie-Management(5553)
- PMIC-Ladegeräte(3831)
- PMIC-AC DC Konverter, Offline Schalter(4905)
- Memory-Controller(358)
- Memory-Konfigurations-Proms für FPGAs(639)
- Speicher-Akkus(13)
- Erinnerung(65694)
- Logic-universelle Bus-Funktionen(706)
- Logic-Übersetzer, Level-Shifter(2854)
- Logik-Specialty Logic(1870)
- Logik-Signal-Schalter, Multiplexer, Decoder(9420)
- Logic-Shift-Register(2665)
- Logic-Parity Generatoren und Checkers(335)
- Logic-multivibratoren(831)
- Logik-Latches(3658)
- Logik - Tore und Wechselrichter - Multifunktion, konfigurierbar(1687)
- Logik-Tore und Wechselrichter(16453)
- Logic-Flip Flops(7780)
- Logik-FIFOs Speicher(4240)
- Logik-Zähler, Trennlinien(3456)
- Logik-Vergleichsoperator(592)
- Logik-Puffer, Treiber, Receiver, Transceiver(17835)
- Linear-Video-Verarbeitung(2909)
- Linear-Vergleichsoperator(5084)
- Linear-analoge Multiplikatoren, Trennwände(263)
- Linear-Verstärker-Video Amps und Module(1905)
- Linear-Verstärker-Spezial-Zweck(1856)
- Linear - Verstärker - Instrumentierung, OP -Verstärker, Pufferverstärker(34236)
- Linear-Verstärker-Audio(4567)
- Interface-Voice Record und Playback(556)
- Schnittstelle - UARTs (Universal Asynchronous Receivers -Sender)(1236)
- Schnittstelle-Telecom(4467)
- Interface-spezialisierte(4833)
- Interface-Signal Terminatoren(333)
- Interface-Signal-Puffer, Repeater, Splitter(1449)
- Interface-Serializer, Deserializer(1480)
- Schnittstellen-Sensor und Detektor-Interfaces(1524)
- Interface-Module(169)
- Interface-Modems-ICS und Module(407)
- Interface-e/a-Expander(1136)
- Interface-Filter-aktiv(1226)
- Interface-Encoder, Decoder, Konverter(714)
- Interface-Treiber, Receiver, Transceiver(20755)
- Interface-Direct Digital Synthesis (DDS)(117)
- Interface-Controller(3628)
- Interface-Codecs(1676)
- Schnittstelle - Analoge Switches, Multiplexer, Demultiplexer(12567)
- Schnittstelle-analoge Schalter-spezieller Zweck(2533)
- Embedded-System on Chip (SoC)(4496)
- Embedded-PLDs (programmierbare Logik-Vorrichtung)(971)
- Embedded-Mikroprozessoren(10083)
- Embedded-Mikrocontroller-anwendungsspezifische(2275)
- Embedded-Mikrocontroller(99285)
- Eingebettet - Mikrocontroller, Mikroprozessor, FPGA -Module(1527)
- Eingebettet - FPGAs (Feldprogrammiergate -Array) mit Mikrocontrollern(81)
- Embedded-FPGAs (Field Programmable Gate Array)(27748)
- Embedded-DSP (Digital Signal Processors)(4081)
- Eingebettet - CPLDs (komplexe programmierbare Logikgeräte)(5187)
- Datenerfassung-Touch Screen Controller(1210)
- Datenerfassung-Digital to Analog Converter (DAC)(14419)
- Datenerfassung-digitale Potentiometer(6250)
- Datenerfassung-analog zu Digital Converters (ADC)(17776)
- Datenerfassung-analoges Frontend (AFE)(787)
- Datenerfassung-MDE/DACs-spezieller Zweck(3043)
- Clock/Timing-Uhren in Echtzeit(2446)
- Uhr/Timing - programmierbare Timer und Oszillatoren(23469)
- Clock/Timing-IC-Akkus(4)
- Takt/Timing-Delay Lines(1049)
- Uhr/Timing - Uhrengeneratoren, PLLS, Frequenzsynthesizer(32775)
- Clock/Timing-Clock Puffer, Treiber(4568)
- Clock/Timing-anwendungsspezifische(8652)
- Audio Spezial-Zweck(1564)
Relevanter Hersteller







-
Diskrete Halbleiter-Produkte
Diskrete Halbleiter-Produkte
- Aktuelle Regulierung - Dioden, Transistoren(1090)
- Transistoren-besonderer Zweck(226)
- Transistoren-programmierbare Unijunction(48)
- Transistoren-jfets(1558)
- Transistoren-IGBTs-Einzel(4799)
- Transistoren-IGBTs-Module(63420)
- Transistoren-IGBTs-Arrays(26)
- Transistoren-FETs, MOSFETs-Einzel(48330)
- Transistoren-FETs, MOSFETs-RF(4903)
- Transistoren-FETs, MOSFETs-Arrays(6641)
- Transistoren-Bipolar (BJT)-einzeln, Pre-biased(4539)
- Transistoren-Bipolar (BJT)-Einzel(25800)
- Transistoren-Bipolar (BJT)-RF(2087)
- Transistoren-bipolare (BJT)-Arrays, Pre-biased(2115)
- Transistoren-bipolare (BJT)-Arrays(2310)
- Thyristor-triacs(4044)
- Thyristoren-SCRs-Module(3967)
- Thyristoren-SCRs(5436)
- Thyristoren-diacs, sidacs(319)
- Power Driver Module(1627)
- Dioden-zenerdioden-Einzel(87483)
- Dioden-zenerdioden-Arrays(2619)
- Dioden - variable Kapazität (Varik, Varaktoren)(1200)
- Dioden-RF(2753)
- Dioden-Gleichrichter-Einzel(67528)
- Dioden-Gleichrichter-Arrays(20581)
- Dioden-Brücke-Gleichrichter(11700)
Relevanter Hersteller




-
RF/if und RFID
RF/if und RFID
- SIM -Karten für Abonnenten -Identifikationsmodul (SIM)(77)
- RF -Zirkulatoren und Isolatoren(1742)
- RFID, RF-Zugang, Monitoring-ICS(1550)
- RFID Transponder, Tags(747)
- RFID Lesegeräte(464)
- RFID -Bewertungs- und Entwicklungskits, Boards(30)
- RFID Antennen(329)
- RFI und EMI - Abschirm- und Absorbungsmaterialien(6444)
- HF und EMI-Kontakte, Fingerstock und Dichtungen(7497)
- RF Transmitter(668)
- RF Transceiver Module(6900)
- RF-Transceiver ICS(4169)
- HF-Schalter(9276)
- RF Shields(16401)
- HF-Receiver(1998)
- HF -Empfänger, Sender und Transceiver -Einheiten(2763)
- RF Power Divider/Splitter(1223)
- RF Power Controller ICs(86)
- HF-Modulatoren(710)
- HF-Mixer(2800)
- RF misc ICS und Module(3276)
- HF-Front-End (LNA + PA)(419)
- RF -Bewertungs- und Entwicklungskits, Boards(747)
- HF-gerichtete Kupplung(2718)
- RF Diplexer(1464)
- RF-Detektoren(412)
- RF-Demodulatoren(249)
- HF-Antennen(12319)
- HF-Verstärker(19651)
- Balun(1496)
- Dämpfungsglieder(4852)
Relevanter Hersteller







