Alle Kategorien
-
Integrierte schaltkreise (ICS)
Integrierte schaltkreise (ICS)
- Schnittstelle - Sensor, kapazitive Berührung(642)
- Spezialisierte ICS(12302)
- PMIC-Spannungsregler-besonderer Zweck(5644)
- PMIC-Spannungsregler-lineare Regler(793)
- PMIC-Spannungsregler-linear + Switching(1829)
- PMIC-Spannungsregler-linear(70981)
- PMIC-Spannungsregler-DC DC Switching Regulators(39569)
- PMIC-Regler-DC-DC-Switching-Controller(13507)
- PMIC-Spannungs-Referenz(9453)
- PMIC-v/f und f/v-Wandler(145)
- PMIC-Thermal Management(592)
- PMIC-Supervisor(47946)
- PMIC-RMS bis DC-Wandler(170)
- PMIC-Netzteil-Controller, Monitore(2104)
- PMIC-Power over Ethernet (PoE) Controller(1008)
- PMIC-Power Management-spezialisierte(7722)
- PMIC-Netzschalter, Treiber laden(7706)
- PMIC-PFC (Power Factor Correction)(1222)
- PMIC oder Steuerungen, ideale Dioden(705)
- PMIC-Motor-Treiber, Regler(4712)
- PMIC-Beleuchtung, Ballast-Regler(560)
- PMIC-LED-Treiber(7282)
- PMIC-Laser-Treiber(573)
- PMIC-Hot-Swap-Controller(2816)
- PMIC-Gate-Treiber(7083)
- PMIC-voll, Half-Bridge-Treiber(1342)
- PMIC-Energy Messung(654)
- PMIC-Display-Treiber(1435)
- PMIC-derzeitige Regulierung/Management(1481)
- PMIC-Batterie-Management(5553)
- PMIC-Ladegeräte(3831)
- PMIC-AC DC Konverter, Offline Schalter(4905)
- Memory-Controller(358)
- Memory-Konfigurations-Proms für FPGAs(639)
- Speicher-Akkus(13)
- Erinnerung(65694)
- Logic-universelle Bus-Funktionen(706)
- Logic-Übersetzer, Level-Shifter(2854)
- Logik-Specialty Logic(1870)
- Logik-Signal-Schalter, Multiplexer, Decoder(9420)
- Logic-Shift-Register(2665)
- Logic-Parity Generatoren und Checkers(335)
- Logic-multivibratoren(831)
- Logik-Latches(3658)
- Logik - Tore und Wechselrichter - Multifunktion, konfigurierbar(1687)
- Logik-Tore und Wechselrichter(16453)
- Logic-Flip Flops(7780)
- Logik-FIFOs Speicher(4240)
- Logik-Zähler, Trennlinien(3456)
- Logik-Vergleichsoperator(592)
- Logik-Puffer, Treiber, Receiver, Transceiver(17835)
- Linear-Video-Verarbeitung(2909)
- Linear-Vergleichsoperator(5084)
- Linear-analoge Multiplikatoren, Trennwände(263)
- Linear-Verstärker-Video Amps und Module(1905)
- Linear-Verstärker-Spezial-Zweck(1856)
- Linear - Verstärker - Instrumentierung, OP -Verstärker, Pufferverstärker(34236)
- Linear-Verstärker-Audio(4567)
- Interface-Voice Record und Playback(556)
- Schnittstelle - UARTs (Universal Asynchronous Receivers -Sender)(1237)
- Schnittstelle-Telecom(4467)
- Interface-spezialisierte(4833)
- Interface-Signal Terminatoren(333)
- Interface-Signal-Puffer, Repeater, Splitter(1449)
- Interface-Serializer, Deserializer(1480)
- Schnittstellen-Sensor und Detektor-Interfaces(1524)
- Interface-Module(169)
- Interface-Modems-ICS und Module(407)
- Interface-e/a-Expander(1136)
- Interface-Filter-aktiv(1226)
- Interface-Encoder, Decoder, Konverter(714)
- Interface-Treiber, Receiver, Transceiver(20755)
- Interface-Direct Digital Synthesis (DDS)(117)
- Interface-Controller(3628)
- Interface-Codecs(1676)
- Schnittstelle - Analoge Switches, Multiplexer, Demultiplexer(12567)
- Schnittstelle-analoge Schalter-spezieller Zweck(2533)
- Embedded-System on Chip (SoC)(4496)
- Embedded-PLDs (programmierbare Logik-Vorrichtung)(971)
- Embedded-Mikroprozessoren(10083)
- Embedded-Mikrocontroller-anwendungsspezifische(2275)
- Embedded-Mikrocontroller(99285)
- Eingebettet - Mikrocontroller, Mikroprozessor, FPGA -Module(1527)
- Eingebettet - FPGAs (Feldprogrammiergate -Array) mit Mikrocontrollern(81)
- Embedded-FPGAs (Field Programmable Gate Array)(27747)
- Embedded-DSP (Digital Signal Processors)(4081)
- Eingebettet - CPLDs (komplexe programmierbare Logikgeräte)(5187)
- Datenerfassung-Touch Screen Controller(1210)
- Datenerfassung-Digital to Analog Converter (DAC)(14419)
- Datenerfassung-digitale Potentiometer(6250)
- Datenerfassung-analog zu Digital Converters (ADC)(17776)
- Datenerfassung-analoges Frontend (AFE)(787)
- Datenerfassung-MDE/DACs-spezieller Zweck(3043)
- Clock/Timing-Uhren in Echtzeit(2446)
- Uhr/Timing - programmierbare Timer und Oszillatoren(23469)
- Clock/Timing-IC-Akkus(4)
- Takt/Timing-Delay Lines(1049)
- Uhr/Timing - Uhrengeneratoren, PLLS, Frequenzsynthesizer(32775)
- Clock/Timing-Clock Puffer, Treiber(4568)
- Clock/Timing-anwendungsspezifische(8652)
- Audio Spezial-Zweck(1564)
Relevanter Hersteller







-
Diskrete Halbleiter-Produkte
Diskrete Halbleiter-Produkte
- Aktuelle Regulierung - Dioden, Transistoren(1090)
- Transistoren-besonderer Zweck(226)
- Transistoren-programmierbare Unijunction(48)
- Transistoren-jfets(1558)
- Transistoren-IGBTs-Einzel(4799)
- Transistoren-IGBTs-Module(63420)
- Transistoren-IGBTs-Arrays(26)
- Transistoren-FETs, MOSFETs-Einzel(48330)
- Transistoren-FETs, MOSFETs-RF(4903)
- Transistoren-FETs, MOSFETs-Arrays(6641)
- Transistoren-Bipolar (BJT)-einzeln, Pre-biased(4539)
- Transistoren-Bipolar (BJT)-Einzel(25800)
- Transistoren-Bipolar (BJT)-RF(2087)
- Transistoren-bipolare (BJT)-Arrays, Pre-biased(2115)
- Transistoren-bipolare (BJT)-Arrays(2310)
- Thyristor-triacs(4044)
- Thyristoren-SCRs-Module(3967)
- Thyristoren-SCRs(5436)
- Thyristoren-diacs, sidacs(319)
- Power Driver Module(1627)
- Dioden-zenerdioden-Einzel(87483)
- Dioden-zenerdioden-Arrays(2619)
- Dioden - variable Kapazität (Varik, Varaktoren)(1200)
- Dioden-RF(2753)
- Dioden-Gleichrichter-Einzel(67528)
- Dioden-Gleichrichter-Arrays(20581)
- Dioden-Brücke-Gleichrichter(11700)
Relevanter Hersteller




