Alle Kategorien
-
Integrierte schaltkreise (ICS)
Integrierte schaltkreise (ICS)
- Schnittstelle - Sensor, kapazitive Berührung(642)
- Spezialisierte ICS(12302)
- PMIC-Spannungsregler-besonderer Zweck(5644)
- PMIC-Spannungsregler-lineare Regler(793)
- PMIC-Spannungsregler-linear + Switching(1829)
- PMIC-Spannungsregler-linear(70981)
- PMIC-Spannungsregler-DC DC Switching Regulators(39569)
- PMIC-Regler-DC-DC-Switching-Controller(13507)
- PMIC-Spannungs-Referenz(9453)
- PMIC-v/f und f/v-Wandler(145)
- PMIC-Thermal Management(592)
- PMIC-Supervisor(47946)
- PMIC-RMS bis DC-Wandler(170)
- PMIC-Netzteil-Controller, Monitore(2104)
- PMIC-Power over Ethernet (PoE) Controller(1008)
- PMIC-Power Management-spezialisierte(7722)
- PMIC-Netzschalter, Treiber laden(7706)
- PMIC-PFC (Power Factor Correction)(1222)
- PMIC oder Steuerungen, ideale Dioden(705)
- PMIC-Motor-Treiber, Regler(4712)
- PMIC-Beleuchtung, Ballast-Regler(560)
- PMIC-LED-Treiber(7282)
- PMIC-Laser-Treiber(573)
- PMIC-Hot-Swap-Controller(2816)
- PMIC-Gate-Treiber(7083)
- PMIC-voll, Half-Bridge-Treiber(1342)
- PMIC-Energy Messung(654)
- PMIC-Display-Treiber(1435)
- PMIC-derzeitige Regulierung/Management(1481)
- PMIC-Batterie-Management(5553)
- PMIC-Ladegeräte(3831)
- PMIC-AC DC Konverter, Offline Schalter(4905)
- Memory-Controller(358)
- Memory-Konfigurations-Proms für FPGAs(639)
- Speicher-Akkus(13)
- Erinnerung(65694)
- Logic-universelle Bus-Funktionen(706)
- Logic-Übersetzer, Level-Shifter(2854)
- Logik-Specialty Logic(1870)
- Logik-Signal-Schalter, Multiplexer, Decoder(9420)
- Logic-Shift-Register(2665)
- Logic-Parity Generatoren und Checkers(335)
- Logic-multivibratoren(831)
- Logik-Latches(3658)
- Logik - Tore und Wechselrichter - Multifunktion, konfigurierbar(1687)
- Logik-Tore und Wechselrichter(16453)
- Logic-Flip Flops(7780)
- Logik-FIFOs Speicher(4240)
- Logik-Zähler, Trennlinien(3456)
- Logik-Vergleichsoperator(592)
- Logik-Puffer, Treiber, Receiver, Transceiver(17835)
- Linear-Video-Verarbeitung(2909)
- Linear-Vergleichsoperator(5084)
- Linear-analoge Multiplikatoren, Trennwände(263)
- Linear-Verstärker-Video Amps und Module(1905)
- Linear-Verstärker-Spezial-Zweck(1856)
- Linear - Verstärker - Instrumentierung, OP -Verstärker, Pufferverstärker(34236)
- Linear-Verstärker-Audio(4567)
- Interface-Voice Record und Playback(556)
- Schnittstelle - UARTs (Universal Asynchronous Receivers -Sender)(1236)
- Schnittstelle-Telecom(4467)
- Interface-spezialisierte(4833)
- Interface-Signal Terminatoren(333)
- Interface-Signal-Puffer, Repeater, Splitter(1449)
- Interface-Serializer, Deserializer(1480)
- Schnittstellen-Sensor und Detektor-Interfaces(1524)
- Interface-Module(169)
- Interface-Modems-ICS und Module(407)
- Interface-e/a-Expander(1136)
- Interface-Filter-aktiv(1226)
- Interface-Encoder, Decoder, Konverter(714)
- Interface-Treiber, Receiver, Transceiver(20755)