-
Optoelektronik
Optoelektronik
- Optomechanisch(480)
- Leuchten(125)
- Laserdioden, Lasermodule - Laserlieferung, Laserfasern(345)
- Hene Lasersysteme(31)
- Hene Laserköpfe(27)
- Hintergrundbeleuchtung anzeigen(93)
- Xenon-Beleuchtung(387)
- Touchscreen-Overlays(453)
- Panel Indicators, Pilot Lights(75729)
- Optik-Remote-Phosphor-Lichtquelle(269)
- Optik-Reflektoren(665)
- Optik-leichte Rohre(5384)
- Optik-Objektive(4951)
- LEDs-Spacer, Unentschieden(2718)
- LEDs-Lamp-Ersetzungen(29718)
- LEDs - Leiterplattenindikatoren, Arrays, Lichtstäbe, Balkendiagramme(9083)
- LED-thermische Produkte(667)
- LED-Beleuchtung(64)
- LED-Beleuchtung-weiß(37580)
- LED-Beleuchtung-Farbe(4728)
- LED-Beleuchtung-Maiskolben, Motoren, Module(28735)
- LED-Anzeige-diskret(27601)
- Laserdioden, Module(1553)
- Lampen-Glühlampen, Neons(311004)
- Lampen-Kälte-Fluoreszenz (KKL) & UV(164)
- Wechselrichter(7728)
- Infrarot, UV, sichtbare Strahler(3871)
- Fiber Optics-Transmitter-Antrieb integriert(4085)
- Fiber Optics-Transmitter-diskrete(350)
- Fiber Optics-Transceiver Module(18758)
- Fiberoptik-Switches, Multiplexer, Demultiplexer(1387)
- Fiberoptik-Receiver(695)
- Fiberoptik-Dämpfung(654)
- Elektrolumineszenz(102)
- Display, Monitor-Interface Controller(98)
- Display-Module-Vakuum-Leuchtstofflampen (VFD)(249)
- Module anzeigen-LED Dot Matrix und Cluster(865)
- Display-Module-LED-Zeichen und numerische(5421)
- Display-Module-LCD, OLED, Graphic(4654)
- Display-Module-LCD, OLED-Zeichen und numerische(2202)
- Display-Blenden, Objektive(88)
- Adresse, Spezialität(458)
Relevanter Hersteller







-
Sensoren, Wandler
Sensoren, Wandler
- Ultraschallempfänger, Sender - Industrial(115)
- Temperatursensoren - Thermostate - Mechanisch - Industrielles(3103)
- Temperatursensoren - Analog und digitaler Ausgang - Industrial(209)
- Näherungssensoren - Industrial(13611)
- Drucksensoren, Wandler - Industrie(26503)
- Optische Sensoren - Photonik - Zähler, Detektoren, SPCM (Einzelphotonzählmodul)(751)
- Optische Sensoren - Kameramodule(875)
- Magnetsensoren - Position, Nähe, Geschwindigkeit (Module) - Industrie(554)
- Kraftsensoren - Industrial(346)
- Flusssensoren - Industrielles(151)
- Float, Level Sensoren - Industrial(310)
- Encoder - Industrial(4980)
- Farbsensoren - Industrial(50)
- Berührungssensoren(100)
- Ultraschall-Receiver, Transmitter(2421)
- Temperatursensoren-Thermostat-Solid State(1096)
- Temperatursensoren-Thermostate-mechanisch(3397)
- Temperatursensoren - Thermoelemente, Temperatursonden(1921)
- Temperatursensoren - RTD (Widerstandstemperaturdetektor)(1525)
- Temperatursensoren-PTC-Thermistoren(2273)
- Temperatursensoren-ntc-thermistoren(13259)
- Temperatursensoren-Analog und Digital Output(3928)
- DMS(1399)
- Spezialisierte Sensoren(1861)
- Solarzellen(503)
- Schock-Sensoren(84)
- Sensor-Interface-Junction-Blöcke(2519)
- Sensor-Kabel-Baugruppen(22011)
- Proximity/Belegung Sensoren-fertige Einheiten(725)
- Näherungsschalter(2860)
- Drucksensoren, Wandler(11317)
- Positionssensoren - Winkel, lineare Positionsmessung(6022)
- Optische Sensoren-reflektierende-Logik-Ausgang(194)
- Optische Sensoren - reflektierend - analoge Ausgang(432)
- Optische Sensoren-Phototransistoren(1027)
- Optische Sensoren - Photointerrupter - Schlitztyp - Transistorausgang(1427)
- Optische Sensoren - Photointerrupter - Schlitztyp - Logikausgabe(1215)
- Optische Sensoren-Lichtschranke, Industrial(16763)
- Optische Sensoren-Photodioden(1543)
- Optische Sensoren-Foto-Detektoren-Remote Receiver(2605)
- Optische Sensoren-Foto-Detektoren-Logik-Ausgang(146)
- Optische Sensoren-Foto-Detektoren-CDs-Zellen(74)
- Optische Sensoren-Distanz-Messung(377)
- Optische Sensoren-Ambient Light, IR, UV Sensoren(1305)
- Multifunktions(558)
- Motion Sensors-Vibration(337)
- Motion Sensors-Tilt Schalter(67)
- Bewegungsmelder-optisch(719)
- Motion Sensors-Neigungssensoren(175)
- Motion Sensors-Imus (Trägheit-Maßeinheiten)(416)
- Motion Sensors-Kreisel(214)
- Motion Sensors-Beschleunigungsmesser(1911)
- Magnete-Sensor abgestimmt(119)
- Magnete-Multi Purpose(1965)
- Magnetische Sensoren-Schalter (Solid State)(3700)
- Magnetsensoren - Position, Nähe, Geschwindigkeit (Module)(5199)
- Magnetische Sensoren-linear, Kompass (ICS)(1247)
- Magnetsensoren - Kompass, Magnetfeld (Module)(35)
- LVDT -Wandler (linearer variabler Differentialtransformator)(204)
- IrDA Transceiver-Module(196)
- Bildsensor, Kamera(2235)
- Feuchtigkeit-Sensoren(1425)
- Gas-Sensoren(1217)
- Force Sensoren(188)
- Durchfluss-Sensoren(550)
- Float, Level Sensoren(1343)
- Encoder(6357)
- Staub-Sensoren(43)
- Aktuelle Wandler(3455)
- Color Sensoren(85)
- Verstärker(1905)
Relevanter Hersteller







