Alle Kategorien
-
Integrierte schaltkreise (ICS)
Integrierte schaltkreise (ICS)
- Schnittstelle - Sensor, kapazitive Berührung(642)
- Spezialisierte ICS(12302)
- PMIC-Spannungsregler-besonderer Zweck(5644)
- PMIC-Spannungsregler-lineare Regler(793)
- PMIC-Spannungsregler-linear + Switching(1829)
- PMIC-Spannungsregler-linear(70981)
- PMIC-Spannungsregler-DC DC Switching Regulators(39569)
- PMIC-Regler-DC-DC-Switching-Controller(13507)
- PMIC-Spannungs-Referenz(9453)
- PMIC-v/f und f/v-Wandler(145)
- PMIC-Thermal Management(592)
- PMIC-Supervisor(47946)
- PMIC-RMS bis DC-Wandler(170)
- PMIC-Netzteil-Controller, Monitore(2104)
- PMIC-Power over Ethernet (PoE) Controller(1008)
- PMIC-Power Management-spezialisierte(7722)
- PMIC-Netzschalter, Treiber laden(7706)
- PMIC-PFC (Power Factor Correction)(1222)
- PMIC oder Steuerungen, ideale Dioden(705)
- PMIC-Motor-Treiber, Regler(4712)
- PMIC-Beleuchtung, Ballast-Regler(560)
- PMIC-LED-Treiber(7282)
- PMIC-Laser-Treiber(573)
- PMIC-Hot-Swap-Controller(2816)
- PMIC-Gate-Treiber(7083)
- PMIC-voll, Half-Bridge-Treiber(1342)
- PMIC-Energy Messung(654)
- PMIC-Display-Treiber(1435)
- PMIC-derzeitige Regulierung/Management(1481)
- PMIC-Batterie-Management(5553)
- PMIC-Ladegeräte(3831)
- PMIC-AC DC Konverter, Offline Schalter(4905)
- Memory-Controller(358)
- Memory-Konfigurations-Proms für FPGAs(639)
- Speicher-Akkus(13)
- Erinnerung(65694)
- Logic-universelle Bus-Funktionen(706)
- Logic-Übersetzer, Level-Shifter(2854)
- Logik-Specialty Logic(1870)
- Logik-Signal-Schalter, Multiplexer, Decoder(9420)
- Logic-Shift-Register(2665)
- Logic-Parity Generatoren und Checkers(335)
- Logic-multivibratoren(831)
- Logik-Latches(3658)
- Logik - Tore und Wechselrichter - Multifunktion, konfigurierbar(1687)
- Logik-Tore und Wechselrichter(16453)
- Logic-Flip Flops(7780)
- Logik-FIFOs Speicher(4240)
- Logik-Zähler, Trennlinien(3456)
- Logik-Vergleichsoperator(592)
- Logik-Puffer, Treiber, Receiver, Transceiver(17835)
- Linear-Video-Verarbeitung(2909)
- Linear-Vergleichsoperator(5084)
- Linear-analoge Multiplikatoren, Trennwände(263)
- Linear-Verstärker-Video Amps und Module(1905)
- Linear-Verstärker-Spezial-Zweck(1856)
- Linear - Verstärker - Instrumentierung, OP -Verstärker, Pufferverstärker(34236)
- Linear-Verstärker-Audio(4567)
- Interface-Voice Record und Playback(556)
- Schnittstelle - UARTs (Universal Asynchronous Receivers -Sender)(1237)
- Schnittstelle-Telecom(4467)
- Interface-spezialisierte(4833)
- Interface-Signal Terminatoren(333)
- Interface-Signal-Puffer, Repeater, Splitter(1449)
- Interface-Serializer, Deserializer(1480)
- Schnittstellen-Sensor und Detektor-Interfaces(1524)
- Interface-Module(169)
- Interface-Modems-ICS und Module(407)
- Interface-e/a-Expander(1136)
- Interface-Filter-aktiv(1226)
- Interface-Encoder, Decoder, Konverter(714)
- Interface-Treiber, Receiver, Transceiver(20755)
- Interface-Direct Digital Synthesis (DDS)(117)
- Interface-Controller(3628)
- Interface-Codecs(1676)
- Schnittstelle - Analoge Switches, Multiplexer, Demultiplexer(12567)
- Schnittstelle-analoge Schalter-spezieller Zweck(2533)
- Embedded-System on Chip (SoC)(4496)
- Embedded-PLDs (programmierbare Logik-Vorrichtung)(971)
- Embedded-Mikroprozessoren(10083)
- Embedded-Mikrocontroller-anwendungsspezifische(2275)
- Embedded-Mikrocontroller(99285)
- Eingebettet - Mikrocontroller, Mikroprozessor, FPGA -Module(1527)
- Eingebettet - FPGAs (Feldprogrammiergate -Array) mit Mikrocontrollern(81)
- Embedded-FPGAs (Field Programmable Gate Array)(27747)
- Embedded-DSP (Digital Signal Processors)(4081)
- Eingebettet - CPLDs (komplexe programmierbare Logikgeräte)(5187)
- Datenerfassung-Touch Screen Controller(1210)
- Datenerfassung-Digital to Analog Converter (DAC)(14419)
- Datenerfassung-digitale Potentiometer(6250)
- Datenerfassung-analog zu Digital Converters (ADC)(17776)
- Datenerfassung-analoges Frontend (AFE)(787)
- Datenerfassung-MDE/DACs-spezieller Zweck(3043)
- Clock/Timing-Uhren in Echtzeit(2446)
- Uhr/Timing - programmierbare Timer und Oszillatoren(23469)
- Clock/Timing-IC-Akkus(4)
- Takt/Timing-Delay Lines(1049)
- Uhr/Timing - Uhrengeneratoren, PLLS, Frequenzsynthesizer(32775)
- Clock/Timing-Clock Puffer, Treiber(4568)
- Clock/Timing-anwendungsspezifische(8652)
- Audio Spezial-Zweck(1564)
Relevanter Hersteller