- Interface-Direct Digital Synthesis (DDS)(117)
- Interface-Controller(3628)
- Interface-Codecs(1676)
- Schnittstelle - Analoge Switches, Multiplexer, Demultiplexer(12567)
- Schnittstelle-analoge Schalter-spezieller Zweck(2533)
- Embedded-System on Chip (SoC)(4496)
- Embedded-PLDs (programmierbare Logik-Vorrichtung)(971)
- Embedded-Mikroprozessoren(10083)
- Embedded-Mikrocontroller-anwendungsspezifische(2275)
- Embedded-Mikrocontroller(99285)
- Eingebettet - Mikrocontroller, Mikroprozessor, FPGA -Module(1527)
- Eingebettet - FPGAs (Feldprogrammiergate -Array) mit Mikrocontrollern(81)
- Embedded-FPGAs (Field Programmable Gate Array)(27748)
- Embedded-DSP (Digital Signal Processors)(4081)
- Eingebettet - CPLDs (komplexe programmierbare Logikgeräte)(5187)
- Datenerfassung-Touch Screen Controller(1210)
- Datenerfassung-Digital to Analog Converter (DAC)(14419)
- Datenerfassung-digitale Potentiometer(6250)
- Datenerfassung-analog zu Digital Converters (ADC)(17776)
- Datenerfassung-analoges Frontend (AFE)(787)
- Datenerfassung-MDE/DACs-spezieller Zweck(3043)
- Clock/Timing-Uhren in Echtzeit(2446)
- Uhr/Timing - programmierbare Timer und Oszillatoren(23469)
- Clock/Timing-IC-Akkus(4)
- Takt/Timing-Delay Lines(1049)
- Uhr/Timing - Uhrengeneratoren, PLLS, Frequenzsynthesizer(32775)
- Clock/Timing-Clock Puffer, Treiber(4568)
- Clock/Timing-anwendungsspezifische(8652)
- Audio Spezial-Zweck(1564)
Relevanter Hersteller







-
Diskrete Halbleiter-Produkte
Diskrete Halbleiter-Produkte
- Aktuelle Regulierung - Dioden, Transistoren(1090)
- Transistoren-besonderer Zweck(226)
- Transistoren-programmierbare Unijunction(48)
- Transistoren-jfets(1558)
- Transistoren-IGBTs-Einzel(4799)
- Transistoren-IGBTs-Module(63420)
- Transistoren-IGBTs-Arrays(26)
- Transistoren-FETs, MOSFETs-Einzel(48330)
- Transistoren-FETs, MOSFETs-RF(4903)
- Transistoren-FETs, MOSFETs-Arrays(6641)
- Transistoren-Bipolar (BJT)-einzeln, Pre-biased(4539)
- Transistoren-Bipolar (BJT)-Einzel(25800)
- Transistoren-Bipolar (BJT)-RF(2087)
- Transistoren-bipolare (BJT)-Arrays, Pre-biased(2115)
- Transistoren-bipolare (BJT)-Arrays(2310)
- Thyristor-triacs(4044)
- Thyristoren-SCRs-Module(3967)
- Thyristoren-SCRs(5436)
- Thyristoren-diacs, sidacs(319)
- Power Driver Module(1627)
- Dioden-zenerdioden-Einzel(87483)
- Dioden-zenerdioden-Arrays(2619)
- Dioden - variable Kapazität (Varik, Varaktoren)(1200)
- Dioden-RF(2753)
- Dioden-Gleichrichter-Einzel(67528)
- Dioden-Gleichrichter-Arrays(20581)
- Dioden-Brücke-Gleichrichter(11700)
Relevanter Hersteller




-
RF/if und RFID
RF/if und RFID
- SIM -Karten für Abonnenten -Identifikationsmodul (SIM)(77)
- RF -Zirkulatoren und Isolatoren(1742)
- RFID, RF-Zugang, Monitoring-ICS(1550)
- RFID Transponder, Tags(747)
- RFID Lesegeräte(464)
- RFID -Bewertungs- und Entwicklungskits, Boards(30)
- RFID Antennen(329)
- RFI und EMI - Abschirm- und Absorbungsmaterialien(6444)