-
Anschlüsse, Verbindungen
Anschlüsse, Verbindungen
- USB, DVI, HDMI -Stecker(446)
- Festkörperbeleuchtungsstecker(555)
- Steckdosen für ICs, Transistoren(953)
- Steckbare Steckverbinder(1221)
- Photovoltaik (Solarpanel) Anschlüsse(136)
- Glasfaseranschlüsse(370)
- FFC, FPC (flache flexible) Anschlüsse(761)
- D-Sub, D-förmige Stecker(2887)
- Koaxialverbinder (RF)(2389)
- Rundanschlüsse(14162)
- Stromanbeter Blade Type(273)
- Stecker und Behälter(2597)
- USB, DVI, HDMI Stecker-Adapter(572)
- USB, DVI, HDMI -Stecker(4298)
- Klemmen-Wire to Board Steckverbinder(217)
- Klemmen-Draht-Steckverbinder(4322)
- Klemmen-Draht-Pin Stecker(328)
- Terminals-Revolver Steckverbinder(1273)
- Terminals-spezialisierte Steckverbinder(2042)
- Klemmen-Spaten Verbinder(3902)
- Klemmen-Löten/Stecker(345)
- Klemmen-Verschraubungen(745)
- Klemmen-Ring Steckverbinder(12596)
- Klemmen-rechteckige Steckverbinder(4747)
- Terminals - Schnellverbindungen, schnelle Trennungsanschlüsse(8514)
- Klemmen-PC PIN, Single Post Connectors(3776)
- Klemmen-PC-Pin-Buchsen, Sockel-Steckverbinder(5883)
- Klemmen-magnetische Draht-Steckverbinder(1653)
- Klemmen-Messer Steckverbinder(112)
- Klemmen-Gehäuse, Stiefel(2850)
- Klemmen-Folie Steckverbinder(108)
- Klemmen-Barrel, Bullet-Steckverbinder(1107)
- Klemmen-Adapter(137)
- Terminal-Streifen und Revolver-Boards(1159)
- Terminal Junction Systeme(2533)
- Anschlussblöcke-Draht an Bord(43615)
- Terminal Blocks-spezialisierte(3722)
- Terminal Blocks-Power Distribution(847)
- Anschlussblöcke-Panel Mount(1359)
- Terminal Blocks-Interface Module(1819)
- Anschlussblöcke-Kopfzeilen, Stecker und Buchsen(119920)
- Anschlussblöcke-DIN-Schiene, Kanal(9373)
- Anschlussblöcke-Kontakte(65)
- Anschlussblöcke-Barrier Blocks(47517)
- Anschlussblöcke-Adapter(1059)
- Solid State Lighting Verbinder-Kontakte(271)
- Festkörperbeleuchtungsstecker(1344)
- Buchsen für ICS, Transistoren-Adapter(275)
- Steckdosen für ICs, Transistoren(22148)
- Shunts, Jumper(907)
- Rechteckige Verbinder-Feder geladen(7721)
- Rechteckige Steckverbinder-Gehäuse(43023)
- Rechteckige Verbinder-Kopfzeilen, Spezial-PIN(6129)
- Rechteckige Anschlüsse - Header, Gefäße, weibliche Sockel(229601)
- Rechteckige Verbinder-Kopfzeilen, männliche Pins(543338)
- Rechteckige Anschlüsse - kostenloses Hängen, Panelhalterung(30142)
- Rechteckige Verbinder-Kontakte(10681)
- Rechteckige Anschlüsse - Board in, Direktdraht zum Board(2432)
- Rechteckige Verbinder-Adapter(475)
- Rechteckig - Brett zu Board -Steckern - Header, Behälter, weibliche Sockel(9)
- Rechteckig - Brett zu Board -Steckern - Header, männliche Stifte(2)
- Rechteckige Anschlüsse - Board -Abstandshalter, Stacker (Board zu Board)(238901)
- Rechteckige Anschlüsse - Arrays, Kantentyp, Mezzanin (Board zu Board)(37853)
- Stromanschluss-Eingänge, Steckdosen, Module(10310)
- Steckbare Steckverbinder(6049)
- Photovoltaik- (Solarpanel) Anschlüsse - Kontakte(77)
- Photovoltaik (Solarpanel) Anschlüsse(504)
- Modulare Steckverbinder-Verdrahtung Blöcke(99)
- Modulare Steckverbinder-Stecker(1674)
- Modulare Steckverbinder-Stecker Gehäuse(181)
- Modulare Steckverbinder-Buchsen mit magnetischen(10152)
- Modulare Steckverbinder-Buchsen(23416)
- Modulare Steckverbinder-Adapter(855)
- Memory Connectors-PC Cards-Adapter(21)
- Memory Connectors-PC Card Sockets(3299)
- Memory Connectors-Inline Modul Sockets(3390)
- LGH Steckverbinder(764)
- Keystone-Einsätze(2758)
- Keystone-Frontplatte, Frames(1926)
- Heavy Duty Steckverbinder-Einsätze, Module(4190)
- Schwerlastanschlüsse - Gehäuse, Kapuzen, Basen(17226)
- Heavy Duty Steckverbinder-Frames(523)
- Heavy Duty Steckverbinder-Kontakte(1832)
- Heavy Duty Steckverbinder-Baugruppen(671)
- LWL-Steckverbinder-Gehäuse(919)
- Glasfaser-Steckverbinder - Adapter(4455)
- LWL-Steckverbinder(3001)
- FFC, FPC (flache flexible) Steckverbinder - Gehäuse(652)
- FFC, FPC (flache flexible) Anschlüsse - Kontakte(202)
- FFC, FPC (flache flexible) Anschlüsse(18691)
- D-Sub, d-förmige Steckverbinder-Terminatoren(47)
- D-Sub, d-förmige Steckverbinder-Gehäuse(12238)
- D-Sub, d-förmige Steckverbinder-Kontakte(2714)
- D-Sub, D-förmige Steckverbinder-Rückenschalen, Kapuzen(5995)
- D-Sub, d-förmige Steckverbinder-Adapter(1304)
- D-Sub Steckverbinder(141346)
- D-förmige Steckverbinder-Centronics(8770)
- Kontakte, Frühling geladen und Druck(630)
- Kontakte-Multi Purpose(6196)
- Kontakte-"Leadframe"(122)
- Koaxial-Steckverbinder (RF)-Terminatoren(1231)
- Koaxial-Steckverbinder (RF)-Kontakte(480)
- Koaxial-Steckverbinder (RF)-Adapter(6386)
- Koaxialverbinder (RF)(25734)
- Rundsteckverbinder-Gehäuse(441226)
- Rundsteckverbinder-Kontakte(4737)
- Rundsteckverbinder-backschalen und Kabel-Klemmen(53692)
- Rundsteckverbinder-Adapter(8839)
- Rundanschlüsse(1196254)
- Card Edge Steckverbinder-Gehäuse(469)
- Karte Edge Verbinder-edgeboard Verbinder(672683)
- Card Edge Verbinder-Kontakte(325)
- Card Edge Verbinder-Adapter(73)
- Blade Type Power Steckverbinder-Gehäuse(837)
- Blade Type Power Connectors-Kontakte(393)
- Stromanbeter Blade Type(4163)
- Zwischen Serien-Adapter(649)
- Barrel-Stromanschluss(935)
- Barrel-Audio-Anschlüsse(2432)
- Barrel-Audio Adapter(92)
- Banana und Tip Steckverbinder-Buchsen, Stecker(1644)
- Banana and Tip Connectors-Binding Posts(239)
- Banana und Tip Steckverbinder-Adapter(75)
- Backplane Steckverbinder-spezialisiert(45586)
- Backplane Steckverbinder-Gehäuse(6863)
- Backplane Steckverbinder-Hard metrisch, Standard(6297)
- Backplane Steckverbinder-DIN 41612(9408)
- Backplane Steckverbinder-Kontakte(3583)
- Backplane Connectors-ARINC Einsätze(2357)
- Backplane Steckverbinder-ARINC(3789)
Relevanter Hersteller