-
RF/if und RFID
RF/if und RFID
- SIM -Karten für Abonnenten -Identifikationsmodul (SIM)(77)
- RF -Zirkulatoren und Isolatoren(1742)
- RFID, RF-Zugang, Monitoring-ICS(1550)
- RFID Transponder, Tags(747)
- RFID Lesegeräte(464)
- RFID -Bewertungs- und Entwicklungskits, Boards(30)
- RFID Antennen(329)
- RFI und EMI - Abschirm- und Absorbungsmaterialien(6444)
- HF und EMI-Kontakte, Fingerstock und Dichtungen(7497)
- RF Transmitter(668)
- RF Transceiver Module(6900)
- RF-Transceiver ICS(4169)
- HF-Schalter(9276)
- RF Shields(16401)
- HF-Receiver(1998)
- HF -Empfänger, Sender und Transceiver -Einheiten(2763)
- RF Power Divider/Splitter(1223)
- RF Power Controller ICs(86)
- HF-Modulatoren(710)
- HF-Mixer(2800)
- RF misc ICS und Module(3276)
- HF-Front-End (LNA + PA)(419)
- RF -Bewertungs- und Entwicklungskits, Boards(747)
- HF-gerichtete Kupplung(2718)
- RF Diplexer(1464)
- RF-Detektoren(412)
- RF-Demodulatoren(249)
- HF-Antennen(12319)
- HF-Verstärker(19651)
- Balun(1496)
- Dämpfungsglieder(4852)
Relevanter Hersteller







-
Optoelektronik
Optoelektronik
- Optomechanisch(480)
- Leuchten(125)
- Laserdioden, Lasermodule - Laserlieferung, Laserfasern(345)
- Hene Lasersysteme(31)
- Hene Laserköpfe(27)
- Hintergrundbeleuchtung anzeigen(93)
- Xenon-Beleuchtung(387)
- Touchscreen-Overlays(453)
- Panel Indicators, Pilot Lights(75729)
- Optik-Remote-Phosphor-Lichtquelle(269)
- Optik-Reflektoren(665)
- Optik-leichte Rohre(5384)
- Optik-Objektive(4951)
- LEDs-Spacer, Unentschieden(2718)
- LEDs-Lamp-Ersetzungen(29718)
- LEDs - Leiterplattenindikatoren, Arrays, Lichtstäbe, Balkendiagramme(9083)
- LED-thermische Produkte(667)
- LED-Beleuchtung(64)
- LED-Beleuchtung-weiß(37580)
- LED-Beleuchtung-Farbe(4728)
- LED-Beleuchtung-Maiskolben, Motoren, Module(28735)
- LED-Anzeige-diskret(27601)
- Laserdioden, Module(1553)
- Lampen-Glühlampen, Neons(311004)
- Lampen-Kälte-Fluoreszenz (KKL) & UV(164)
- Wechselrichter(7728)
- Infrarot, UV, sichtbare Strahler(3871)
- Fiber Optics-Transmitter-Antrieb integriert(4085)
- Fiber Optics-Transmitter-diskrete(350)
- Fiber Optics-Transceiver Module(18758)
- Fiberoptik-Switches, Multiplexer, Demultiplexer(1387)
- Fiberoptik-Receiver(695)
- Fiberoptik-Dämpfung(654)
- Elektrolumineszenz(102)
- Display, Monitor-Interface Controller(98)
- Display-Module-Vakuum-Leuchtstofflampen (VFD)(249)
- Module anzeigen-LED Dot Matrix und Cluster(865)
- Display-Module-LED-Zeichen und numerische(5421)
- Display-Module-LCD, OLED, Graphic(4654)
- Display-Module-LCD, OLED-Zeichen und numerische(2202)
- Display-Blenden, Objektive(88)
- Adresse, Spezialität(458)
Relevanter Hersteller







-
Sensoren, Wandler
Sensoren, Wandler
- Ultraschallempfänger, Sender - Industrial(115)
- Temperatursensoren - Thermostate - Mechanisch - Industrielles(3103)
- Temperatursensoren - Analog und digitaler Ausgang - Industrial(209)
- Näherungssensoren - Industrial(13611)
- Drucksensoren, Wandler - Industrie(26503)
- Optische Sensoren - Photonik - Zähler, Detektoren, SPCM (Einzelphotonzählmodul)(751)
- Optische Sensoren - Kameramodule(875)
- Magnetsensoren - Position, Nähe, Geschwindigkeit (Module) - Industrie(554)
- Kraftsensoren - Industrial(346)
- Flusssensoren - Industrielles(151)
- Float, Level Sensoren - Industrial(310)
- Encoder - Industrial(4980)
- Farbsensoren - Industrial(50)
- Berührungssensoren(100)
- Ultraschall-Receiver, Transmitter(2421)
- Temperatursensoren-Thermostat-Solid State(1096)
- Temperatursensoren-Thermostate-mechanisch(3397)
- Temperatursensoren - Thermoelemente, Temperatursonden(1921)
- Temperatursensoren - RTD (Widerstandstemperaturdetektor)(1525)
- Temperatursensoren-PTC-Thermistoren(2273)
- Temperatursensoren-ntc-thermistoren(13259)
- Temperatursensoren-Analog und Digital Output(3928)
- DMS(1399)
- Spezialisierte Sensoren(1861)
- Solarzellen(503)
- Schock-Sensoren(84)
- Sensor-Interface-Junction-Blöcke(2519)
- Sensor-Kabel-Baugruppen(22011)
- Proximity/Belegung Sensoren-fertige Einheiten(725)
- Näherungsschalter(2860)
- Drucksensoren, Wandler(11317)
- Positionssensoren - Winkel, lineare Positionsmessung(6022)
- Optische Sensoren-reflektierende-Logik-Ausgang(194)
- Optische Sensoren - reflektierend - analoge Ausgang(432)
- Optische Sensoren-Phototransistoren(1027)
- Optische Sensoren - Photointerrupter - Schlitztyp - Transistorausgang(1427)
- Optische Sensoren - Photointerrupter - Schlitztyp - Logikausgabe(1215)
- Optische Sensoren-Lichtschranke, Industrial(16763)
- Optische Sensoren-Photodioden(1543)
- Optische Sensoren-Foto-Detektoren-Remote Receiver(2605)
- Optische Sensoren-Foto-Detektoren-Logik-Ausgang(146)
- Optische Sensoren-Foto-Detektoren-CDs-Zellen(74)
- Optische Sensoren-Distanz-Messung(377)
- Optische Sensoren-Ambient Light, IR, UV Sensoren(1305)
- Multifunktions(558)
- Motion Sensors-Vibration(337)
- Motion Sensors-Tilt Schalter(67)
- Bewegungsmelder-optisch(719)
- Motion Sensors-Neigungssensoren(175)
- Motion Sensors-Imus (Trägheit-Maßeinheiten)(416)
- Motion Sensors-Kreisel(214)
- Motion Sensors-Beschleunigungsmesser(1911)
- Magnete-Sensor abgestimmt(119)
- Magnete-Multi Purpose(1965)
- Magnetische Sensoren-Schalter (Solid State)(3700)
- Magnetsensoren - Position, Nähe, Geschwindigkeit (Module)(5199)
- Magnetische Sensoren-linear, Kompass (ICS)(1247)
- Magnetsensoren - Kompass, Magnetfeld (Module)(35)
- LVDT -Wandler (linearer variabler Differentialtransformator)(204)
- IrDA Transceiver-Module(196)
- Bildsensor, Kamera(2235)
- Feuchtigkeit-Sensoren(1425)
- Gas-Sensoren(1217)
- Force Sensoren(188)
- Durchfluss-Sensoren(550)
- Float, Level Sensoren(1343)
- Encoder(6357)
- Staub-Sensoren(43)
- Aktuelle Wandler(3455)
- Color Sensoren(85)
- Verstärker(1905)
Relevanter Hersteller