- HF und EMI-Kontakte, Fingerstock und Dichtungen(7497)
- RF Transmitter(668)
- RF Transceiver Module(6900)
- RF-Transceiver ICS(4169)
- HF-Schalter(9276)
- RF Shields(16401)
- HF-Receiver(1998)
- HF -Empfänger, Sender und Transceiver -Einheiten(2763)
- RF Power Divider/Splitter(1223)
- RF Power Controller ICs(86)
- HF-Modulatoren(710)
- HF-Mixer(2800)
- RF misc ICS und Module(3276)
- HF-Front-End (LNA + PA)(419)
- RF -Bewertungs- und Entwicklungskits, Boards(747)
- HF-gerichtete Kupplung(2718)
- RF Diplexer(1464)
- RF-Detektoren(412)
- RF-Demodulatoren(249)
- HF-Antennen(12319)
- HF-Verstärker(19651)
- Balun(1496)
- Dämpfungsglieder(4852)
Relevanter Hersteller







-
Optoelektronik
Optoelektronik
- Optomechanisch(480)
- Leuchten(125)
- Laserdioden, Lasermodule - Laserlieferung, Laserfasern(345)
- Hene Lasersysteme(31)
- Hene Laserköpfe(27)
- Hintergrundbeleuchtung anzeigen(93)
- Xenon-Beleuchtung(387)
- Touchscreen-Overlays(453)
- Panel Indicators, Pilot Lights(75729)
- Optik-Remote-Phosphor-Lichtquelle(269)
- Optik-Reflektoren(665)
- Optik-leichte Rohre(5384)
- Optik-Objektive(4951)
- LEDs-Spacer, Unentschieden(2718)
- LEDs-Lamp-Ersetzungen(29718)
- LEDs - Leiterplattenindikatoren, Arrays, Lichtstäbe, Balkendiagramme(9083)
- LED-thermische Produkte(667)
- LED-Beleuchtung(64)
- LED-Beleuchtung-weiß(37580)
- LED-Beleuchtung-Farbe(4728)
- LED-Beleuchtung-Maiskolben, Motoren, Module(28735)
- LED-Anzeige-diskret(27601)
- Laserdioden, Module(1553)
- Lampen-Glühlampen, Neons(311004)
- Lampen-Kälte-Fluoreszenz (KKL) & UV(164)
- Wechselrichter(7728)
- Infrarot, UV, sichtbare Strahler(3871)
- Fiber Optics-Transmitter-Antrieb integriert(4085)
- Fiber Optics-Transmitter-diskrete(350)
- Fiber Optics-Transceiver Module(18758)
- Fiberoptik-Switches, Multiplexer, Demultiplexer(1387)
- Fiberoptik-Receiver(695)
- Fiberoptik-Dämpfung(654)
- Elektrolumineszenz(102)
- Display, Monitor-Interface Controller(98)
- Display-Module-Vakuum-Leuchtstofflampen (VFD)(249)
- Module anzeigen-LED Dot Matrix und Cluster(865)
- Display-Module-LED-Zeichen und numerische(5421)
- Display-Module-LCD, OLED, Graphic(4654)
- Display-Module-LCD, OLED-Zeichen und numerische(2202)
- Display-Blenden, Objektive(88)
- Adresse, Spezialität(458)
Relevanter Hersteller







-
Sensoren, Wandler
Sensoren, Wandler
- Ultraschallempfänger, Sender - Industrial(115)
- Temperatursensoren - Thermostate - Mechanisch - Industrielles(3103)
- Temperatursensoren - Analog und digitaler Ausgang - Industrial(209)
- Näherungssensoren - Industrial(13611)
- Drucksensoren, Wandler - Industrie(26503)
- Optische Sensoren - Photonik - Zähler, Detektoren, SPCM (Einzelphotonzählmodul)(751)
- Optische Sensoren - Kameramodule(875)
- Magnetsensoren - Position, Nähe, Geschwindigkeit (Module) - Industrie(554)
- Kraftsensoren - Industrial(346)
- Flusssensoren - Industrielles(151)