-
Widerstände
-
Kondensatoren
Kondensatoren
- Aluminium-Elektrolytkondensatoren(16817)
- Trimmer, Variable Kondensatoren(3151)
- Dünne Folien-Kondensatoren(3473)
- Tantal-Kondensatoren(136103)
- Tantal-Polymer-Kondensatoren(9778)
- Silizium-Kondensatoren(320)
- Niob Oxide Kondensatoren(330)
- Mica und PTFE Kondensatoren(9101)
- Folien-Kondensatoren(150406)
- Elektrische Doppelschichtkondensatoren (EDLC), Superkondensatoren(2782)
- Keramische Kondensatoren(833829)
- Kondensatoren-Netzwerke, Arrays(2383)
- Aluminium-Elektrolytkondensatoren(125325)
- Aluminium-Polymer-Kondensatoren(7544)
Relevanter Hersteller






-
Transformatoren
Transformatoren
Relevanter Hersteller







-
Isolatoren
-
Kristalle, Oszillatoren, Resonatoren
Kristalle, Oszillatoren, Resonatoren
Relevanter Hersteller






-
Switches
Switches
- Verriegelungsschalter(2893)
- Emergency-Stop-Schalter (E-Stop)(1160)
- Kabelzugschalter(571)
- Toggle-Schalter(33608)
- Rändelrads Schalter(742)
- Schalter(14263)
- Snap-Aktion, Endschalter begrenzen(28077)
- Slide-Schalter(5166)
- Selector-Schalter(9720)
- Rotary Switches(13850)
- Rocker Schalter(53790)
- Drucktaste-Schalter-Hall-Effekt(127)
- Drucktaste Schalter(190826)
- Programmierbare Display-Switches(39)
- Navigations-Schalter, Joystick(1882)
- Magnetische, Reed-Schalter(1399)
- Keypad-Schalter(637)
- Keylock Schalter(3684)
- DIP Schalter(7747)
- Konfigurierbare Switch-Komponenten-Objektiv(1435)
- Konfigurierbare Schalter-Komponenten-Lichtquelle(1236)
- Konfigurierbare Switch-Komponenten-Contact Block(1401)
- Konfigurierbare Switch-Komponenten-Body(16077)
- Disconnect-Switch-Komponenten(2567)
Relevanter Hersteller






-
Relais
Relais
- Sicherheitsrelais(1310)
- Reedrelais(1735)
- Hochfrequenz (RF) -Relais(1190)
- Schütze (Festkörper)(686)
- Schütze (elektromechanisch)(11952)
- Kfz-Relais(1881)
- Solid State Relais(10652)
- Signal-Relais, bis zu 2 Ampere(9149)
- Relay-Sockets(2075)
- Power Relays, über 2 Ampere(31604)
- E / A-Relaismodule(712)
- I/o-Relay-Module-Input(2)
- I/o-Relay-Modul-Racks(247)
Relevanter Hersteller
















Sprache auswählen
Aktuelle Sprache
Deutsch
- English
- Deutsch
- Italia
- Français
- 日本語
- 한국의
- русский
- Svenska
- Nederland
- español
- Português
- polski
- Suomi
- Gaeilge
- Slovenská
- Slovenija
- Čeština
- Melayu
- Magyarország
- Hrvatska
- Dansk
- românesc
- Indonesia
- Ελλάδα
- Български език
- Afrikaans
- IsiXhosa
- isiZulu
- lietuvių
- Maori
- Kongeriket
- Монголулс
- O'zbek
- Tiếng Việt
- हिंदी
- اردو
- Kurdî
- Català
- Bosna
- Euskera
- العربية
- فارسی
- Corsa
- Chicheŵa
- עִבְרִית
- Latviešu
- Hausa
- Беларусь
- አማርኛ
- Republika e Shqipërisë
- Eesti Vabariik
- íslenska
- မြန်မာ
- Македонски
- Lëtzebuergesch
- საქართველო
- Cambodia
- Pilipino
- Azərbaycan
- ພາສາລາວ
- বাংলা ভাষার
- پښتو
- malaɡasʲ
- Кыргыз тили
- Ayiti
- Қазақша
- Samoa
- සිංහල
- ภาษาไทย
- Україна
- Kiswahili
- Cрпски
- Galego
- नेपाली
- Sesotho
- Тоҷикӣ
- Türk dili
- ગુજરાતી
- ಕನ್ನಡkannaḍa
- मराठी
MPU9250 9-DoF-Sensor: Funktionsweise, Spezifikationen und Designtipps
Zeit: 2026/03/3
Durchsuchen: 6
Der 9-Achsen-Digital-Motion-Prozessor MPU9250 ist eine hochintegrierte Motion-Tracking-Lösung.In diesem Artikel werden die MPU9250-Übersicht, Pinbelegungsdetails, Funktionsarchitektur, Spezifikationen, Funktionen, Schnittstellenkonfigurationen, Anwendungen, Vergleiche und mechanische Abmessungen erläutert.