-
Anschlüsse, Verbindungen
Anschlüsse, Verbindungen
- USB, DVI, HDMI -Stecker(446)
- Festkörperbeleuchtungsstecker(555)
- Steckdosen für ICs, Transistoren(953)
- Steckbare Steckverbinder(1221)
- Photovoltaik (Solarpanel) Anschlüsse(136)
- Glasfaseranschlüsse(370)
- FFC, FPC (flache flexible) Anschlüsse(761)
- D-Sub, D-förmige Stecker(2887)
- Koaxialverbinder (RF)(2389)
- Rundanschlüsse(14162)
- Stromanbeter Blade Type(273)
- Stecker und Behälter(2597)
- USB, DVI, HDMI Stecker-Adapter(572)
- USB, DVI, HDMI -Stecker(4298)
- Klemmen-Wire to Board Steckverbinder(217)
- Klemmen-Draht-Steckverbinder(4322)
- Klemmen-Draht-Pin Stecker(328)
- Terminals-Revolver Steckverbinder(1273)
- Terminals-spezialisierte Steckverbinder(2042)
- Klemmen-Spaten Verbinder(3902)
- Klemmen-Löten/Stecker(345)
- Klemmen-Verschraubungen(745)
- Klemmen-Ring Steckverbinder(12596)
- Klemmen-rechteckige Steckverbinder(4747)
- Terminals - Schnellverbindungen, schnelle Trennungsanschlüsse(8514)
- Klemmen-PC PIN, Single Post Connectors(3776)
- Klemmen-PC-Pin-Buchsen, Sockel-Steckverbinder(5883)
- Klemmen-magnetische Draht-Steckverbinder(1653)
- Klemmen-Messer Steckverbinder(112)
- Klemmen-Gehäuse, Stiefel(2850)
- Klemmen-Folie Steckverbinder(108)
- Klemmen-Barrel, Bullet-Steckverbinder(1107)
- Klemmen-Adapter(137)
- Terminal-Streifen und Revolver-Boards(1159)
- Terminal Junction Systeme(2533)
- Anschlussblöcke-Draht an Bord(43615)
- Terminal Blocks-spezialisierte(3722)
- Terminal Blocks-Power Distribution(847)
- Anschlussblöcke-Panel Mount(1359)
- Terminal Blocks-Interface Module(1819)
- Anschlussblöcke-Kopfzeilen, Stecker und Buchsen(119920)
- Anschlussblöcke-DIN-Schiene, Kanal(9373)
- Anschlussblöcke-Kontakte(65)
- Anschlussblöcke-Barrier Blocks(47517)
- Anschlussblöcke-Adapter(1059)
- Solid State Lighting Verbinder-Kontakte(271)
- Festkörperbeleuchtungsstecker(1344)
- Buchsen für ICS, Transistoren-Adapter(275)
- Steckdosen für ICs, Transistoren(22148)
- Shunts, Jumper(907)
- Rechteckige Verbinder-Feder geladen(7721)
- Rechteckige Steckverbinder-Gehäuse(43023)
- Rechteckige Verbinder-Kopfzeilen, Spezial-PIN(6129)
- Rechteckige Anschlüsse - Header, Gefäße, weibliche Sockel(229601)
- Rechteckige Verbinder-Kopfzeilen, männliche Pins(543338)
- Rechteckige Anschlüsse - kostenloses Hängen, Panelhalterung(30142)
- Rechteckige Verbinder-Kontakte(10681)
- Rechteckige Anschlüsse - Board in, Direktdraht zum Board(2432)
- Rechteckige Verbinder-Adapter(475)
- Rechteckig - Brett zu Board -Steckern - Header, Behälter, weibliche Sockel(9)
- Rechteckig - Brett zu Board -Steckern - Header, männliche Stifte(2)
- Rechteckige Anschlüsse - Board -Abstandshalter, Stacker (Board zu Board)(238901)
- Rechteckige Anschlüsse - Arrays, Kantentyp, Mezzanin (Board zu Board)(37853)
- Stromanschluss-Eingänge, Steckdosen, Module(10310)
- Steckbare Steckverbinder(6049)
- Photovoltaik- (Solarpanel) Anschlüsse - Kontakte(77)
- Photovoltaik (Solarpanel) Anschlüsse(504)
- Modulare Steckverbinder-Verdrahtung Blöcke(99)
- Modulare Steckverbinder-Stecker(1674)
- Modulare Steckverbinder-Stecker Gehäuse(181)
- Modulare Steckverbinder-Buchsen mit magnetischen(10152)
- Modulare Steckverbinder-Buchsen(23416)
- Modulare Steckverbinder-Adapter(855)
- Memory Connectors-PC Cards-Adapter(21)
- Memory Connectors-PC Card Sockets(3299)
- Memory Connectors-Inline Modul Sockets(3390)
- LGH Steckverbinder(764)
- Keystone-Einsätze(2758)
- Keystone-Frontplatte, Frames(1926)
- Heavy Duty Steckverbinder-Einsätze, Module(4190)
- Schwerlastanschlüsse - Gehäuse, Kapuzen, Basen(17226)
- Heavy Duty Steckverbinder-Frames(523)
- Heavy Duty Steckverbinder-Kontakte(1832)
- Heavy Duty Steckverbinder-Baugruppen(671)
- LWL-Steckverbinder-Gehäuse(919)
- Glasfaser-Steckverbinder - Adapter(4455)
- LWL-Steckverbinder(3001)
- FFC, FPC (flache flexible) Steckverbinder - Gehäuse(652)
- FFC, FPC (flache flexible) Anschlüsse - Kontakte(202)
- FFC, FPC (flache flexible) Anschlüsse(18691)
- D-Sub, d-förmige Steckverbinder-Terminatoren(47)
- D-Sub, d-förmige Steckverbinder-Gehäuse(12238)
- D-Sub, d-förmige Steckverbinder-Kontakte(2714)
- D-Sub, D-förmige Steckverbinder-Rückenschalen, Kapuzen(5995)
- D-Sub, d-förmige Steckverbinder-Adapter(1304)
- D-Sub Steckverbinder(141346)
- D-förmige Steckverbinder-Centronics(8770)
- Kontakte, Frühling geladen und Druck(630)
- Kontakte-Multi Purpose(6196)
- Kontakte-"Leadframe"(122)
- Koaxial-Steckverbinder (RF)-Terminatoren(1231)
- Koaxial-Steckverbinder (RF)-Kontakte(480)
- Koaxial-Steckverbinder (RF)-Adapter(6386)
- Koaxialverbinder (RF)(25734)
- Rundsteckverbinder-Gehäuse(441226)
- Rundsteckverbinder-Kontakte(4737)
- Rundsteckverbinder-backschalen und Kabel-Klemmen(53692)
- Rundsteckverbinder-Adapter(8839)
- Rundanschlüsse(1196254)
- Card Edge Steckverbinder-Gehäuse(469)
- Karte Edge Verbinder-edgeboard Verbinder(672683)
- Card Edge Verbinder-Kontakte(325)
- Card Edge Verbinder-Adapter(73)
- Blade Type Power Steckverbinder-Gehäuse(837)
- Blade Type Power Connectors-Kontakte(393)
- Stromanbeter Blade Type(4163)
- Zwischen Serien-Adapter(649)
- Barrel-Stromanschluss(935)
- Barrel-Audio-Anschlüsse(2432)
- Barrel-Audio Adapter(92)
- Banana und Tip Steckverbinder-Buchsen, Stecker(1644)
- Banana and Tip Connectors-Binding Posts(239)
- Banana und Tip Steckverbinder-Adapter(75)
- Backplane Steckverbinder-spezialisiert(45586)
- Backplane Steckverbinder-Gehäuse(6863)
- Backplane Steckverbinder-Hard metrisch, Standard(6297)
- Backplane Steckverbinder-DIN 41612(9408)
- Backplane Steckverbinder-Kontakte(3583)
- Backplane Connectors-ARINC Einsätze(2357)
- Backplane Steckverbinder-ARINC(3789)
Relevanter Hersteller