- Float, Level Sensoren - Industrial(310)
- Encoder - Industrial(4980)
- Farbsensoren - Industrial(50)
- Berührungssensoren(100)
- Ultraschall-Receiver, Transmitter(2421)
- Temperatursensoren-Thermostat-Solid State(1096)
- Temperatursensoren-Thermostate-mechanisch(3397)
- Temperatursensoren - Thermoelemente, Temperatursonden(1921)
- Temperatursensoren - RTD (Widerstandstemperaturdetektor)(1525)
- Temperatursensoren-PTC-Thermistoren(2273)
- Temperatursensoren-ntc-thermistoren(13259)
- Temperatursensoren-Analog und Digital Output(3928)
- DMS(1399)
- Spezialisierte Sensoren(1861)
- Solarzellen(503)
- Schock-Sensoren(84)
- Sensor-Interface-Junction-Blöcke(2519)
- Sensor-Kabel-Baugruppen(22011)
- Proximity/Belegung Sensoren-fertige Einheiten(725)
- Näherungsschalter(2860)
- Drucksensoren, Wandler(11317)
- Positionssensoren - Winkel, lineare Positionsmessung(6022)
- Optische Sensoren-reflektierende-Logik-Ausgang(194)
- Optische Sensoren - reflektierend - analoge Ausgang(432)
- Optische Sensoren-Phototransistoren(1027)
- Optische Sensoren - Photointerrupter - Schlitztyp - Transistorausgang(1427)
- Optische Sensoren - Photointerrupter - Schlitztyp - Logikausgabe(1215)
- Optische Sensoren-Lichtschranke, Industrial(16763)
- Optische Sensoren-Photodioden(1543)
- Optische Sensoren-Foto-Detektoren-Remote Receiver(2605)
- Optische Sensoren-Foto-Detektoren-Logik-Ausgang(146)
- Optische Sensoren-Foto-Detektoren-CDs-Zellen(74)
- Optische Sensoren-Distanz-Messung(377)
- Optische Sensoren-Ambient Light, IR, UV Sensoren(1305)
- Multifunktions(558)
- Motion Sensors-Vibration(337)
- Motion Sensors-Tilt Schalter(67)
- Bewegungsmelder-optisch(719)
- Motion Sensors-Neigungssensoren(175)
- Motion Sensors-Imus (Trägheit-Maßeinheiten)(416)
- Motion Sensors-Kreisel(214)
- Motion Sensors-Beschleunigungsmesser(1911)
- Magnete-Sensor abgestimmt(119)
- Magnete-Multi Purpose(1965)
- Magnetische Sensoren-Schalter (Solid State)(3700)
- Magnetsensoren - Position, Nähe, Geschwindigkeit (Module)(5199)
- Magnetische Sensoren-linear, Kompass (ICS)(1247)
- Magnetsensoren - Kompass, Magnetfeld (Module)(35)
- LVDT -Wandler (linearer variabler Differentialtransformator)(204)
- IrDA Transceiver-Module(196)
- Bildsensor, Kamera(2235)
- Feuchtigkeit-Sensoren(1425)
- Gas-Sensoren(1217)
- Force Sensoren(188)
- Durchfluss-Sensoren(550)
- Float, Level Sensoren(1343)
- Encoder(6357)
- Staub-Sensoren(43)
- Aktuelle Wandler(3455)
- Color Sensoren(85)
- Verstärker(1905)
Relevanter Hersteller







-
Anschlüsse, Verbindungen
Anschlüsse, Verbindungen
- USB, DVI, HDMI -Stecker(446)
- Festkörperbeleuchtungsstecker(555)
- Steckdosen für ICs, Transistoren(953)
- Steckbare Steckverbinder(1221)
- Photovoltaik (Solarpanel) Anschlüsse(136)
- Glasfaseranschlüsse(370)
- FFC, FPC (flache flexible) Anschlüsse(761)
- D-Sub, D-förmige Stecker(2887)
- Koaxialverbinder (RF)(2389)
- Rundanschlüsse(14162)