Katalog
Übersicht über den MPU9250-Sensor
Die MPU9250 Der 9-Achsen-Digital-Motion-Prozessor (DMP) ist ein kompaktes Bewegungsverfolgungsmodul, das ein 3-Achsen-Gyroskop, einen 3-Achsen-Beschleunigungsmesser und ein 3-Achsen-Magnetometer in einem einzigen kleinen Paket integriert.Diese 9-Achsen-Integration ermöglicht es dem Gerät, Rotations-, Beschleunigungs- und Magnetfelddaten für eine genaue Ausrichtung und Bewegungserkennung in eingebetteten Systemen zu messen.
Einer seiner Hauptvorteile ist der integrierte Digital Motion Processor™ (DMP), der die Sensorfusion intern durchführt.Es kombiniert die Daten aller Sensoren, übernimmt die Filterung und Kalibrierung und reduziert die Verarbeitungslast des Hauptmikrocontrollers.Dadurch werden Leistung, Genauigkeit und Systemeffizienz verbessert.Der MPU9250 unterstützt I²C- und SPI-Kommunikation, programmierbare Vollbereichsbereiche und eine 16-Bit-ADC-Auflösung.
Wenn Sie am Kauf des MPU9250 interessiert sind, kontaktieren Sie uns bitte bezüglich Preis und Verfügbarkeit.
MPU9250 Sensor CAD-Modelle
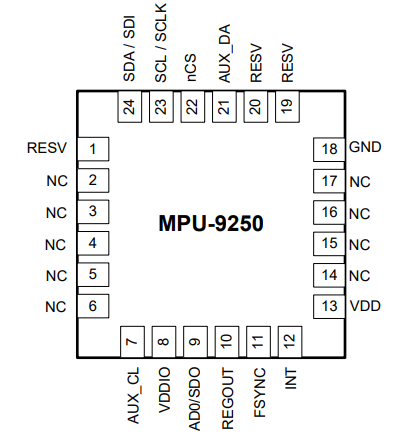
Details zur Pinbelegung des MPU9250-Sensors
|
Pin
Nein. |
Pin
Name |
Beschreibung |
|
1 |
RESV |
Reserviert (nicht
verbinden) |
|
2 |
NC |
Keine Verbindung |
|
3 |
NC |
Keine Verbindung |
|
4 |
NC |
Keine Verbindung |
|
5 |
NC |
Keine Verbindung |
|
6 |
NC |
Keine Verbindung |
|
7 |
AUX_CL |
Hilfs-I²C
Uhr |
|
8 |
VDDIO |
Digitale I/O
Versorgungsspannung |
|
9 |
AD0/SDO |
I²C-Adresse
Wählen Sie / SPI-Datenausgang |
|
10 |
REGOUT |
Reglerausgang |
|
11 |
FSYNC |
Rahmen
Synchronisationseingang |
|
12 |
INT |
Ausgabe unterbrechen |
|
13 |
VDD |
Stromversorgung
Spannung |
|
14 |
NC |
Keine Verbindung |
|
15 |
NC |
Keine Verbindung |
|
16 |
NC |
Keine Verbindung |
|
17 |
NC |
Keine Verbindung |
|
18 |
GND |
Boden |
|
19 |
RESV |
Reserviert (nicht
verbinden) |
|
20 |
RESV |
Reserviert (nicht
verbinden) |
|
21 |
AUX_DA |
Hilfs-I²C
Daten |
|
22 |
nCS |
SPI-Chipauswahl
(Aktiv niedrig) |
|
23 |
SCL/SCLK |
I²C-Takt / SPI
Uhr |
|
24 |
SDA/SDI |
I²C-Daten / SPI
Dateneingang |
Alternativen und gleichwertiges Modell
• MPU-6500
• MPU-9150
• MPU-6050
• BNO055
• BNO080
• BNO085
• LSM9DS1
Funktionsblockdiagramm des MPU9250-Sensors
Das Funktionsblockdiagramm des MPU9250 zeigt, wie der 9-Achsen-Bewegungssensor Bewegungs- und Orientierungsdaten intern verarbeitet.Auf der linken Seite enthalten der 3-Achsen-Beschleunigungsmesser und das 3-Achsen-Gyroskop jeweils Selbsttestschaltungen und einzelne ADCs.Diese ADCs wandeln die analogen Bewegungssignale in digitale Daten um.Ein eingebauter Temperatursensor ist ebenfalls enthalten, um Abweichungen zu kompensieren und die Genauigkeit zu verbessern.Alle Signale durchlaufen eine interne Signalaufbereitung, bevor sie an den digitalen Verarbeitungsbereich gesendet werden.
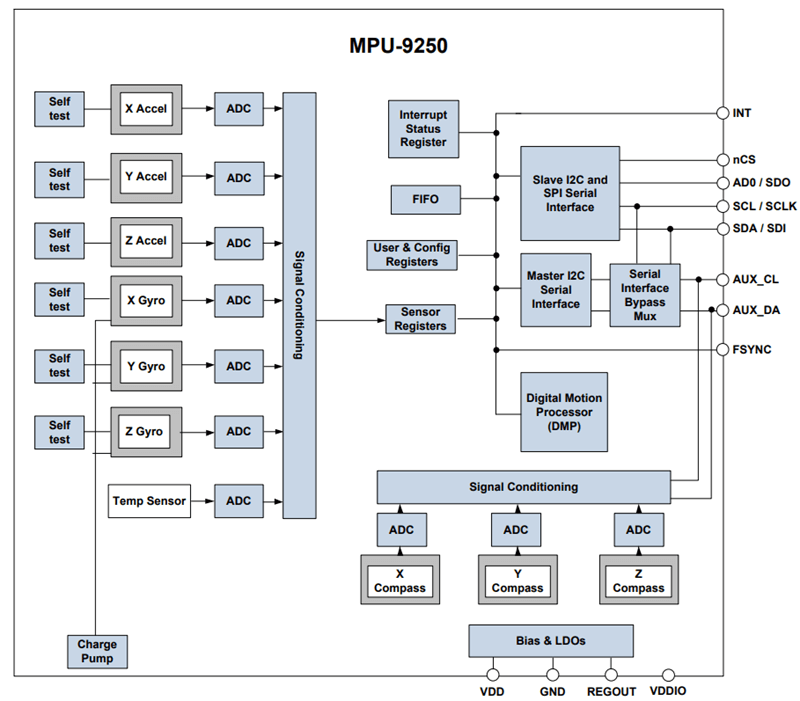
Unten rechts verfügt das 3-Achsen-Magnetometer (Kompass) über eigene ADCs und eine Signalkonditionierungsstufe.Der Bias- und LDO-Block sorgt für stabile interne Spannungen von VDD und VDDIO, während REGOUT den internen Regler unterstützt.Im Zentrum verwalten der Digital Motion Processor (DMP), FIFO und Konfigurationsregister die Datenverarbeitung, Kalibrierung und Speicherung.Auf der rechten Seite ermöglichen die I²C- und SPI-Schnittstellen die Kommunikation mit einem Mikrocontroller, während die zusätzliche I²C-Schnittstelle externe Sensoren anschließt.
Technische Daten des MPU9250-Sensors
|
Spezifikationen
|
Bedingungen |
Min
– Max (Einheiten) |
|
Versorgungsspannung
(VDD) |
Betrieb |
2,4 – 3,6 V |
|
I/O-Versorgung
Spannung (VDDIO) |
Digital
Schnittstelle |
1,71 V – VDD |
|
Versorgungsspannung
(VDD) |
Absolutes Maximum |
-0,5 – 4,0 V |
|
E/A-Spannung
(VDDIO) |
Absolutes Maximum |
-0,5 – 4,0 V |
|
Beschleunigungsmesser
Reichweite |
Programmierbar |
±2g – ±16g |
|
Gyroskop-Reichweite |
Programmierbar |
±250 – ±2000 °/s |
|
Magnetometer
Reichweite |
AK8963 |
±4800 µT |
|
Betrieb
Temperatur |
— |
-40 – +85 °C
|
|
Lagerung
Temperatur |
— |
-40 – +125 °C |
|
Schocktoleranz |
0,2 ms,
stromlos |
Bis zu 10.000 g |
|
I²C-Geschwindigkeit |
Schnellmodus |
Bis zu 400 kHz |
|
SPI-Geschwindigkeit |
Standard / Hoch
Geschwindigkeit |
1 – 20 MHz |
|
ADC-Auflösung |
Kreisel / Beschleunigung /
Mag |
16-Bit |
|
Paketgröße |
QFN |
3 × 3 × 1 mm |
Funktionen des MPU9250-Sensors
Gyroskopfunktionen
• 3-Achsen-Digitalgyroskop – Misst die X-, Y- und Z-Winkelgeschwindigkeit.
• Programmierbarer Gesamtbereich (±250 bis ±2000°/s) – Einstellbare Empfindlichkeit für verschiedene Bewegungsniveaus.
• 16-Bit-ADC-Auflösung – Bietet präzise digitale Ausgabe.
• Digitaler Tiefpassfilter – Reduziert Rauschen in Bewegungsdaten.
• 3,2 mA Betriebsstrom – Effizienter Stromverbrauch.
• 8 µA Schlafmodus – Extrem niedriger Standby-Stromverbrauch.
• Werkskalibrierung und Selbsttest – Gewährleistet Genauigkeit und Zuverlässigkeit.
Beschleunigungsmesserfunktionen
• 3-Achsen-Digitalbeschleunigungsmesser – Misst die lineare Beschleunigung.
• Programmierbarer Bereich (±2 g bis ±16 g) – Geeignet für niedrige und hohe Beschleunigungen.
• 16-Bit-ADC-Auflösung – Hohe Messgenauigkeit.
• Energiesparmodi – 8,4 µA bis 450 µA je nach Modus.
• Wake-on-Motion-Interrupt – Spart Strom in tragbaren Geräten.
• Selbsttestfunktion – Überprüft den Sensorbetrieb.
Magnetometerfunktionen
• 3-Achsen-Hall-Effekt-Magnetsensor – Erkennt die Richtung des Magnetfelds.
• 14-Bit-Auflösung (0,6 µT/LSB) – Genaue Kompassmesswerte.
• ±4800 µT Gesamtbereich – Großer magnetischer Erkennungsbereich.
• Niedriger Betriebsstrom (280 µA bei 8 Hz) – Effiziente Leistung.
• Integrierter Selbsttest – Bestätigt die ordnungsgemäße Magneterkennung.
Zusätzliche Funktionen
• Zusätzliche I²C-Master-Schnittstelle – Anschluss externer Sensoren.
• 512-Byte-FIFO-Puffer – Ermöglicht das Lesen von Burst-Daten.
• Digitaler Temperatursensor – Unterstützt thermische Kompensation.
• Programmierbare digitale Filter – Verbessert die Signalqualität.
• I²C (400 kHz) und SPI (bis zu 20 MHz) – Flexible Kommunikationsoptionen.
• Breite Versorgungsspannung (2,4 V–3,6 V) – Geeignet für tragbare Systeme.
• Kompaktes 3×3×1 mm QFN-Gehäuse – Ideal für kleine Geräte.
• 10.000 g Stoßtoleranz – Hohe Haltbarkeit.
• RoHS-konform – Umweltfreundlich.
Bewegungsverarbeitung
• Eingebauter Digital Motion Processor™ (DMP™) – Führt die Sensorfusion intern durch.
• Unterstützung der Gestenerkennung – Ermöglicht bewegungsbasierte Steuerung.
• Schrittzähler mit geringem Stromverbrauch – Verfolgt Schritte, während die Host-MCU schläft.
MPU9250 Typischer Betriebsschaltkreis