-
Diskrete Halbleiter-Produkte
Diskrete Halbleiter-Produkte
- Aktuelle Regulierung - Dioden, Transistoren(1090)
- Transistoren-besonderer Zweck(226)
- Transistoren-programmierbare Unijunction(48)
- Transistoren-jfets(1558)
- Transistoren-IGBTs-Einzel(4799)
- Transistoren-IGBTs-Module(63420)
- Transistoren-IGBTs-Arrays(26)
- Transistoren-FETs, MOSFETs-Einzel(48330)
- Transistoren-FETs, MOSFETs-RF(4903)
- Transistoren-FETs, MOSFETs-Arrays(6641)
- Transistoren-Bipolar (BJT)-einzeln, Pre-biased(4539)
- Transistoren-Bipolar (BJT)-Einzel(25800)
- Transistoren-Bipolar (BJT)-RF(2087)
- Transistoren-bipolare (BJT)-Arrays, Pre-biased(2115)
- Transistoren-bipolare (BJT)-Arrays(2310)
- Thyristor-triacs(4044)
- Thyristoren-SCRs-Module(3967)
- Thyristoren-SCRs(5436)
- Thyristoren-diacs, sidacs(319)
- Power Driver Module(1627)
- Dioden-zenerdioden-Einzel(87483)
- Dioden-zenerdioden-Arrays(2619)
- Dioden - variable Kapazität (Varik, Varaktoren)(1200)
- Dioden-RF(2753)
- Dioden-Gleichrichter-Einzel(67528)
- Dioden-Gleichrichter-Arrays(20581)
- Dioden-Brücke-Gleichrichter(11700)
Relevanter Hersteller




-
RF/if und RFID
RF/if und RFID
- SIM -Karten für Abonnenten -Identifikationsmodul (SIM)(77)
- RF -Zirkulatoren und Isolatoren(1742)
- RFID, RF-Zugang, Monitoring-ICS(1550)
- RFID Transponder, Tags(747)
- RFID Lesegeräte(464)
- RFID -Bewertungs- und Entwicklungskits, Boards(30)
- RFID Antennen(329)
- RFI und EMI - Abschirm- und Absorbungsmaterialien(6444)
- HF und EMI-Kontakte, Fingerstock und Dichtungen(7497)
- RF Transmitter(668)
- RF Transceiver Module(6900)
- RF-Transceiver ICS(4169)
- HF-Schalter(9276)
- RF Shields(16401)
- HF-Receiver(1998)
- HF -Empfänger, Sender und Transceiver -Einheiten(2763)
- RF Power Divider/Splitter(1223)
- RF Power Controller ICs(86)
- HF-Modulatoren(710)
- HF-Mixer(2800)
- RF misc ICS und Module(3276)
- HF-Front-End (LNA + PA)(419)
- RF -Bewertungs- und Entwicklungskits, Boards(747)
- HF-gerichtete Kupplung(2718)
- RF Diplexer(1464)
- RF-Detektoren(412)
- RF-Demodulatoren(249)
- HF-Antennen(12319)
- HF-Verstärker(19651)
- Balun(1496)
- Dämpfungsglieder(4852)
Relevanter Hersteller







-
Optoelektronik
Optoelektronik
- Optomechanisch(480)
- Leuchten(125)
- Laserdioden, Lasermodule - Laserlieferung, Laserfasern(345)
- Hene Lasersysteme(31)
- Hene Laserköpfe(27)
- Hintergrundbeleuchtung anzeigen(93)
- Xenon-Beleuchtung(387)
- Touchscreen-Overlays(453)
- Panel Indicators, Pilot Lights(75729)
- Optik-Remote-Phosphor-Lichtquelle(269)
- Optik-Reflektoren(665)
- Optik-leichte Rohre(5384)
- Optik-Objektive(4951)
- LEDs-Spacer, Unentschieden(2718)
- LEDs-Lamp-Ersetzungen(29718)
- LEDs - Leiterplattenindikatoren, Arrays, Lichtstäbe, Balkendiagramme(9083)
- LED-thermische Produkte(667)
- LED-Beleuchtung(64)
- LED-Beleuchtung-weiß(37580)
- LED-Beleuchtung-Farbe(4728)
- LED-Beleuchtung-Maiskolben, Motoren, Module(28735)
- LED-Anzeige-diskret(27601)
- Laserdioden, Module(1553)
- Lampen-Glühlampen, Neons(311004)
- Lampen-Kälte-Fluoreszenz (KKL) & UV(164)
- Wechselrichter(7728)
- Infrarot, UV, sichtbare Strahler(3871)
- Fiber Optics-Transmitter-Antrieb integriert(4085)
- Fiber Optics-Transmitter-diskrete(350)
- Fiber Optics-Transceiver Module(18758)
- Fiberoptik-Switches, Multiplexer, Demultiplexer(1387)
- Fiberoptik-Receiver(695)
- Fiberoptik-Dämpfung(654)
- Elektrolumineszenz(102)
- Display, Monitor-Interface Controller(98)
- Display-Module-Vakuum-Leuchtstofflampen (VFD)(249)
- Module anzeigen-LED Dot Matrix und Cluster(865)
- Display-Module-LED-Zeichen und numerische(5421)
- Display-Module-LCD, OLED, Graphic(4654)
- Display-Module-LCD, OLED-Zeichen und numerische(2202)
- Display-Blenden, Objektive(88)
- Adresse, Spezialität(458)
Relevanter Hersteller