- Stromanbeter Blade Type(273)
- Stecker und Behälter(2597)
- USB, DVI, HDMI Stecker-Adapter(572)
- USB, DVI, HDMI -Stecker(4298)
- Klemmen-Wire to Board Steckverbinder(217)
- Klemmen-Draht-Steckverbinder(4322)
- Klemmen-Draht-Pin Stecker(328)
- Terminals-Revolver Steckverbinder(1273)
- Terminals-spezialisierte Steckverbinder(2042)
- Klemmen-Spaten Verbinder(3902)
- Klemmen-Löten/Stecker(345)
- Klemmen-Verschraubungen(745)
- Klemmen-Ring Steckverbinder(12596)
- Klemmen-rechteckige Steckverbinder(4747)
- Terminals - Schnellverbindungen, schnelle Trennungsanschlüsse(8514)
- Klemmen-PC PIN, Single Post Connectors(3776)
- Klemmen-PC-Pin-Buchsen, Sockel-Steckverbinder(5883)
- Klemmen-magnetische Draht-Steckverbinder(1653)
- Klemmen-Messer Steckverbinder(112)
- Klemmen-Gehäuse, Stiefel(2850)
- Klemmen-Folie Steckverbinder(108)
- Klemmen-Barrel, Bullet-Steckverbinder(1107)
- Klemmen-Adapter(137)
- Terminal-Streifen und Revolver-Boards(1159)
- Terminal Junction Systeme(2533)
- Anschlussblöcke-Draht an Bord(43615)
- Terminal Blocks-spezialisierte(3722)
- Terminal Blocks-Power Distribution(847)
- Anschlussblöcke-Panel Mount(1359)
- Terminal Blocks-Interface Module(1819)
- Anschlussblöcke-Kopfzeilen, Stecker und Buchsen(119920)
- Anschlussblöcke-DIN-Schiene, Kanal(9373)
- Anschlussblöcke-Kontakte(65)
- Anschlussblöcke-Barrier Blocks(47517)
- Anschlussblöcke-Adapter(1059)
- Solid State Lighting Verbinder-Kontakte(271)
- Festkörperbeleuchtungsstecker(1344)
- Buchsen für ICS, Transistoren-Adapter(275)
- Steckdosen für ICs, Transistoren(22148)
- Shunts, Jumper(907)
- Rechteckige Verbinder-Feder geladen(7721)
- Rechteckige Steckverbinder-Gehäuse(43023)
- Rechteckige Verbinder-Kopfzeilen, Spezial-PIN(6129)
- Rechteckige Anschlüsse - Header, Gefäße, weibliche Sockel(229601)
- Rechteckige Verbinder-Kopfzeilen, männliche Pins(543338)
- Rechteckige Anschlüsse - kostenloses Hängen, Panelhalterung(30142)
- Rechteckige Verbinder-Kontakte(10681)
- Rechteckige Anschlüsse - Board in, Direktdraht zum Board(2432)
- Rechteckige Verbinder-Adapter(475)
- Rechteckig - Brett zu Board -Steckern - Header, Behälter, weibliche Sockel(9)
- Rechteckig - Brett zu Board -Steckern - Header, männliche Stifte(2)
- Rechteckige Anschlüsse - Board -Abstandshalter, Stacker (Board zu Board)(238901)
- Rechteckige Anschlüsse - Arrays, Kantentyp, Mezzanin (Board zu Board)(37853)
- Stromanschluss-Eingänge, Steckdosen, Module(10310)
- Steckbare Steckverbinder(6049)
- Photovoltaik- (Solarpanel) Anschlüsse - Kontakte(77)
- Photovoltaik (Solarpanel) Anschlüsse(504)
- Modulare Steckverbinder-Verdrahtung Blöcke(99)
- Modulare Steckverbinder-Stecker(1674)
- Modulare Steckverbinder-Stecker Gehäuse(181)
- Modulare Steckverbinder-Buchsen mit magnetischen(10152)
- Modulare Steckverbinder-Buchsen(23416)
- Modulare Steckverbinder-Adapter(855)
- Memory Connectors-PC Cards-Adapter(21)
- Memory Connectors-PC Card Sockets(3299)