Die typische Betriebsschaltung des MPU9250 zeigt die empfohlenen externen Verbindungen für die I²C- und SPI-Kommunikationsmodi.Das Gerät benötigt zwei Stromversorgungen: VDD (2,4–3,6 V) für den internen Kern und VDDIO (1,8–3,3 V) für die digitale Schnittstelle.Entkopplungskondensatoren (typischerweise 0,1 µF) werden in der Nähe der VDD- und REGOUT-Pins platziert, um die Versorgung zu stabilisieren und Rauschen zu reduzieren.Ein kleiner Kondensator am REGOUT unterstützt den internen Spannungsregler.
In der I²C-Konfiguration sind die SCL- und SDA-Pins mit dem I²C-Bus des Mikrocontrollers verbunden, während der AD0-Pin die Geräteadresse auswählt.In der SPI-Konfiguration werden nCS, SCLK, SDI und SDO für die serielle Kommunikation verwendet.Der INT-Pin liefert Interrupt-Signale an den Host-Prozessor.
Unbenutzte Pins wie NC und reservierte Pins bleiben unbeschaltet.Dieser Schaltkreis gewährleistet eine stabile Stromversorgung, zuverlässige Kommunikation und einen ordnungsgemäßen Sensorbetrieb.
MPU9250-Sensorkonfiguration
MPU-9250-Lösung mit I²C-Schnittstelle
In der I²C-Konfiguration kommuniziert der Systemprozessor mit der MPU-9250 über die Leitungen SCL (Takt) und SDA (Daten).Der AD0-Pin wählt die Geräteadresse (VDD oder GND) und ermöglicht so mehrere Geräte am selben I²C-Bus.Der INT-Pin sendet Interrupt-Signale, um den Prozessor zu benachrichtigen, wenn neue Sensordaten bereitstehen.
Im Inneren der MPU-9250 durchlaufen Bewegungsdaten vom Beschleunigungsmesser, Gyroskop und Magnetometer Sensorregister, FIFO und den Digital Motion Processor (DMP), bevor sie an den Host gesendet werden.Die integrierte I²C-Master-Schnittstelle ermöglicht es dem MPU-9250, Daten von externen Sensoren über die Pins AUX_CL und AUX_DA zu lesen.Der Schnittstellen-Bypass-Multiplexer kann bei Bedarf einen externen Sensor (z. B. einen Kompass) direkt an den Hauptprozessor anschließen.