-
Sensoren, Wandler
Sensoren, Wandler
- Ultraschallempfänger, Sender - Industrial(115)
- Temperatursensoren - Thermostate - Mechanisch - Industrielles(3103)
- Temperatursensoren - Analog und digitaler Ausgang - Industrial(209)
- Näherungssensoren - Industrial(13611)
- Drucksensoren, Wandler - Industrie(26503)
- Optische Sensoren - Photonik - Zähler, Detektoren, SPCM (Einzelphotonzählmodul)(751)
- Optische Sensoren - Kameramodule(875)
- Magnetsensoren - Position, Nähe, Geschwindigkeit (Module) - Industrie(554)
- Kraftsensoren - Industrial(346)
- Flusssensoren - Industrielles(151)
- Float, Level Sensoren - Industrial(310)
- Encoder - Industrial(4980)
- Farbsensoren - Industrial(50)
- Berührungssensoren(100)
- Ultraschall-Receiver, Transmitter(2421)
- Temperatursensoren-Thermostat-Solid State(1096)
- Temperatursensoren-Thermostate-mechanisch(3397)
- Temperatursensoren - Thermoelemente, Temperatursonden(1921)
- Temperatursensoren - RTD (Widerstandstemperaturdetektor)(1525)
- Temperatursensoren-PTC-Thermistoren(2273)
- Temperatursensoren-ntc-thermistoren(13259)
- Temperatursensoren-Analog und Digital Output(3928)
- DMS(1399)
- Spezialisierte Sensoren(1861)
- Solarzellen(503)
- Schock-Sensoren(84)
- Sensor-Interface-Junction-Blöcke(2519)
- Sensor-Kabel-Baugruppen(22011)
- Proximity/Belegung Sensoren-fertige Einheiten(725)
- Näherungsschalter(2860)
- Drucksensoren, Wandler(11317)
- Positionssensoren - Winkel, lineare Positionsmessung(6022)
- Optische Sensoren-reflektierende-Logik-Ausgang(194)
- Optische Sensoren - reflektierend - analoge Ausgang(432)
- Optische Sensoren-Phototransistoren(1027)
- Optische Sensoren - Photointerrupter - Schlitztyp - Transistorausgang(1427)
- Optische Sensoren - Photointerrupter - Schlitztyp - Logikausgabe(1215)
- Optische Sensoren-Lichtschranke, Industrial(16763)
- Optische Sensoren-Photodioden(1543)
- Optische Sensoren-Foto-Detektoren-Remote Receiver(2605)
- Optische Sensoren-Foto-Detektoren-Logik-Ausgang(146)
- Optische Sensoren-Foto-Detektoren-CDs-Zellen(74)
- Optische Sensoren-Distanz-Messung(377)
- Optische Sensoren-Ambient Light, IR, UV Sensoren(1305)
- Multifunktions(558)
- Motion Sensors-Vibration(337)
- Motion Sensors-Tilt Schalter(67)
- Bewegungsmelder-optisch(719)
- Motion Sensors-Neigungssensoren(175)
- Motion Sensors-Imus (Trägheit-Maßeinheiten)(416)
- Motion Sensors-Kreisel(214)
- Motion Sensors-Beschleunigungsmesser(1911)
- Magnete-Sensor abgestimmt(119)
- Magnete-Multi Purpose(1965)
- Magnetische Sensoren-Schalter (Solid State)(3700)
- Magnetsensoren - Position, Nähe, Geschwindigkeit (Module)(5199)
- Magnetische Sensoren-linear, Kompass (ICS)(1247)
- Magnetsensoren - Kompass, Magnetfeld (Module)(35)
- LVDT -Wandler (linearer variabler Differentialtransformator)(204)
- IrDA Transceiver-Module(196)
- Bildsensor, Kamera(2235)
- Feuchtigkeit-Sensoren(1425)
- Gas-Sensoren(1217)
- Force Sensoren(188)
- Durchfluss-Sensoren(550)
- Float, Level Sensoren(1343)
- Encoder(6357)
- Staub-Sensoren(43)
- Aktuelle Wandler(3455)
- Color Sensoren(85)
- Verstärker(1905)
Relevanter Hersteller