- Memory Connectors-Inline Modul Sockets(3390)
- LGH Steckverbinder(764)
- Keystone-Einsätze(2758)
- Keystone-Frontplatte, Frames(1926)
- Heavy Duty Steckverbinder-Einsätze, Module(4190)
- Schwerlastanschlüsse - Gehäuse, Kapuzen, Basen(17226)
- Heavy Duty Steckverbinder-Frames(523)
- Heavy Duty Steckverbinder-Kontakte(1832)
- Heavy Duty Steckverbinder-Baugruppen(671)
- LWL-Steckverbinder-Gehäuse(919)
- Glasfaser-Steckverbinder - Adapter(4455)
- LWL-Steckverbinder(3001)
- FFC, FPC (flache flexible) Steckverbinder - Gehäuse(652)
- FFC, FPC (flache flexible) Anschlüsse - Kontakte(202)
- FFC, FPC (flache flexible) Anschlüsse(18691)
- D-Sub, d-förmige Steckverbinder-Terminatoren(47)
- D-Sub, d-förmige Steckverbinder-Gehäuse(12238)
- D-Sub, d-förmige Steckverbinder-Kontakte(2714)
- D-Sub, D-förmige Steckverbinder-Rückenschalen, Kapuzen(5995)
- D-Sub, d-förmige Steckverbinder-Adapter(1304)
- D-Sub Steckverbinder(141346)
- D-förmige Steckverbinder-Centronics(8770)
- Kontakte, Frühling geladen und Druck(630)
- Kontakte-Multi Purpose(6196)
- Kontakte-"Leadframe"(122)
- Koaxial-Steckverbinder (RF)-Terminatoren(1231)
- Koaxial-Steckverbinder (RF)-Kontakte(480)
- Koaxial-Steckverbinder (RF)-Adapter(6386)
- Koaxialverbinder (RF)(25734)
- Rundsteckverbinder-Gehäuse(441226)
- Rundsteckverbinder-Kontakte(4737)
- Rundsteckverbinder-backschalen und Kabel-Klemmen(53692)
- Rundsteckverbinder-Adapter(8839)
- Rundanschlüsse(1196254)
- Card Edge Steckverbinder-Gehäuse(469)
- Karte Edge Verbinder-edgeboard Verbinder(672683)
- Card Edge Verbinder-Kontakte(325)
- Card Edge Verbinder-Adapter(73)
- Blade Type Power Steckverbinder-Gehäuse(837)
- Blade Type Power Connectors-Kontakte(393)
- Stromanbeter Blade Type(4163)
- Zwischen Serien-Adapter(649)
- Barrel-Stromanschluss(935)
- Barrel-Audio-Anschlüsse(2432)
- Barrel-Audio Adapter(92)
- Banana und Tip Steckverbinder-Buchsen, Stecker(1644)
- Banana and Tip Connectors-Binding Posts(239)
- Banana und Tip Steckverbinder-Adapter(75)
- Backplane Steckverbinder-spezialisiert(45586)
- Backplane Steckverbinder-Gehäuse(6863)
- Backplane Steckverbinder-Hard metrisch, Standard(6297)
- Backplane Steckverbinder-DIN 41612(9408)
- Backplane Steckverbinder-Kontakte(3583)
- Backplane Connectors-ARINC Einsätze(2357)
- Backplane Steckverbinder-ARINC(3789)
Relevanter Hersteller







-
Widerstände
-
Kondensatoren
Kondensatoren
- Aluminium-Elektrolytkondensatoren(16817)
- Trimmer, Variable Kondensatoren(3151)
- Dünne Folien-Kondensatoren(3473)
- Tantal-Kondensatoren(136103)
- Tantal-Polymer-Kondensatoren(9778)
- Silizium-Kondensatoren(320)
- Niob Oxide Kondensatoren(330)
- Mica und PTFE Kondensatoren(9101)
- Folien-Kondensatoren(150406)
- Elektrische Doppelschichtkondensatoren (EDLC), Superkondensatoren(2782)
- Keramische Kondensatoren(833829)
- Kondensatoren-Netzwerke, Arrays(2383)
- Aluminium-Elektrolytkondensatoren(125325)