-
Widerstände
-
Kondensatoren
Kondensatoren
- Aluminium-Elektrolytkondensatoren(16817)
- Trimmer, Variable Kondensatoren(3151)
- Dünne Folien-Kondensatoren(3473)
- Tantal-Kondensatoren(136103)
- Tantal-Polymer-Kondensatoren(9778)
- Silizium-Kondensatoren(320)
- Niob Oxide Kondensatoren(330)
- Mica und PTFE Kondensatoren(9101)
- Folien-Kondensatoren(150406)
- Elektrische Doppelschichtkondensatoren (EDLC), Superkondensatoren(2782)
- Keramische Kondensatoren(833829)
- Kondensatoren-Netzwerke, Arrays(2383)
- Aluminium-Elektrolytkondensatoren(125325)
- Aluminium-Polymer-Kondensatoren(7544)
Relevanter Hersteller






-
Transformatoren
Transformatoren
Relevanter Hersteller







-
Isolatoren
-
Kristalle, Oszillatoren, Resonatoren
Kristalle, Oszillatoren, Resonatoren
Relevanter Hersteller






-
Switches
Switches
- Verriegelungsschalter(2893)
- Emergency-Stop-Schalter (E-Stop)(1160)
- Kabelzugschalter(571)
- Toggle-Schalter(33608)
- Rändelrads Schalter(742)
- Schalter(14263)
- Snap-Aktion, Endschalter begrenzen(28077)
- Slide-Schalter(5166)
- Selector-Schalter(9720)
- Rotary Switches(13850)
- Rocker Schalter(53790)
- Drucktaste-Schalter-Hall-Effekt(127)
- Drucktaste Schalter(190826)
- Programmierbare Display-Switches(39)
- Navigations-Schalter, Joystick(1882)
- Magnetische, Reed-Schalter(1399)
- Keypad-Schalter(637)
- Keylock Schalter(3684)
- DIP Schalter(7747)
- Konfigurierbare Switch-Komponenten-Objektiv(1435)
- Konfigurierbare Schalter-Komponenten-Lichtquelle(1236)
- Konfigurierbare Switch-Komponenten-Contact Block(1401)
- Konfigurierbare Switch-Komponenten-Body(16077)
- Disconnect-Switch-Komponenten(2567)
Relevanter Hersteller






-
Relais
Relais
- Sicherheitsrelais(1310)
- Reedrelais(1735)
- Hochfrequenz (RF) -Relais(1190)
- Schütze (Festkörper)(686)
- Schütze (elektromechanisch)(11952)
- Kfz-Relais(1881)
- Solid State Relais(10652)
- Signal-Relais, bis zu 2 Ampere(9149)
- Relay-Sockets(2075)
- Power Relays, über 2 Ampere(31604)
- E / A-Relaismodule(712)
- I/o-Relay-Module-Input(2)
- I/o-Relay-Modul-Racks(247)
Relevanter Hersteller
















Sprache auswählen
Aktuelle Sprache
Deutsch
- English
- Deutsch
- Italia
- Français
- 日本語
- 한국의
- русский
- Svenska
- Nederland
- español
- Português
- polski
- Suomi
- Gaeilge
- Slovenská
- Slovenija
- Čeština
- Melayu
- Magyarország
- Hrvatska
- Dansk
- românesc
- Indonesia
- Ελλάδα
- Български език
- Afrikaans
- IsiXhosa
- isiZulu
- lietuvių
- Maori
- Kongeriket
- Монголулс
- O'zbek
- Tiếng Việt
- हिंदी
- اردو
- Kurdî
- Català
- Bosna
- Euskera
- العربية
- فارسی
- Corsa
- Chicheŵa
- עִבְרִית
- Latviešu
- Hausa
- Беларусь
- አማርኛ
- Republika e Shqipërisë
- Eesti Vabariik
- íslenska
- မြန်မာ
- Македонски
- Lëtzebuergesch
- საქართველო
- Cambodia
- Pilipino
- Azərbaycan
- ພາສາລາວ
- বাংলা ভাষার
- پښتو
- malaɡasʲ
- Кыргыз тили
- Ayiti
- Қазақша
- Samoa
- සිංහල
- ภาษาไทย
- Україна
- Kiswahili
- Cрпски
- Galego
- नेपाली
- Sesotho
- Тоҷикӣ
- Türk dili
- ગુજરાતી
- ಕನ್ನಡkannaḍa
- मराठी
Wie der HMC5883L Magnetometer in Kompass- und Navigationssystemen funktioniert
Zeit: 2026/06/5
Durchsuchen: 7
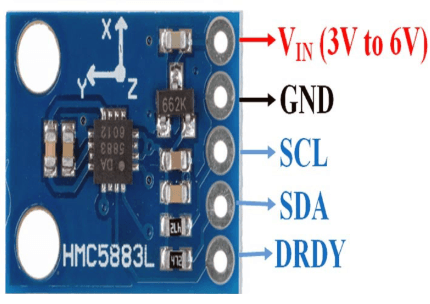
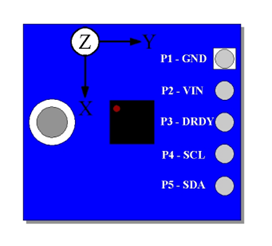
Der HMC5883L ist ein 3-Achsen digitaler Magnetometermodul, der verwendet wird, um die Magnetfeldstärke entlang der X-, Y- und Z-Achsen zu messen. Einfach gesagt funktioniert er wie ein elektronischer Kompass, der einem Gerät hilft, Richtung, Peilung und Orientierung zu erkennen. Dieser Artikel behandelt alles über die HMC5883L Pinbelegung, die Modulkomponenten, das Funktionsprinzip, die Spezifikationen, die Verkabelung, die Kompassrichtungen und mehr.