-
Anschlüsse, Verbindungen
Anschlüsse, Verbindungen
- USB, DVI, HDMI -Stecker(446)
- Festkörperbeleuchtungsstecker(555)
- Steckdosen für ICs, Transistoren(953)
- Steckbare Steckverbinder(1221)
- Photovoltaik (Solarpanel) Anschlüsse(136)
- Glasfaseranschlüsse(370)
- FFC, FPC (flache flexible) Anschlüsse(761)
- D-Sub, D-förmige Stecker(2887)
- Koaxialverbinder (RF)(2389)
- Rundanschlüsse(14162)
- Stromanbeter Blade Type(273)
- Stecker und Behälter(2597)
- USB, DVI, HDMI Stecker-Adapter(572)
- USB, DVI, HDMI -Stecker(4298)
- Klemmen-Wire to Board Steckverbinder(217)
- Klemmen-Draht-Steckverbinder(4322)
- Klemmen-Draht-Pin Stecker(328)
- Terminals-Revolver Steckverbinder(1273)
- Terminals-spezialisierte Steckverbinder(2042)
- Klemmen-Spaten Verbinder(3902)
- Klemmen-Löten/Stecker(345)
- Klemmen-Verschraubungen(745)
- Klemmen-Ring Steckverbinder(12596)
- Klemmen-rechteckige Steckverbinder(4747)
- Terminals - Schnellverbindungen, schnelle Trennungsanschlüsse(8514)
- Klemmen-PC PIN, Single Post Connectors(3776)
- Klemmen-PC-Pin-Buchsen, Sockel-Steckverbinder(5883)
- Klemmen-magnetische Draht-Steckverbinder(1653)
- Klemmen-Messer Steckverbinder(112)
- Klemmen-Gehäuse, Stiefel(2850)
- Klemmen-Folie Steckverbinder(108)
- Klemmen-Barrel, Bullet-Steckverbinder(1107)
- Klemmen-Adapter(137)
- Terminal-Streifen und Revolver-Boards(1159)
- Terminal Junction Systeme(2533)
- Anschlussblöcke-Draht an Bord(43615)
- Terminal Blocks-spezialisierte(3722)
- Terminal Blocks-Power Distribution(847)
- Anschlussblöcke-Panel Mount(1359)
- Terminal Blocks-Interface Module(1819)
- Anschlussblöcke-Kopfzeilen, Stecker und Buchsen(119920)
- Anschlussblöcke-DIN-Schiene, Kanal(9373)
- Anschlussblöcke-Kontakte(65)
- Anschlussblöcke-Barrier Blocks(47517)
- Anschlussblöcke-Adapter(1059)
- Solid State Lighting Verbinder-Kontakte(271)
- Festkörperbeleuchtungsstecker(1344)
- Buchsen für ICS, Transistoren-Adapter(275)
- Steckdosen für ICs, Transistoren(22148)
- Shunts, Jumper(907)
- Rechteckige Verbinder-Feder geladen(7721)
- Rechteckige Steckverbinder-Gehäuse(43023)
- Rechteckige Verbinder-Kopfzeilen, Spezial-PIN(6129)
- Rechteckige Anschlüsse - Header, Gefäße, weibliche Sockel(229601)
- Rechteckige Verbinder-Kopfzeilen, männliche Pins(543338)
- Rechteckige Anschlüsse - kostenloses Hängen, Panelhalterung(30142)
- Rechteckige Verbinder-Kontakte(10681)
- Rechteckige Anschlüsse - Board in, Direktdraht zum Board(2432)
- Rechteckige Verbinder-Adapter(475)
- Rechteckig - Brett zu Board -Steckern - Header, Behälter, weibliche Sockel(9)
- Rechteckig - Brett zu Board -Steckern - Header, männliche Stifte(2)
- Rechteckige Anschlüsse - Board -Abstandshalter, Stacker (Board zu Board)(238901)
- Rechteckige Anschlüsse - Arrays, Kantentyp, Mezzanin (Board zu Board)(37853)
- Stromanschluss-Eingänge, Steckdosen, Module(10310)
- Steckbare Steckverbinder(6049)
- Photovoltaik- (Solarpanel) Anschlüsse - Kontakte(77)
- Photovoltaik (Solarpanel) Anschlüsse(504)
- Modulare Steckverbinder-Verdrahtung Blöcke(99)
- Modulare Steckverbinder-Stecker(1674)
- Modulare Steckverbinder-Stecker Gehäuse(181)
- Modulare Steckverbinder-Buchsen mit magnetischen(10152)
- Modulare Steckverbinder-Buchsen(23416)
- Modulare Steckverbinder-Adapter(855)
- Memory Connectors-PC Cards-Adapter(21)
- Memory Connectors-PC Card Sockets(3299)
- Memory Connectors-Inline Modul Sockets(3390)
- LGH Steckverbinder(764)
- Keystone-Einsätze(2758)
- Keystone-Frontplatte, Frames(1926)
- Heavy Duty Steckverbinder-Einsätze, Module(4190)
- Schwerlastanschlüsse - Gehäuse, Kapuzen, Basen(17226)
- Heavy Duty Steckverbinder-Frames(523)
- Heavy Duty Steckverbinder-Kontakte(1832)
- Heavy Duty Steckverbinder-Baugruppen(671)
- LWL-Steckverbinder-Gehäuse(919)
- Glasfaser-Steckverbinder - Adapter(4455)
- LWL-Steckverbinder(3001)
- FFC, FPC (flache flexible) Steckverbinder - Gehäuse(652)
- FFC, FPC (flache flexible) Anschlüsse - Kontakte(202)
- FFC, FPC (flache flexible) Anschlüsse(18691)
- D-Sub, d-förmige Steckverbinder-Terminatoren(47)
- D-Sub, d-förmige Steckverbinder-Gehäuse(12238)
- D-Sub, d-förmige Steckverbinder-Kontakte(2714)
- D-Sub, D-förmige Steckverbinder-Rückenschalen, Kapuzen(5995)
- D-Sub, d-förmige Steckverbinder-Adapter(1304)
- D-Sub Steckverbinder(141346)
- D-förmige Steckverbinder-Centronics(8770)
- Kontakte, Frühling geladen und Druck(630)
- Kontakte-Multi Purpose(6196)
- Kontakte-"Leadframe"(122)
- Koaxial-Steckverbinder (RF)-Terminatoren(1231)
- Koaxial-Steckverbinder (RF)-Kontakte(480)
- Koaxial-Steckverbinder (RF)-Adapter(6386)
- Koaxialverbinder (RF)(25734)
- Rundsteckverbinder-Gehäuse(441226)
- Rundsteckverbinder-Kontakte(4737)
- Rundsteckverbinder-backschalen und Kabel-Klemmen(53692)
- Rundsteckverbinder-Adapter(8839)
- Rundanschlüsse(1196254)
- Card Edge Steckverbinder-Gehäuse(469)
- Karte Edge Verbinder-edgeboard Verbinder(672683)
- Card Edge Verbinder-Kontakte(325)
- Card Edge Verbinder-Adapter(73)
- Blade Type Power Steckverbinder-Gehäuse(837)
- Blade Type Power Connectors-Kontakte(393)
- Stromanbeter Blade Type(4163)
- Zwischen Serien-Adapter(649)
- Barrel-Stromanschluss(935)
- Barrel-Audio-Anschlüsse(2432)
- Barrel-Audio Adapter(92)
- Banana und Tip Steckverbinder-Buchsen, Stecker(1644)
- Banana and Tip Connectors-Binding Posts(239)
- Banana und Tip Steckverbinder-Adapter(75)
- Backplane Steckverbinder-spezialisiert(45586)
- Backplane Steckverbinder-Gehäuse(6863)
- Backplane Steckverbinder-Hard metrisch, Standard(6297)
- Backplane Steckverbinder-DIN 41612(9408)
- Backplane Steckverbinder-Kontakte(3583)
- Backplane Connectors-ARINC Einsätze(2357)
- Backplane Steckverbinder-ARINC(3789)
Relevanter Hersteller







-
Widerstände
-
Kondensatoren
Kondensatoren
- Aluminium-Elektrolytkondensatoren(16817)
- Trimmer, Variable Kondensatoren(3151)
- Dünne Folien-Kondensatoren(3473)
- Tantal-Kondensatoren(136103)
- Tantal-Polymer-Kondensatoren(9778)
- Silizium-Kondensatoren(320)
- Niob Oxide Kondensatoren(330)
- Mica und PTFE Kondensatoren(9101)
- Folien-Kondensatoren(150406)
- Elektrische Doppelschichtkondensatoren (EDLC), Superkondensatoren(2782)
- Keramische Kondensatoren(833829)
- Kondensatoren-Netzwerke, Arrays(2383)
- Aluminium-Elektrolytkondensatoren(125325)
- Aluminium-Polymer-Kondensatoren(7544)
Relevanter Hersteller






-
Transformatoren
Transformatoren
Relevanter Hersteller







-
Isolatoren
-
Kristalle, Oszillatoren, Resonatoren
Kristalle, Oszillatoren, Resonatoren
Relevanter Hersteller






-
Switches
Switches
- Verriegelungsschalter(2893)
- Emergency-Stop-Schalter (E-Stop)(1160)
- Kabelzugschalter(571)
- Toggle-Schalter(33608)
- Rändelrads Schalter(742)
- Schalter(14263)
- Snap-Aktion, Endschalter begrenzen(28077)
- Slide-Schalter(5166)
- Selector-Schalter(9720)
- Rotary Switches(13850)
- Rocker Schalter(53790)
- Drucktaste-Schalter-Hall-Effekt(127)
- Drucktaste Schalter(190826)
- Programmierbare Display-Switches(39)
- Navigations-Schalter, Joystick(1882)
- Magnetische, Reed-Schalter(1399)
- Keypad-Schalter(637)
- Keylock Schalter(3684)
- DIP Schalter(7747)
- Konfigurierbare Switch-Komponenten-Objektiv(1435)
- Konfigurierbare Schalter-Komponenten-Lichtquelle(1236)
- Konfigurierbare Switch-Komponenten-Contact Block(1401)
- Konfigurierbare Switch-Komponenten-Body(16077)
- Disconnect-Switch-Komponenten(2567)
Relevanter Hersteller