- Aluminium-Polymer-Kondensatoren(7544)
Relevanter Hersteller






-
Transformatoren
Transformatoren
Relevanter Hersteller







-
Isolatoren
-
Kristalle, Oszillatoren, Resonatoren
Kristalle, Oszillatoren, Resonatoren
Relevanter Hersteller






-
Switches
Switches
- Verriegelungsschalter(2893)
- Emergency-Stop-Schalter (E-Stop)(1160)
- Kabelzugschalter(571)
- Toggle-Schalter(33608)
- Rändelrads Schalter(742)
- Schalter(14263)
- Snap-Aktion, Endschalter begrenzen(28077)
- Slide-Schalter(5166)
- Selector-Schalter(9720)
- Rotary Switches(13850)
- Rocker Schalter(53790)
- Drucktaste-Schalter-Hall-Effekt(127)
- Drucktaste Schalter(190826)
- Programmierbare Display-Switches(39)
- Navigations-Schalter, Joystick(1882)
- Magnetische, Reed-Schalter(1399)
- Keypad-Schalter(637)
- Keylock Schalter(3684)
- DIP Schalter(7747)
- Konfigurierbare Switch-Komponenten-Objektiv(1435)
- Konfigurierbare Schalter-Komponenten-Lichtquelle(1236)
- Konfigurierbare Switch-Komponenten-Contact Block(1401)
- Konfigurierbare Switch-Komponenten-Body(16077)
- Disconnect-Switch-Komponenten(2567)
Relevanter Hersteller






-
Relais
Relais
- Sicherheitsrelais(1310)
- Reedrelais(1735)
- Hochfrequenz (RF) -Relais(1190)
- Schütze (Festkörper)(686)
- Schütze (elektromechanisch)(11952)
- Kfz-Relais(1881)
- Solid State Relais(10652)
- Signal-Relais, bis zu 2 Ampere(9149)
- Relay-Sockets(2075)
- Power Relays, über 2 Ampere(31604)
- E / A-Relaismodule(712)
- I/o-Relay-Module-Input(2)
- I/o-Relay-Modul-Racks(247)
Relevanter Hersteller
















Sprache auswählen
Aktuelle Sprache
Deutsch
- English
- Deutsch
- Italia
- Français
- 日本語
- 한국의
- русский
- Svenska
- Nederland
- español
- Português
- polski
- Suomi
- Gaeilge
- Slovenská
- Slovenija
- Čeština
- Melayu
- Magyarország
- Hrvatska
- Dansk
- românesc
- Indonesia
- Ελλάδα
- Български език
- Afrikaans
- IsiXhosa
- isiZulu
- lietuvių
- Maori
- Kongeriket
- Монголулс
- O'zbek
- Tiếng Việt
- हिंदी
- اردو
- Kurdî
- Català
- Bosna
- Euskera
- العربية
- فارسی
- Corsa
- Chicheŵa
- עִבְרִית
- Latviešu
- Hausa
- Беларусь
- አማርኛ
- Republika e Shqipërisë
- Eesti Vabariik
- íslenska
- မြန်မာ
- Македонски
- Lëtzebuergesch
- საქართველო
- Cambodia
- Pilipino
- Azərbaycan
- ພາສາລາວ
- বাংলা ভাষার
- پښتو
- malaɡasʲ
- Кыргыз тили
- Ayiti
- Қазақша
- Samoa
- සිංහල
- ภาษาไทย
- Україна
- Kiswahili
- Cрпски
- Galego
- नेपाली
- Sesotho
- Тоҷикӣ
- Türk dili
- ગુજરાતી
- ಕನ್ನಡkannaḍa
- मराठी
Schema und Funktionsprinzip des Kraftsensors FSR400
Zeit: 2026/02/5
Durchsuchen: 244
Der Kraftsensor FSR400 ist ein kompakter, flexibler Kraftmesswiderstand, der den ausgeübten Druck durch Widerstandsänderungen in ein messbares elektrisches Signal umwandelt.In diesem Artikel werden die schematische Funktionsweise des FSR400-Kraftsensors, die typische Kraftkurve, Details zur Pinbelegung, äquivalente Modelle, Spezifikationen und mehr erläutert.