Katalog
HMC5883L Pinbelegung und Pinfunktionen
| Pin Name |
Beschreibung |
Funktion |
| VIN |
Stromversorgung Eingang |
Versorgt das Modul mit Strom, typischerweise von 3V bis 6V |
| GND |
Massepin |
Gemeinsame Masseverbindung für den Schaltkreis |
| SCL |
Serielle Taktleitung |
I2C-Taktsignal für die Kommunikation mit dem Mikrocontroller verwendet |
| SDA |
Serielle Datenleitung |
I2C-Datensignal zur Übertragung von Sensordaten verwendet |
| DRDY |
Datenbereit-Pin |
Zeigt an, wann neue Magnetometerdaten zum Lesen verfügbar sind |
HMC5883L Modulkomponenten
• HMC5883L Magnetometer-IC - Der Hauptsensorchip, der die Magnetfeldstärke entlang der X-, Y- und Z-Achsen misst.
• Spannungsregler - Ermöglicht dem Modul, höhere Eingangs- spannungen zu akzeptieren, typischerweise zwischen 3V und 6V.
• Pull-Up-Widerstände - Verwendet an den SDA- und SCL-Leitungen zur Unterstützung stabiler I2C-Kommunikation.
• Filterkondensatoren - Helfen, elektrische Störungen zu reduzieren und die Stromversorgung für genaue Sensorablesungen zu stabilisieren.
• I2C-Kommunikationsschnittstelle - Erleichtert die Kommunikation mit Arduino, ESP32, Raspberry Pi und anderen Mikrocontrollern.
• DRDY (Daten bereit) Schaltung - Gibt ein Signal aus, wenn frische Sensordaten verfügbar sind.
• PCB-Antennenähnliche Kupferleitungen - Entworfen, um Interferenzen zu minimieren und die Signalqualität des Moduls zu verbessern.
• Befestigungslöcher - Ermöglichen eine sichere Installation des Moduls in Robotik, Drohnen und eingebetteten Systemen.
• Achsenorientierungsmarkierungen (X, Y, Z) - Auf der PCB gedruckt, um die Richtung der Magnetfeldmessachsen zu zeigen.
Wie der HMC5883L Magnetometer funktioniert
Der HMC5883L-Magnetometer erkennt das Magnetfeld der Erde mit seinen drei Messachsen: X, Y und Z. Diese Achsen ermöglichen es dem Sensor, die Richtung und Stärke der Magnetfelder um das Modul herum zu erfassen. Wenn sich das Modul bewegt oder dreht, ändern sich auch die Magnetfeldwerte an jeder Achse.
Im Inneren des Sensors werden diese magnetischen Signale in digitale Daten umgewandelt, die ein Mikrocontroller über die I2C-Schnittstelle lesen kann. Dies ermöglicht es Platinen wie Arduino, ESP32 und Raspberry Pi, Echtzeit-Magnetfeldmessungen vom Modul zu empfangen.
Der HMC5883L zeigt von sich aus keine Kompassrichtungen an. Er liefert nur rohe Magnetfelddaten. Der Mikrocontroller muss diese Daten verarbeiten, um nützliche Richtungs- oder Kursinformationen zu berechnen. Da der Sensor empfindlich auf nahegelegene Magnete, Motoren, Metallteile und elektrische Störungen reagiert, sind eine korrekte Platzierung und Kalibrierung wichtig für stabile Messwerte.
Funktionen und technische Spezifikationen des HMC5883L
| Merkmal |
Zustand |
Spezifikation |
| Betriebsspannung |
Stromversorgungs-Eingang |
2,7 V bis 6,5 V DC |
| Kommunikationsschnittstelle |
Digitale Kommunikation |
I2C-Schnittstelle |
| I2C-Kommunikationsgeschwindigkeit |
Maximal unterstützte Taktfrequenz |
Bis zu 400 kHz |
| Betriebstemperatur |
Umgebungsbetriebsbereich |
-30 °C bis +85 °C |
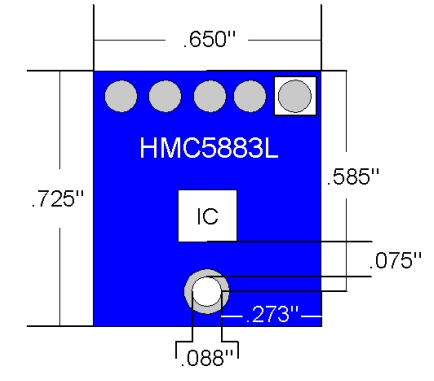
| Modulabmessungen |
PCB-Größe |
1,8 × 1,7 cm |
| Durchschnittlicher Stromverbrauch |
Leerlaufmodus |
2 µA typisch |
| Durchschnittlicher Stromverbrauch |
Messmodus |
100 µA typisch |
| Magnetfeldbereich |
Vollskala angewandtes Feld |
±8 Gauss |
| Magnetischer Dynamikbereich |
3-Bit Verstärkungssteuerung |
±1 bis ±8 Gauss |
| Auflösung |
VDD = 3,0 V, GN = 2 |
5 Milli-Gauss |
| Linearität |
±2,0 Gauss Eingangsbereich |
0,1 % FS Maximum |
| Hysterese |
±2,0 Gauss Eingangsbereich |
±25 ppm |
| Kreuzachsenempfindlichkeit |
Kreuzfeld = 0,5 Gauss, angewendet = ±3 Gauss |
±0,2 % FS/Gauss |
| Datenausgangsrate (ODR) |
Kontinuierlicher Messmodus |
0,75 Hz bis 75 Hz |
| Datenausgangsrate (ODR) |
Einzelmessungsmodus |
Bis zu 160 Hz |
| Messperiode |
Befehl zu Daten bereit |
6 ms typisch |
| Einschaltzeit |
Bereit für I2C-Befehle |
200 µs typisch |
| Verstärkungstoleranz |
Alle Verstärkungs-/Dynamikbereichseinstellungen |
±5 % |
| I2C-Adresse |
7-Bit-Adresse |
0x1E |
| I2C-Leseadresse |
8-Bit-Leseadresse |
0x3D |
| I2C-Schreibadresse |
8-Bit-Schreibadresse |
0x3C |
| I2C-Hysterese |
Fallenspielfeld (VDDIO = 1,8 V) |
0,2 × VDDIO |
| I2C-Hysterese |
Steigfeld (VDDIO = 1,8 V) |
0,8 × VDDIO |
| Richtungsdetektion |
Kompasskursmessung |
360° Richtungsabgleich |
| Ausgangsachsen |
Magnetfeldmessung |
X, Y, Z Achsen |
HMC5883L mit Arduino & Raspberry Pi
HMC5883L Magnetometer Verbindung mit Arduino UNO
Der HMC5883L kann mit dem Arduino UNO über die I2C-Kommunikationsschnittstelle verbunden werden. Das Modul verwendet nur vier Hauptanschlüsse: VCC, GND, SDA und SCL. Im Arduino UNO ist der SDA-Pin mit A4 verbunden, während der SCL-Pin mit A5 verbunden ist. Nachdem das Modul korrekt verkabelt wurde, kann der Arduino die X-, Y- und Z-Magnetfelddaten vom Sensor für digitale Kompass- und Orientierungsanwendungen lesen.
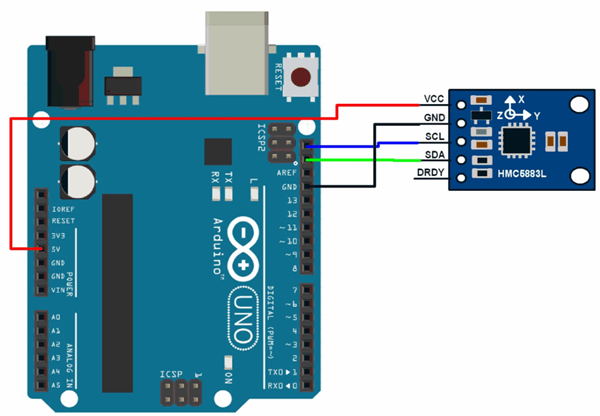