-
Relais
Relais
- Sicherheitsrelais(1310)
- Reedrelais(1735)
- Hochfrequenz (RF) -Relais(1190)
- Schütze (Festkörper)(686)
- Schütze (elektromechanisch)(11952)
- Kfz-Relais(1881)
- Solid State Relais(10652)
- Signal-Relais, bis zu 2 Ampere(9149)
- Relay-Sockets(2075)
- Power Relays, über 2 Ampere(31604)
- E / A-Relaismodule(712)
- I/o-Relay-Module-Input(2)
- I/o-Relay-Modul-Racks(247)
Relevanter Hersteller
















Sprache auswählen
Aktuelle Sprache
Deutsch
- English
- Deutsch
- Italia
- Français
- 日本語
- 한국의
- русский
- Svenska
- Nederland
- español
- Português
- polski
- Suomi
- Gaeilge
- Slovenská
- Slovenija
- Čeština
- Melayu
- Magyarország
- Hrvatska
- Dansk
- românesc
- Indonesia
- Ελλάδα
- Български език
- Afrikaans
- IsiXhosa
- isiZulu
- lietuvių
- Maori
- Kongeriket
- Монголулс
- O'zbek
- Tiếng Việt
- हिंदी
- اردو
- Kurdî
- Català
- Bosna
- Euskera
- العربية
- فارسی
- Corsa
- Chicheŵa
- עִבְרִית
- Latviešu
- Hausa
- Беларусь
- አማርኛ
- Republika e Shqipërisë
- Eesti Vabariik
- íslenska
- မြန်မာ
- Македонски
- Lëtzebuergesch
- საქართველო
- Cambodia
- Pilipino
- Azərbaycan
- ພາສາລາວ
- বাংলা ভাষার
- پښتو
- malaɡasʲ
- Кыргыз тили
- Ayiti
- Қазақша
- Samoa
- සිංහල
- ภาษาไทย
- Україна
- Kiswahili
- Cрпски
- Galego
- नेपाली
- Sesotho
- Тоҷикӣ
- Türk dili
- ગુજરાતી
- ಕನ್ನಡkannaḍa
- मराठी
L9110 Motor Driver IC Anwendungsschaltung und Arbeitsanleitung
Zeit: 2026/06/30
Durchsuchen: 11
Dieser Artikel erklärt den L9110 auf einfache Weise, einschließlich seiner Pinbelegung, Spezifikationen, Anschlussmethode, Schaltplänen, Vergleich mit anderen Motorfahrern und wie man herausfindet, ob es der richtige Fahrer für Ihren Motor ist.
Index
Grundlagen des L9110 Dual-Channel Motor Driver IC
Der L9110 ist ein kleiner Dual-Channel Motorfahrer IC, der verwendet wird, um Niedrigstrommotoren durch digitale Steuersignale zu steuern. Er kombiniert zwei Treiberkanäle in einem kompakten Chip, was hilft, die Anzahl der externen Komponenten, die in einer Motorsteuerungsschaltung benötigt werden, zu reduzieren. Aufgrund seines einfachen Designs wird er häufig in kleinen elektronischen Systemen eingesetzt, die eine grundlegende Motorsteuerung benötigen.
Dieser IC akzeptiert TTL- und CMOS-kompatible Eingangssignale, sodass er leicht an viele digitale Steuerkreise angeschlossen werden kann. Seine Struktur mit zwei Kanälen ermöglicht es ihm, entweder zwei separate Motorausgänge oder eine bidirektionale Motorsteuerung zu handhaben, abhängig vom Schaltungsdesign. Der L9110 wird hauptsächlich gewählt, wenn ein einfacher, kostengünstiger und kompakter Motorfahrer benötigt wird.
In Bezug auf die elektrische Leistung kann jeder Kanal normalerweise etwa 750 mA bis 800 mA Dauerstrom liefern, mit einem kurzen Spitzenstrom von etwa 1,5 A bis 2,0 A. Er hat auch eine niedrige Ausgangssättigungsspannung, die hilft, den Energieverlust während des Betriebs zu reduzieren. Der L9110 beinhaltet auch einen integrierten Schutz mit Klemmdiode für induktive Lastumschaltung. Diese Funktion schützt den IC vor Spannungsspitzen, die entstehen, wenn ein Motor oder eine ähnliche Last ein- oder ausgeschaltet wird.
Wie der L9110 funktioniert
Das Bild zeigt, wie der L9110 zwischen einem Mikrocontroller und einem DC-Motor funktioniert. Der Arduino sendet zwei Niedrigstrom-Steuersignale an den L9110, die als Vorwärtssignal und Rückwärtssignal dargestellt werden. Diese Signale treiben den Motor nicht direkt an. Stattdessen sagen sie dem L9110, wie er seinen Ausgang umschalten soll, damit der Motor in die richtige Richtung läuft.
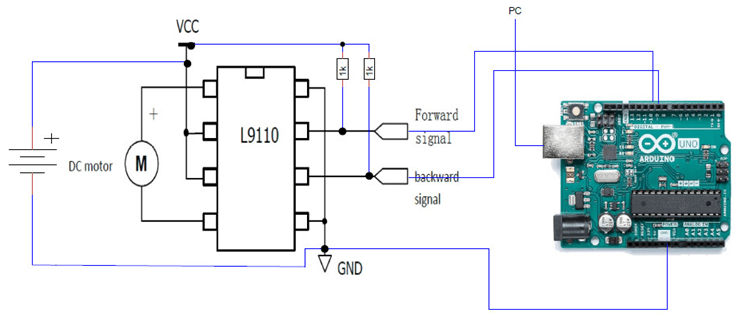
Der L9110 fungiert als Motorfahrer, da ein Mikrocontroller-Pin nicht genügend Strom für einen Motor liefern kann. In der Schaltung ist der Motor mit der Ausgangsseite des L9110 verbunden, während der Arduino mit der Eingangsseite verbunden ist. Der L9110 empfängt die Steuersignale und nutzt die Motorstromversorgung, um den höheren Strom zu liefern, den der Motor benötigt.
Wenn das Vorwärtssignal aktiv und das Rückwärtssignal inaktiv ist, lässt der L9110 den Strom in eine Richtung durch den Motor fließen. Wenn das Rückwärtssignal aktiv und das Vorwärtssignal inaktiv ist, wird die Stromrichtung umgekehrt, sodass sich der Motor in die andere Richtung dreht. Wenn beide Eingangssignale im gleichen Zustand sind, stoppt der Motor oder bremst, je nach Zustand der Schaltung.