MPU-9250-Lösung mit SPI-Schnittstelle
In der SPI-Konfiguration erfolgt die Kommunikation über nCS-, SCLK-, SDI- und SDO-Pins, was eine schnellere Datenübertragung im Vergleich zu I²C ermöglicht.Der INT-Pin stellt weiterhin Datenbereit- oder Ereignis-Interrupts für den Systemprozessor bereit.
Die interne Struktur bleibt ähnlich: Sensordaten fließen vor der Übertragung durch Konfigurationsregister, FIFO und DMP.Der zusätzliche I²C-Bus steht weiterhin für den Anschluss externer Sensoren zur Verfügung, während der interne I²C-Master Lese-/Schreibvorgänge verwaltet.Dieser Aufbau ermöglicht eine schnellere Kommunikation bei gleichzeitiger Beibehaltung der flexiblen Sensorerweiterung.
Überlegungen zur seriellen Schnittstelle MPU9250

Das Diagramm zeigt, wie der MPU-9250 über I²C-Kommunikation eine Verbindung zu einem Systemprozessor und einem optionalen Sensor eines Drittanbieters herstellt.Das Gerät verfügt über zwei Versorgungsdomänen: VDD versorgt den internen Kern mit Strom, während VDDIO die digitalen I/O-Logikpegel definiert.Alle Kommunikationspins wie SDA, SCL, INT, AD0 und AUX_DA/AUX_CL arbeiten zwischen 0 V und VDDIO, was bedeutet, dass die Logikspannung mit der E/A-Spannung des Systemprozessors übereinstimmen muss.
Der primäre I²C-Bus (SDA und SCL) ist über an VDDIO angeschlossene Pull-up-Widerstände direkt mit dem Systemprozessor verbunden.Dadurch wird sichergestellt, dass auf dem Bus ordnungsgemäße Logik-High-Pegel vorliegen.Der AD0-Pin wählt die Geräteadresse aus, indem er entweder mit GND oder VDDIO verbunden wird.
Der zusätzliche I²C-Bus (AUX_DA und AUX_CL) ermöglicht der MPU-9250 die Verbindung mit einem Sensor eines Drittanbieters.Dieser externe Sensor arbeitet auch mit VDDIO-Logikpegeln.Diese Konfiguration gewährleistet Spannungskompatibilität, stabile Kommunikation und sichere Integration zusätzlicher Sensoren.
MPU9250 Ausrichtung der Achsen