Das HMC5883L-Modul funktioniert normalerweise einwandfrei, wenn es über den 5V-Pin des Arduino UNO mit Strom versorgt wird, da die meisten Breakout-Boards einen integrierten Spannungsregler enthalten. Nach der Verbindung erhält der Arduino kontinuierlich Magnetfeldmessungen über den I2C-Bus zur Kursberechnung und Navigationsfunktionen.
Arduino UNO Verdrahtungsanschlüsse
| HMC5883L Pin |
Arduino UNO Pin |
| VCC |
5V |
| GND |
GND |
| SDA |
A4 |
| SCL |
A5 |
| DRDY |
Optional / Nicht erforderlich |
HMC5883L mit Raspberry Pi
Der HMC5883L kann auch mit dem Raspberry Pi über die I2C-Schnittstelle kommunizieren. Der Raspberry Pi verwendet GPIO2 für SDA und GPIO3 für SCL-Kommunikation. Dieses Setup ermöglicht es dem Raspberry Pi, Echtzeit-Magnetfelddaten für Navigation, Orientierungserkennung und Robotikanwendungen zu lesen.
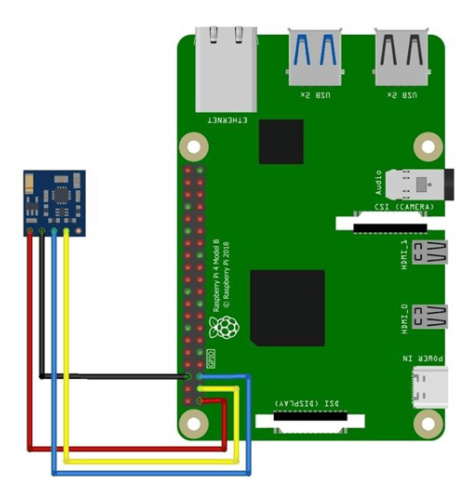
Im Gegensatz zum Arduino UNO arbeitet der Raspberry Pi mit 3,3V Logikpegeln, was den Betriebsanforderungen vieler HMC5883L Module entspricht. Nachdem die I2C-Schnittstelle in den Raspberry Pi-Einstellungen aktiviert wurde, kann das System den Sensor erkennen und beginnen, Kompassrichtungsdaten auszulesen.
Raspberry Pi Verdrahtungsverbindungen
| HMC5883L Pin |
Raspberry Pi Pin |
| VCC |
3,3V |
| GND |
GND |
| SDA |
GPIO2 (SDA) |
| SCL |
GPIO3 (SCL) |
| DRDY |
Optional / Nicht erforderlich |
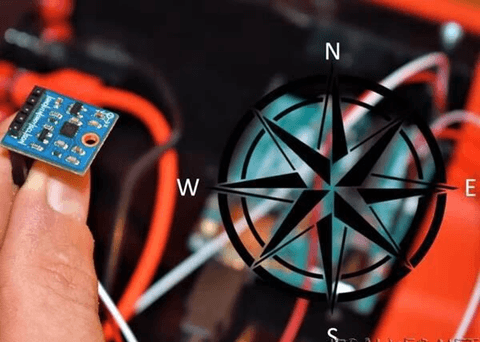
So lesen Sie die Kompassrichtung mit HMC5883L
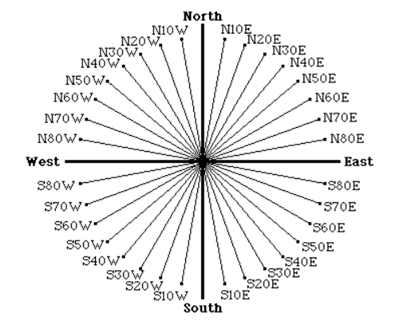
Um die Kompassrichtung mit dem HMC5883L zu lesen, verwendet der Mikrocontroller die Magnetfelddaten des Sensors und berechnet den Richtungswinkel. Für die grundlegende Kompassrichtung werden normalerweise die X- und Y-Achsenmessungen verwendet, da sie das horizontale Magnetfeld darstellen, wenn das Modul flach platziert wird.
Der Richtungswinkel wird üblicherweise mit der Arctan-Funktion berechnet:
θ = tan⁻¹(Y / X)
In dieser Formel ist X die Magnetfeldmessung auf der X-Achse, Y die Magnetfeldmessung auf der Y-Achse und θ der Kompassrichtungswinkel. Das berechnete Ergebnis wird normalerweise in Grad von 0° bis 360° umgewandelt.
Ein Winkel von 0° oder 360° bedeutet üblicherweise Nord, 90° bedeutet Ost, 180° bedeutet Süd und 270° bedeutet West. Für eine bessere Genauigkeit wenden einige Systeme auch eine Korrektur der magnetischen Deklination an, da magnetisches Nord und echtes Nord nicht immer identisch sind. Bei bewegten Geräten kann eine ordnungsgemäße Kalibrierung und Neigungscompensation auch die Genauigkeit der Kompassrichtung verbessern.
HMC5883L Modulkalibrierungsprozess
Die Kalibrierung ist ein wichtiger Schritt bei der Verwendung des HMC5883L Magnetometers, da nahegelegene magnetische Störungen die Genauigkeit des Kompasses beeinträchtigen können. Ohne ordnungsgemäße Kalibrierung kann der Sensor falsche Richtungen anzeigen, instabile Richtungswerte oder driftende Kompasswerte zeigen. Häufige Störquellen sind Motoren, Metallobjekte, Magneten, Batterien und elektrische Leitungen, die sich in der Nähe des Moduls befinden.
Der Kalibrierungsprozess des HMC5883L hilft, magnetische Verzerrungen zu entfernen und die Genauigkeit der Richtung zu verbessern. Zwei häufige Probleme, die die Messungen des Magnetometers beeinflussen, werden als Hart-Eisen-Verzerrung und Weich-Eisen-Verzerrung bezeichnet. Hart-Eisen-Verzerrung wird durch permanente magnetische Felder von nahegelegenen Magneten oder elektronischen Komponenten verursacht, während Weich-Eisen-Verzerrung auftritt, wenn nahegelegene Metallobjekte das umgebende Magnetfeld verbiegen oder verändern.
Eine der einfachsten Kalibriermethoden ist die Achtbewegungstechnik. Während dieses Prozesses wird der Sensor langsam in mehrere Richtungen gedreht, während er sich in einem Acht-Muster bewegt. Dies ermöglicht es dem HMC5883L, Magnetfelddaten aus verschiedenen Winkeln zu sammeln und Korrekturwerte für die X-, Y- und Z-Achsen zu berechnen.
Nach der Kalibrierung werden die Kompasswerte stabiler und genauer. Eine ordnungsgemäße Kalibrierung ist besonders wichtig in Drohnen, Robotern, Navigationssystemen und elektronischen Kompassanwendungen, wo zuverlässige Richtungsdaten erforderlich sind. Für die besten Ergebnisse sollte der Sensor auch von Motoren, Lautsprechern, Stromkabeln und großen Metallflächen entfernt platziert werden.
HMC5883L Modulneigungskompensation
Das HMC5883L Magnetometer kann die Kompassrichtung genau messen, wenn der Sensor flach und eben platziert ist. Wenn das Modul jedoch geneigt ist, ändern sich die Magnetfeldmessungen auf den X-, Y- und Z-Achsen, was zu falschen Richtungsberechnungen führen kann. Dieses Problem wird in beweglichen Systemen wie Drohnen, Robotern und tragbaren Navigationsgeräten deutlicher.
Die Neigungskompensation ist eine Technik zur Korrektur der Kompasswerte, wenn der Sensor nicht perfekt horizontal ist. Anstatt sich nur auf die Messungen der X- und Y-Achse zu verlassen, berücksichtigt das System auch den Neigungswinkel des Sensors. Dies hilft, genaue Richtungsinformationen aufrechtzuerhalten, selbst wenn das Gerät sich bewegt oder in verschiedene Richtungen rotiert.