Die Motorengeschwindigkeit kann auch gesteuert werden, indem ein PWM-Signal vom Mikrocontroller an einen Eingangspin gesendet wird. PWM verändert die durchschnittliche Spannung, die an den Motor gesendet wird, sodass ein höherer Tastgrad den Motor schneller laufen lässt und ein niedrigerer Tastgrad ihn langsamer macht. Der L9110 enthält auch einen Klemmdiodeschutz, um Spannungsstößen zu helfen, die beim Ein- oder Ausschalten des Motors erzeugt werden.
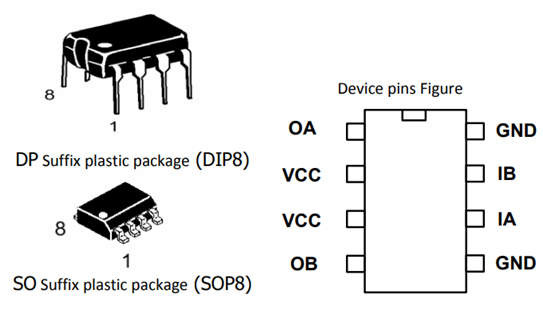
L9110 Pinout und Pin Funktionen
| Pin Nr. |
Pin Name |
Funktion |
| 1 |
OA |
Ausgang A. Dieser Pin verbindet sich mit einer Seite des Motors oder der Last und liefert den Ausgang von Kanal A. |
| 2 |
VCC |
Speisespannungs-Pin. Verbinden Sie diesen Pin mit der positiven Versorgungsspannung des IC. |
| 3 |
VCC |
Speisespannungs-Pin. Dieser ist ebenfalls mit der positiven Versorgungsspannung verbunden. |
| 4 |
OB |
Ausgang B. Dieser Pin verbindet sich mit dem anderen Motorausgang oder Lastausgang von Kanal B. |
| 5 |
GND |
Masse-Pin. Verbinden Sie diesen Pin mit der Schaltungsmasse. |
| 6 |
IA |
Eingang A. Dieser Steuerungseingang wird verwendet, um einen Ausgangskanal des L9110 zu steuern. |
| 7 |
IB |
Eingang B. Dieser Steuerungseingang wird verwendet, um den anderen Ausgangskanal des L9110 zu steuern. |
| 8 |
GND |
Masse-Pin. Dieser ist ebenfalls mit der Schaltungsmasse verbunden. |
L9110 Technische Spezifikationen
| Spezifikation |
Wert |
| IC Name |
L9110 |
| Treibertyp |
Dual-Kanal Motorsteuerungs-IC |
| Versorgungsspannung |
2,5V bis 12V |
| Typische Versorgungsspannung |
6V |
| Ruhe-Stromverbrauch |
0 bis 2 µA |
| Eingangsbetriebsstrom |
200 bis 500 µA |
| Dauerstrom |
750 mA bis 850 mA pro Kanal |
| Typischer Dauerstrom |
800 mA pro Kanal |
| Spitzenstrom |
1,5A bis 2,0A |
| Anzahl der Kanäle |
2 Kanäle |
| Eingangs-Pins |
IA und IB |
| Ausgangs-Pins |
OA und OB |
| Logik Kompatibilität |
TTL / CMOS |
| Ausgangsstruktur |
Push-Pull-Ausgang |
| Motorrichtungssteuerung |
Vorwärts und Rückwärts |
| Schutzeigenschaft |
Eingebaute Clamp-Dioden-Schutz |
| Gehäusetypen |
DIP8 und SOP8 |
| Hauptvorteil |
Einfache, kompakte und kostengünstige Motorsteuerung |
| Hauptbeschränkung |
Nicht geeignet für Hochstrommotoren |
L9110 Eingangs- und Ausgangs-Zeitdiagramm
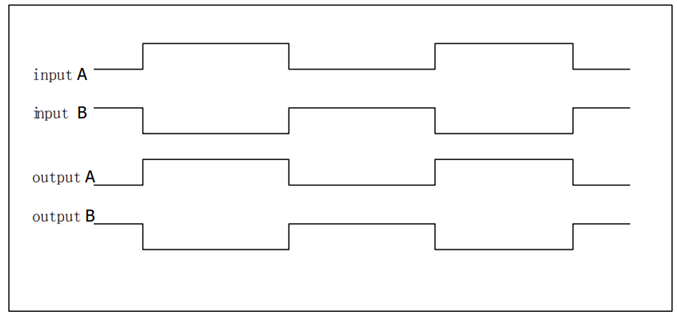
Das Eingangs- und Ausgangs-Zeitdiagramm des L9110 zeigt die Beziehung zwischen den Steuersignalen und den Treiberausgängen. Eingang A steuert Ausgang A, während Eingang B Ausgang B steuert. Wenn das Eingangssignal von niedrig auf hoch oder von hoch auf niedrig wechselt, folgt der entsprechende Ausgang dem gleichen Schaltzustand. Durch Ändern der Logikpegel von Eingang A und Eingang B ändert der L9110 die Spannungspolarität an den Motoranschlüssen und ermöglicht eine grundlegende Richtungssteuerung. Dieses Diagramm hilft zu erklären, wie digitale Steuersignale in motorsteuernde Ausgangssignale umgewandelt werden.
Schließen Sie das L9110-Modul an einen Mikrocontroller an
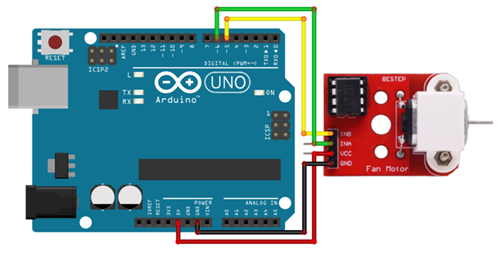
Das L9110-Modul wird über vier Hauptpins an einen Mikrocontroller angeschlossen: VCC, GND, INA und INB. Der VCC-Pin wird mit der Stromversorgung verbunden, während der GND-Pin mit der Masse des Mikrocontrollers verbunden wird. Eine gemeinsame Masse ist wichtig, damit die Steuersignale korrekt funktionieren.
Die Pins INA und INB werden mit zwei digitalen Pins des Mikrocontrollers verbunden. Diese Pins senden HIGH- und LOW-Signale zur Steuerung der Motordirektion. Im Diagramm ist das L9110-Modul mit einem Arduino Uno verbunden, wobei die Eingangspins an digitale Pins angeschlossen sind.
Der Motor wird an die Ausgangsterminals des L9110-Moduls angeschlossen. Wenn der Mikrocontroller Signale an INA und INB sendet, steuert das Modul den Motor vorwärts, rückwärts oder stoppt je nach Eingabekombination. Für die Geschwindigkeitsregelung kann ein PWM-Signal an einen der Eingangspins angelegt werden.
L9110 Anwendungs-Schaltbild