Der MPU9250 verwendet ein festes rechtshändiges Koordinatensystem, um Bewegung und Drehung entlang der X-, Y- und Z-Achse zu definieren.Das Diagramm zeigt die Richtung der positiven Beschleunigung und der positiven Winkeldrehung für jede Achse.Wenn der Chip flach platziert wird und die obere Markierung sichtbar ist, liegen die +X- und +Y-Achsen entlang der Oberfläche des Gehäuses, während die +Z-Achse senkrecht zur oberen Oberfläche zeigt.
Die Pfeile geben die Richtung der positiven Beschleunigung für den Beschleunigungsmesser und die Richtung der positiven Rotation für das Gyroskop an.Die Drehung im oder gegen den Uhrzeigersinn erfolgt nach der Rechts-Hand-Regel.Der kleine Punkt auf der Verpackung markiert Pin 1 und hilft dabei, die richtige Ausrichtung bei der Leiterplattenmontage zu erkennen.
Bei der Montage des MPU9250 auf einer Leiterplatte ist es wichtig, die Achsenausrichtung zu verstehen, da die Sensorwerte davon abhängen, wie der Chip physisch im System ausgerichtet ist.
MPU9250-Sensoranwendungen
• Drohnen/UAV-Flugsteuerung
• Selbstbalancierende Roboter
• Gestenerkennungsgeräte
• VR/AR-Kopfverfolgung
• Tragbare Fitness-Tracker
• Smartphones und Tablets
• Gaming-Controller
• Elektronische Kompasssysteme
• Trägheitsnavigationssysteme (INS)
• Kamerastabilisierung (Gimbals)
• Industrielle Bewegungsüberwachung
• Schrittzähler / Schrittzähler
• Intelligente Fernbedienungen
• Autonome Fahrzeuge
MPU9250 Sensor Anderer digitaler Bewegungsprozessor
|
Funktion |
MPU9250 |
ICM-20948 |
BNO055 |
LSM9DS1 |
|
Hersteller |
TDK InvenSense |
TDK InvenSense |
Bosch |
STMicroelectronics |
|
Sensortyp |
9-Achsen (Beschleunigung +
Gyro + Mag) |
9-Achsen |
9-Achsen |
9-Achsen |
|
Integriertes DMP |
Ja |
Ja |
Ja (Fusion
Motor) |
Nein |
|
Beschleunigungsmesser
Reichweite |
±2g bis ±16g |
±2g bis ±16g |
±2g bis ±16g |
±2g bis ±16g |
|
Gyroskop-Reichweite |
±250 bis ±2000°/s |
±250 bis ±2000°/s |
±125 bis ±2000°/s |
±245 bis ±2000°/s |
|
Magnetometer |
Integriert
(AK8963) |
Integriert |
Integriert |
Integriert |
|
Schnittstelle |
I²C, SPI |
I²C, SPI |
I²C |
I²C, SPI |
|
Betrieb
Spannung |
2,4V – 3,6V |
1,71 V – 3,6 V |
2,4V – 3,6V |
1,9 V – 3,6 V |
|
Maximale SPI-Geschwindigkeit |
20 MHz |
7 MHz |
— |
10 MHz |
|
Paketgröße |
3×3 mm QFN |
3×3 mm QFN
|
3,8×5,2 mm |
3×3 mm |
|
Status |
Veraltet |
Aktiv |
Aktiv |
Aktiv |
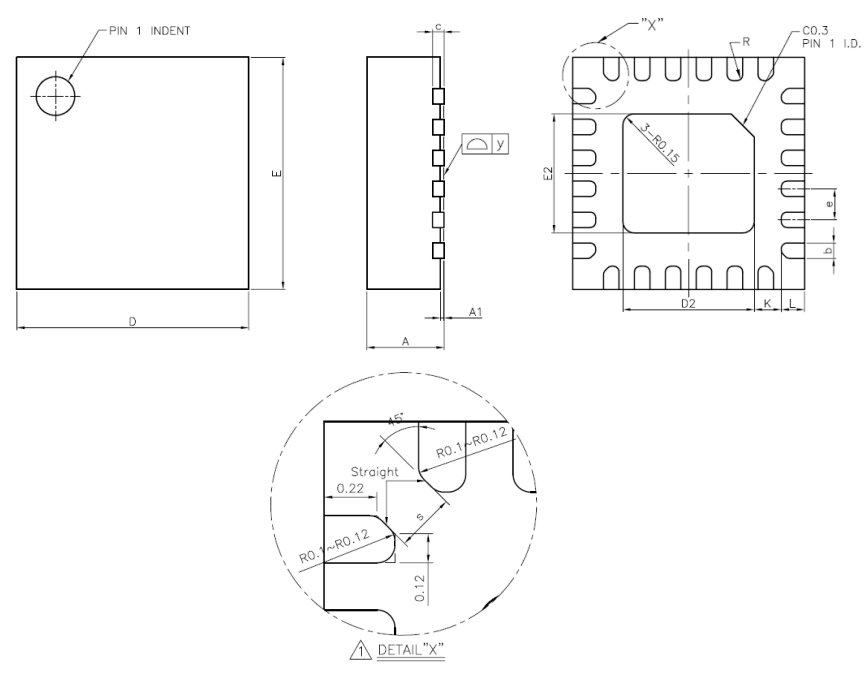
Mechanische Abmessungen des MPU9250-Sensors
|
Symbol |
Beschreibung |
Min
(mm) |
Nom
(mm) |
Max
(mm) |
|
A |
Paket
Dicke |
0,95 |
1,00 |
1.05 |
|
A1 |
Führungsfinger
(Pad) Sitzhöhe |
0,00 |
0,02 |
0,05 |
|
b |
Führungsfinger
(Pad-)Breite |
0,15 |
0,20 |
0,25 |
|
c |
Leadframe (Pad)
Höhe |
— |
0,15 REF |
— |
|
D |
Paketbreite |
2,90 |
3,00 |
3.10 |
|
D2 |
Freiliegendes Pad
Breite |
1,65 |
1,70 |
1,75 |
|
E |
Paketlänge |
2,90 |
3,00 |
3.10 |
|
E2 |
Freiliegendes Pad
Länge |
1,49 |
1,54 |
1,59 |
|
e |
Führungsfinger
(Pad-Pad) Tonhöhe |
— |
0,40 |
— |
|
f (e-b) |
Blei-Führer
(Pad-Pad) Raum |
0,15 |
0,20 |
0,25 |
|
K |
Führen (Pad) zu
Freiliegender Pad-Bereich |
— |
0,35 REF |
— |
|
L |
Blei (Pad)
Länge |
0,25 |
0,30 |
0,35 |
|
R |
Blei (Pad)
Eckradius |
0,075 |
REF |
— |
|
s |
Eckball in Führung
Außenradius zum Eckführungsaußenradius |
— |
0,25 REF |
— |
|
j |
Koplanarität |
0,00 |
— |
0,075 |
Hersteller
Der MPU9250-Sensor wird von TDK InvenSense hergestellt, einem führenden Unternehmen in der MEMS-Bewegungserkennungstechnologie.TDK InvenSense nutzt fortschrittliche CMOS-MEMS-Wafer-Level-Fertigungs- und Wafer-Bonding-Prozesse, um Beschleunigungsmesser, Gyroskop, Magnetometer und Digital Motion Processor (DMP) in ein kompaktes 3×3 mm QFN-Gehäuse zu integrieren.Das Unternehmen verfügt über Produktionskapazitäten für hohe Stückzahlen, automatisierte Kalibrierungssysteme und eine strenge Qualitätskontrolle, um eine gleichbleibende Leistung, einen geringen Stromverbrauch und eine hohe Zuverlässigkeit sicherzustellen.
Häufig gestellte Fragen [FAQ]
1. Wie kalibriere ich den MPU9250 für eine genaue Bewegungsverfolgung?
Die Kalibrierung umfasst eine Offset-Korrektur für das Gyroskop und den Beschleunigungsmesser sowie eine Hart-/Weicheisenkompensation für das Magnetometer.Dies kann mithilfe integrierter Selbsttestfunktionen und softwarebasierter Kalibrierungsalgorithmen während der Initialisierung erfolgen.
2. Benötigt die MPU9250 externe Pull-Up-Widerstände für die I²C-Kommunikation?
Ja.Die SDA- und SCL-Leitungen erfordern externe Pull-up-Widerstände, die an VDDIO angeschlossen sind, um ordnungsgemäße logische High-Pegel auf dem I²C-Bus sicherzustellen.
3. Kann der MPU9250 mit einem 5-V-Mikrocontroller arbeiten?
Nicht direkt.Der MPU9250 arbeitet mit 2,4–3,6 V (VDD) und 1,71 V–VDD (VDDIO).Für eine sichere 5-V-Schnittstelle ist ein Pegelumsetzer erforderlich.
4. Wie wähle ich zwischen I²C und SPI für MPU9250?
I²C benötigt weniger Pins und ist einfacher, während SPI eine schnellere Datenübertragung und bessere Leistung für Hochgeschwindigkeitsanwendungen bietet.
5. Was ist der Unterschied zwischen MPU9250 und MPU6050?
Die MPU9250 verfügt über ein 3-Achsen-Magnetometer (insgesamt 9 Achsen), während die MPU6050 nur über einen 6-Achsen-Beschleunigungsmesser und ein Gyroskop verfügt.
6. Warum liefert mein MPU9250 instabile oder schwankende Messwerte?
Häufige Ursachen sind falsche Kalibrierung, elektrisches Rauschen, schlechtes PCB-Layout, instabile Stromversorgung oder falsche Achsenausrichtung.
7. Kann der MPU9250 für Lage- und Kursreferenzsysteme (AHRS) verwendet werden?
Ja.Mit geeigneten Sensorfusionsalgorithmen oder dem integrierten DMP können Roll-, Nick- und Gierausrichtungsdaten bereitgestellt werden.
8. Wie viel Rechenleistung spart der MPU9250 DMP?
Der DMP übernimmt die Sensorfusion und Filterung intern, wodurch die MCU-Belastung erheblich reduziert und die Gesamtsystemeffizienz verbessert wird.
9. Welche Abtastraten werden vom MPU9250 unterstützt?
Der Sensor unterstützt je nach Konfiguration konfigurierbare Abtastraten von bis zu 1 kHz für Gyro- und Beschleunigungsmesserdaten.
Verwandter Artikel
-
![Datenblatt-Leitfaden zum 3,3-V-LDO-Spannungsregler HT7333]() Mar 03 2026Datenblatt-Leitfaden zum 3,3-V-LDO-Spannungsregler HT7333
Mar 03 2026Datenblatt-Leitfaden zum 3,3-V-LDO-Spannungsregler HT7333In diesem Artikel werden der HT7333-Überblick, die Pin-Konfiguration, das Funktionsblockdiagramm, Spezifikationen, Funktionen, Anwendungsschaltung, A... -
![Vollständige Anleitung zum LT1085 3A Low Dropout-Regler]() Mar 03 2026Vollständige Anleitung zum LT1085 3A Low Dropout-Regler
Mar 03 2026Vollständige Anleitung zum LT1085 3A Low Dropout-ReglerDer LDO-Regler LT1085 ist für Anwendungen konzipiert, die einen hohen Strom und eine niedrige Spannungsdifferenz zwischen Eingang und Ausgang erforde...


Verwandte -Produkte

C3216X8R2A473K085AA
CAP CER 0.047UF 100V X8R 1206

CC1206JRNPOABN152
CAP CER 1500PF 200V C0G/NPO 1206

DAC8571IDGK
IC DAC 16BIT V-OUT 8VSSOP

TLC082QDGNRQ1
IC OPAMP GP 2 CIRCUIT 8HVSSOP

HCPL-091J-500E
DGTL ISO 2500VRMS 4CH GP 16SOIC

AT89C51ED2-RLTUM
IC MCU 8BIT 64KB FLASH 44VQFP

HMC588LC4B
IC OSC VCO WIDEBAND 24SMD

MIC2182BSM
IC REG CTRLR BUCK 16SSOP

BT254KPJ20
BT254KPJ20 BT
TPA122DGNRG4
IC AMP AUDIO PWR .07W STER 8MSOP

ZNBG3114Q20
ZNBG3114Q20 ZETEX

HMC287MS8TR
HMC287MS8TR HITTITE
T6VU6XBG-0002W1
DLP BGA