In vielen Anwendungen wird das HMC5883L mit einem Beschleunigungsmesser oder Gyroskop kombiniert, um die Neigungskompensation durchzuführen. Der Beschleunigungsmesser misst den Neigungswinkel des Sensors, während das Magnetometer Daten zur Richtung des Magnetfelds bereitstellt. Das System kombiniert dann beide Messungen, um eine korrigierte Kompassrichtung zu berechnen.
Die Neigungskompensation ist in Drohnen, autonomen Robotern, Navigationssystemen für Flugzeuge und Bewegungsnachverfolgungsgeräten sehr wichtig, da diese Systeme während des Betriebs selten vollständig eben bleiben. Durch die Anwendung der Neigungskompensation kann das HMC5883L stabilere und zuverlässigere Richtungsmesswerte in realen Umgebungen bereitstellen.
Anwendungen von HMC5883L Magnetometer-Modulen
Digitale Kompasssysteme
Das HMC5883L-Modul wird häufig in digitalen Kompassanwendungen verwendet, um das Magnetfeld der Erde zu messen und die Richtung zu bestimmen. Es hilft Geräten, Norden, Süden, Osten und Westen genau zu identifizieren. Viele tragbare Navigationssysteme, Smartphones und tragbare GPS-Geräte verwenden Magnetometersensoren zur Richtungsbestimmung.
Drohnen- und UAV-Navigation
Drohnen und unbemannte Luftfahrzeuge (UAVs) verwenden das HMC5883L zur Orientierung und Flugstabilisierung. Der Sensor arbeitet zusammen mit Beschleunigungsmessern und Gyroskopen, um während des Flugs die richtige Richtung beizubehalten. Es hilft, autonome Navigation, Wegpunktverfolgung und die Genauigkeit der Flugkontrolle zu verbessern.
Robotik und autonome Fahrzeuge
Roboter verwenden HMC5883L-Module zur richtungsbezogenen Wahrnehmung und Bewegungssteuerung. Autonome Roboter können ihre Richtung bestimmen und präziser durch Umgebungen navigieren. Dies ist nützlich in Hindernisvermeidungssystemen, Lagerrobotern und intelligenten Lieferrobotern.
Verbesserung der GPS-Navigation
Das HMC5883L wird oft mit GPS-Modulen kombiniert, um Navigationssysteme zu verbessern. Während GPS Standortdaten bereitstellt, fügt das Magnetometer Echtzeit-Richtungsinformationen hinzu. Diese Kombination ermöglicht eine flüssigere Kartenorientierung und genauere Bewegungsverfolgung.
Smartphone- und Tablet-Orientierung
Viele mobile Geräte verwenden Magnetometersensoren für Kompassanwendungen und Bildschirmorientierungsfunktionen. Das HMC5883L kann Änderungen in der magnetischen Richtung erkennen, die Anwendungen wie Kartennavigation, Augmented Reality (AR) und Werkzeuge zur Verfolgung im Freien unterstützen.
Metalldetektion Systeme
Der Sensor kann magnetische Störungen erkennen, die durch nahegelegene metallische Objekte verursacht werden. Aufgrund dieser Fähigkeit werden HMC5883L-Module manchmal in grundlegenden Metalldetektion und magnetischen Objekterkennungssystemen verwendet.
Wetterstationen und Umweltüberwachung
Einige Wetterüberwachungssysteme verwenden Magnetometer, um Variationen des Magnetfelds und Umweltbedingungen zu studieren. Forscher und Hobbyisten können das HMC5883L in Datenprotokollierungssysteme für wissenschaftliche Experimente und Überwachungsprojekte integrieren.
Bildungs- und DIY-Elektronikprojekte
Das HMC5883L ist in Arduino-, ESP32- und Raspberry-Pi-Projekten aufgrund seiner einfachen I2C-Kommunikationsschnittstelle beliebt. Studenten, Hobbyisten und Ingenieure verwenden es häufig, um das Interfacing mit Sensoren, die Entwicklung von Kompassen und das Design eingebetteter Systeme zu lernen.
Industrielle Positionierung und Bewegungsverfolgung
Industrielle Automatisierungssysteme können HMC5883L-Module für Bewegungsverfolgung und Positionierungsanwendungen verwenden. Der Sensor hilft, die Ausrichtungsorientierung, die Rotationsbewegung und Richtungsänderungen in Maschinen und automatisierten Systemen zu überwachen.
HMC5883L vs QMC5883L: Sind sie ähnlich?
Das HMC5883L und QMC5883L sind nicht genau dasselbe, aber beide sind 3-Achsen-Digital-Magnetometersensoren, die für Kompass- und Magnetfeldmessungen verwendet werden.
Das HMC5883L ist der ursprüngliche Honeywell-Sensor und ist normalerweise stabiler, aber heute schwerer zu finden. Es verwendet normalerweise die I2C-Adresse 0x1E. Der QMC5883L ist ein häufiger Ersatz, der in vielen kostengünstigen Modulen zu finden ist. Er verwendet eine andere Registerkarte und hat normalerweise die I2C-Adresse 0x0D, sodass HMC5883L-Bibliotheken möglicherweise nicht damit funktionieren.
Kurz gesagt, sie erfüllen ähnliche Aufgaben, sind aber in der Hardwarekommunikation und den Softwarebibliotheken nicht vollständig kompatibel.
HMC5883L vs alternative Module
| Merkmale |
HMC5883L |
MPU9250 |
MPU6050 |
BNO055 |
LSM9DS1 |
| Sensortyp |
Magnetometer nur |
9-Achsen-IMU |
6-Achsen-IMU |
9-Achsen-IMU |
9-Achsen-IMU |
| Beschleunigungsmesser |
Nein |
Ja |
Ja |
Ja |
Ja |
| Gyroskop |
Nein |
Ja |
Ja |
Ja |
Ja |
| Magnetometer |
Ja |
Ja |
Nein |
Ja |
Ja |
| Achsenunterstützung |
3-Achsen |
9-Achsen |
6-Achsen |
9-Achsen |
9-Achsen |
| Kompassfunktion |
Ja |
Ja |
Nein |
Ja |
Ja |
| Bewegungsverfolgung |
Eingeschränkt |
Ausgezeichnet |
Gut |
Ausgezeichnet |
Ausgezeichnet |
| Orientierungserkennung |
Grundlegende Richtung nur |
Volle Orientierungssverfolgung |
Nur Bewegung |
Volle Orientierungssverfolgung |
Volle Orientierungssverfolgung |