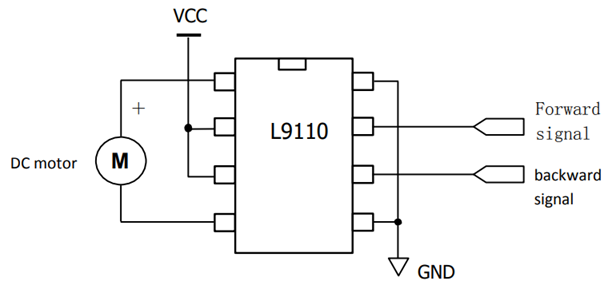
Grundlegendes DC-Motorsteuerungsschaltbild
Das grundlegende L9110-Anwendungsschaltbild zeigt, wie ein DC-Motor mit dem Treiber-IC verbunden werden kann. Der Motor ist mit den Ausgangspins des L9110 verbunden, während die Eingangspins die Vorwärts- und Rückwärtssteuersignale empfangen. Der VCC-Pin versorgt den Treiber mit Strom, und der GND-Pin ist mit der Schaltungsmasse verbunden.
Wenn das Vorwärtssignal aktiv ist, führt der L9110 Strom durch den Motor in eine Richtung. Wenn das Rückwärtssignal aktiv ist, kehrt der Treiber den Stromfluss um, was den Motor in die entgegengesetzte Richtung drehen lässt. Dies macht die Schaltung einfach zu bedienen, da nur zwei Steuersignale für eine grundlegende Motorrichtungssteuerung benötigt werden.
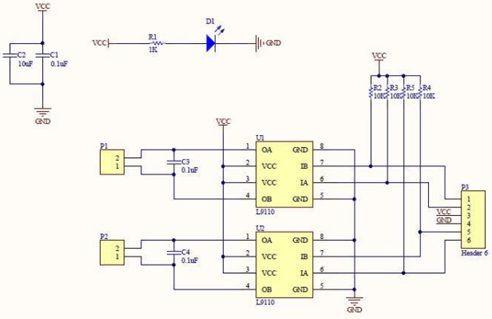
L9110-Modul-Schaltbild
Das L9110-Modul-Schema zeigt einen vollständigen Schaltplan mit zwei L9110-Treiber-ICs. Jedes IC hat Eingangs-, Ausgangs-, VCC- und GND-Anschlüsse. Die Ausgangsanschlüsse sind mit Motoranschlüssen verbunden, während die Eingangsanschlüsse zu einem Stecker geleitet werden, damit sie von einem Mikrocontroller gesteuert werden können.
Das Schema enthält auch kleine Kondensatoren, die in der Nähe der Energie- und Motorleitungen angeschlossen sind. Diese Kondensatoren helfen, elektrische Störungen zu reduzieren, die durch das Schalten des Motors verursacht werden. Die Widerstände und die LED werden als einfache Energieanzeige-Schaltung verwendet. Dieser Typ von Modulschaltung ist nützlich, da er bereits die grundlegenden Unterstützungskomponenten enthält, die für einen stabilen Betrieb des Motorantriebs erforderlich sind.
L9110 vs Andere Motorsteuerung
L9110 vs L298N Motorsteuerung
Der L9110 ist kleiner und besser für Niederspannungs-Motoren geeignet, während der L298N für Motoren ausgelegt ist, die höhere Spannung und Stromstärke benötigen. Der L298N kann größere Motoren antreiben, ist jedoch weniger effizient, da er einen höheren Spannungsabfall hat. Das bedeutet, dass er mehr Energie als Wärme verschwenden kann. Der L9110 ist besser geeignet, wenn die Schaltung einen kleinen, günstigen und einfachen Motorantrieb benötigt. Der L298N ist besser, wenn der Motor mehr Leistung benötigt, aber er benötigt normalerweise mehr Platz auf der Platine und eine bessere Wärmeableitung.
L9110 vs TB6612FNG Motorsteuerung
Der TB6612FNG ist effizienter als der L9110, da er MOSFET-Ausgangsstufen verwendet. Er erzeugt weniger Wärme, unterstützt eine bessere PWM-Geschwindigkeitsregelung und ist besser für einen sanfteren Motorbetrieb geeignet. Der L9110 ist einfacher und normalerweise günstiger, hat jedoch größere Einschränkungen bei der Stromhandhabung und Leistung. Der TB6612FNG ist die bessere Wahl, wenn Effizienz, Geschwindigkeitsregelung und geringere Wärme wichtig sind.
L9110 vs DRV8833 Motorsteuerung
Der DRV8833 ist fortschrittlicher als der L9110. Er hat eine bessere Effizienz und enthält normalerweise stärkere Schutzeigenschaften, wie z. B. Überstromschutz, thermische Abschaltung und Unterspannungsschutz. Der L9110 reicht für einfache kostengünstige Motorsteuerungen aus, aber der DRV8833 ist besser für kompakte Designs geeignet, die eine bessere Zuverlässigkeit, geringere Wärme und sichereren Motorbetrieb benötigen.
Wie man den richtigen Motor für L9110 auswählt
Wählen Sie einen Motor, der den Spannungs- und Stromgrenzen des L9110 entspricht. Die Motor Spannung sollte innerhalb des Spannungsbereichs des L9110 bleiben, normalerweise 2,5 V bis 12 V. Ein kleiner Gleichstrommotor mit 3 V, 5 V, 6 V oder 9 V lässt sich normalerweise besser mit diesem Treiber kombinieren. Der L9110 kann normalerweise etwa 750 mA bis 800 mA kontinuierlichen Strom pro Kanal verarbeiten, mit einem kurzen Spitzenstrom von etwa 1,5 A bis 2 A. Der Betriebsstrom und der Stillstandsstrom des Motors sollten diese Grenzen nicht überschreiten. Der Stillstandsstrom ist wichtig, da er auftritt, wenn der Motor startet, blockiert wird oder eine schwere Last trägt.
Sie sollten auch die Motorgröße und die Belastung berücksichtigen. Der L9110 eignet sich am besten für kleine Motoren mit leichten mechanischen Lasten. Wenn der Motor heiß wird, langsamer wird oder den Treiber schnell erwärmt, könnte der Motor für den L9110 zu groß sein. In diesem Fall ist ein Treiber mit höherem Strom die sichere Wahl.