| Sensorsfusion |
Nein |
Externe Verarbeitung erforderlich |
Externe Verarbeitung erforderlich |
Eingebauter Sensorfusion |
Externe Verarbeitung erforderlich |
| Kommunikationsschnittstelle |
I2C |
I2C / SPI |
I2C |
I2C / UART |
I2C / SPI |
| Energieverbrauch |
Niedrig |
Mäßig |
Niedrig |
Mäßig |
Niedrig |
| Komplexität |
Einfach |
Fortgeschritten |
Mäßig |
Einfach zu bedienen |
Fortgeschritten |
| Genauigkeit |
Gute Kompassgenauigkeit |
Hohe Bewegungs- und Orientierung Genauigkeit |
Gute Bewegungssensorik |
Sehr hohe Orientierung Genauigkeit |
Hohe Genauigkeit |
| Häufige Anwendungen |
Digitaler Kompass, Navigation |
Drohnen, Robotik, VR |
Bewegungssensorik, balancierende Roboter |
Robotik, AR/VR, Orientierungssysteme |
Industrielle und tragbare Geräte |
| Kosten |
Niedrig |
Mäßig |
Niedrig |
Höher |
Mäßig |
| Am besten geeignet für |
Kompassprojekte |
Vollständige Bewegungsverfolgungssysteme |
Grundlegende Bewegungssensorik |
Einfache Orientierungstracking |
Hochleistungs-IMU-Anwendungen |
HMC5883L mechanische Abmessungen
Fazit
Der HMC5883L ist ein nützliches Magnetometer-Modul für Projekte, die eine Richtungsbestimmung, einen Kompasskurs oder eine Messung des Magnetfelds benötigen. Es ist einfach zu verbinden, verbraucht wenig Strom und ist geeignet für Arduino, Raspberry Pi, Robotik, Drohnen, GPS-Navigation und DIY-Elektronikprojekte. Allerdings hängen genaue Ergebnisse von der richtigen Verdrahtung, der korrekten Kalibrierung und einer sorgfältigen Platzierung fern von Magneten, Motoren, Metallobjekten und elektromagnetischem Rauschen ab. HMC5883L ist eine praktische Wahl für grundlegende digitale Kompass- und Orientierungsanwendungen, aber Sie sollten auch seine Grenzen verstehen und ihn mit QMC5883L, MPU9250 und anderen IMU-Sensoren vergleichen, bevor Sie das richtige Modul auswählen.
Häufig gestellte Fragen [FAQ]
1. Warum benötigt der HMC5883L eine Kalibrierung, bevor genaue Kompassmessungen erreicht werden können?
Der HMC5883L ist empfindlich gegenüber magnetischen Störungen durch Motoren, Metallobjekte, Batterien und elektrische Verdrahtungen. Diese nahegelegenen Objekte können das Erdmagnetfeld verzerren und falsche Kurswerte verursachen. Die Kalibrierung hilft, harte Eisen- und weiche Eisenverzerrungen zu beseitigen, wodurch die Kompasswerte stabiler und genauer werden.
2. Warum ist die Neigungskompensation wichtig, wenn der HMC5883L in Drohnen und Robotern verwendet wird?
Wenn der Sensor geneigt wird, ändern sich die X-, Y- und Z-Messwerte, was falsche Kompassrichtungen erzeugen kann. Die Neigungskompensation kombiniert Magnetometerdaten mit Beschleunigungsmesser- oder Gyroskopmessungen, um eine genaue Richtungsbestimmung aufrechtzuerhalten, selbst während sich das Gerät bewegt oder dreht.
3. Was verursacht instabile oder driftende Kompasswerte in HMC5883L-Modulen?
Kompassdrift wird häufig durch schlechte Kalibrierung, nahe magnetische Störungen, eine falsche Sensorplatzierung oder elektrisches Rauschen verursacht. Motoren, Lautsprecher, Stromkabel und Metalloberflächen, die in der Nähe des Moduls platziert werden, können die Magnetfeldmessungen beeinträchtigen und die Kursgenauigkeit verringern.
4. Warum können einige HMC5883L Arduino-Bibliotheken nicht mit bestimmten Modulen kommunizieren?
Viele kostengünstige Module, die als HMC5883L verkauft werden, verwenden tatsächlich den QMC5883L-Sensor. Obwohl beide Sensoren ähnliche Funktionen ausführen, verwenden sie unterschiedliche I2C-Adressen und Registerkarten. Aus diesem Grund funktionieren Bibliotheken, die für den HMC5883L entwickelt wurden, möglicherweise nicht korrekt mit QMC5883L-Modulen.
5. Wie bestimmt der HMC5883L die Kompassrichtung anhand von Magnetfelddaten?
Der Sensor misst die Magnetfeldstärke entlang der X-, Y- und Z-Achsen. Der Mikrocontroller verwendet hauptsächlich die Werte der X- und Y-Achsen und wendet mathematische Berechnungen unter Verwendung der Arkustangensfunktion an, um den Kurswinkel relativ zum magnetischen Norden zu bestimmen.
6. Wie vereinfacht die I2C-Kommunikation die Integration des HMC5883L mit Mikrocontrollern?
Der HMC5883L verwendet die I2C-Schnittstelle, die nur SDA- und SCL-Kommunikationsleitungen benötigt. Dies ermöglicht eine einfache Verbindung mit Arduino, ESP32, Raspberry Pi und anderen Controllern, während die Verdrahtungs-Komplexität reduziert und GPIO-Pins gespart werden.
Verwandter Artikel
-
![HT12E Encoder-IC für RF-Wireless-Kommunikation]() Jun 05 2026
Jun 05 2026 -
![HCPL3120 Optokoppler-Gatetreiber für MOSFET- und IGBT-Schaltungen]() Jun 05 2026
Jun 05 2026


Verwandte -Produkte

C1005JB1H471K050BA
CAP CER 470PF 50V JB 0402

GRM1885C1H221GA01J
CAP CER 220PF 50V C0G/NP0 0603
06031A560KAT2A
CAP CER 56PF 100V NP0 0603

T494C106K020AT
CAP TANT 10UF 10% 20V 2312

F931A227MNC
CAP TANT 220UF 20% 10V 2917

ICS527R-01T
IC FANOUT BUFFER 28QSOP

74LCXP16245MTD
IC TXRX NON-INVERT 3.6V 48TSSOP

BA33BC0FP-E2
IC REG LINEAR 3.3V 1A TO252-3

LSISASX36-A1/62067B2-008
LSISASX36-A1/62067B2-008 LSI

TPS23525PWT
IC HOT SWAP CTRLR -48V 16TSSOP

EPS4640LC-20
EPS4640LC-20 ALTERA

TMV0505D

AM79Q021
AMD QFP-44