Wann Sie den L9110 nicht verwenden sollten
Sie sollten den L9110 nicht verwenden, wenn der Motor mehr Strom benötigt, als der Treiber sicher verarbeiten kann. Der L9110 ist für kleine Motoren ausgelegt und eignet sich daher nicht für große Gleichstrommotoren, Hochmomentmotoren oder Motoren mit hohem Stillstandsstrom. Wenn der Motor zu viel Strom zieht, kann das IC überhitzen, die Leistung verlieren oder beschädigt werden.
Der L9110 ist auch nicht die beste Wahl für Anwendungen, die starke Schutzeigenschaften benötigen. Er verfügt über einen grundlegenden Schutz durch Klemmdiode, bietet jedoch nicht das gleiche Schutzniveau wie fortschrittlichere Motorsteuerungen, wie z.B. Überstromschutz, thermische Abschaltung oder Unterspannungsschutz. Sie sollten auch vermeiden, den L9110 zu verwenden, wenn die Schaltung eine sehr effiziente Motorsteuerung, Hochgeschwindigkeits-PWM-Leistung oder einen langen Betrieb unter hoher Last benötigt. In diesen Fällen ist ein leistungsfähigerer Treiber wie der TB6612FNG oder DRV8833 normalerweise die bessere Wahl.
Häufig gestellte Fragen [FAQ]
1. Kann der L9110 gleichzeitig zwei Motoren antreiben?
Ja. Der L9110 hat zwei Treiberkanäle, sodass er zwei kleine Gleichstrommotoren steuern kann, wenn jeder Motor innerhalb der Spannungs- und Stromgrenzen des IC bleibt. Beide Motoren dürfen jedoch nicht zu viel Strom ziehen, insbesondere während des Startvorgangs oder unter Stillstandbedingungen.
2. Warum sollte der Stillstandsstrom des Motors vor der Verwendung des L9110 überprüft werden?
Der Stallstrom ist der höchste Strom, den der Motor ziehen kann, wenn er blockiert ist oder aus dem Stillstand startet. Selbst wenn der Betriebsstrom sicher aussieht, kann ein hoher Stallstrom den L9110 überlasten und Überhitzung oder Schäden am IC verursachen.
3. Kann der L9110 direkt von einem Arduino 5V-Pin gespeist werden?
Es kann für sehr kleine Motoren funktionieren, wird aber nicht immer empfohlen. Motoren können plötzliche Stromspitzen ziehen, die den Arduino zurücksetzen oder den Schaltkreis instabil machen können. Für bessere Zuverlässigkeit verwenden Sie eine separate Motorstromversorgung und verbinden Sie die Erdungen miteinander.
4. Warum wird der L9110 während des Betriebs heiß?
Der L9110 kann sich erhitzen, wenn der Motor hohen Strom zieht, unter hoher Last läuft oder nahe der Stromgrenze des ICs arbeitet. Die Wärme kann auch steigen, wenn die Betriebsspannung zu hoch für den Motor ist oder wenn der Motor blockiert ist.
5. Kann der L9110 die Motordrehzahl steuern?
Ja. Die Motordrehzahl kann gesteuert werden, indem ein PWM-Signal an einen der Eingangspins angelegt wird. Ein höherer PWM-Duty-Cycle liefert eine höhere durchschnittliche Spannung an den Motor, während ein niedrigerer Duty-Cycle die Motordrehzahl reduziert.
6. Was passiert, wenn beide L9110-Eingangspins HIGH oder LOW sind?
Wenn beide Eingangspins im gleichen Logikzustand sind, hört der Motor normalerweise auf oder bremst, je nach Schaltungszustand. Dies liegt daran, dass es kaum oder keinen Spannungsunterschied über den Motorklemmen gibt.
7. Ist der L9110 besser als der L298N?
Der L9110 ist besser für kleine, schwach leistungsfähige Schaltungen, da er kompakt und einfach ist. Der L298N kann größere Motoren handhaben, hat jedoch einen höheren Spannungsabfall, erzeugt mehr Wärme und benötigt mehr Platz auf der Platine.
Verwandter Artikel
-
![Vakuum-Schalter (VCB) Konstruktion, Betrieb und Auswahl Tipps]() Jun 30 2026
Jun 30 2026

Verwandte -Produkte
12063D475MAT2A
CAP CER 4.7UF 25V X5R 1206

CQ0402JRNPO9BN110
CAP CER 11PF 50V C0G/NPO 0402

12063A150JAT2A
CAP CER 15PF 25V NP0 1206

TPSR475K010R5000
CAP TANT 4.7UF 10% 10V 0805
5AGXFA7H4F35I5N
IC FPGA 544 I/O 1152FBGA

MAX4257ESA+T
IC OPAMP GP 2 CIRCUIT 8SOIC

LMV614MT/NOPB
IC OPAMP GP 4 CIRCUIT 14TSSOP

MIC5219-2.85BMM
IC REG LINEAR 2.85V 500MA 8MSOP

XC9572XL-10VQG64I
IC CPLD 72MC 10NS 64VQFP

CD8437DK
PHI TSOP20

NT68671UFG
NT68671UFG NQVATEK

ATTINY414-SSNR
IC MCU 8BIT 4KB FLASH 14SOIC

HMC712LP3E
ADI QFN