Katalog
Übersicht über den Kraftsensor FSR400
Der Kraftsensor FSR400 ist ein dünner und flexibler Kraftmesswiderstand, der Druckänderungen durch Schwankungen des elektrischen Widerstands erkennen soll.Wenn Kraft auf die Oberfläche ausgeübt wird, verringert sich der Widerstand, sodass elektronische Systeme die Berührungs- oder Druckintensität auf einfache und effektive Weise messen können.
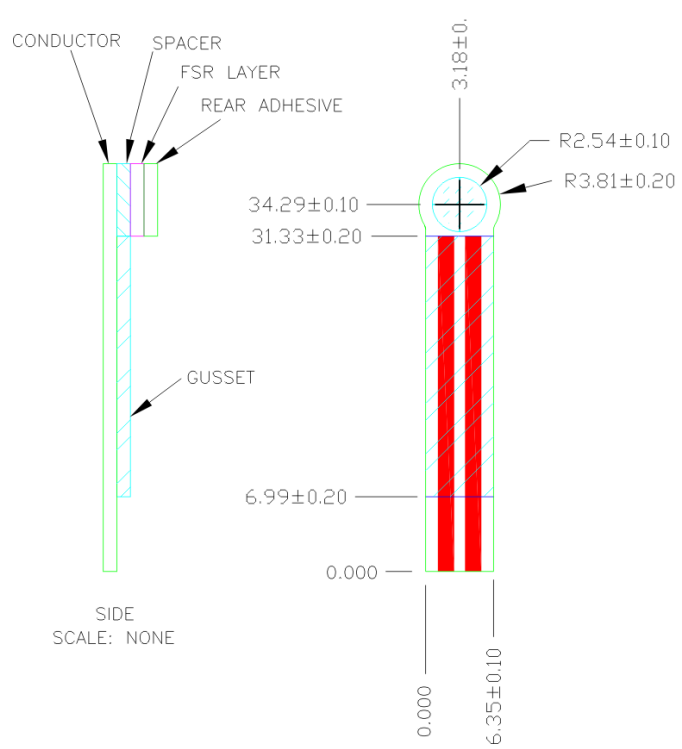
Der FSR400 basiert auf der Polymer-Dickfilm-Technologie (PTF) und ist leicht, langlebig und für den wiederholten Einsatz geeignet.Es handelt sich um einen Einzonensensor mit einem kompakten runden Erfassungsbereich von 7,62 mm Durchmesser.Dieses Design erleichtert die Integration in Geräte mit begrenztem Platzangebot und sorgt gleichzeitig für eine zuverlässige Kraftreaktion.
Der von Interlink Electronics entwickelte FSR400 kann auch in verschiedenen Größen, Schwanzlängen und Anschlussoptionen angepasst werden, um spezifische Designanforderungen zu erfüllen.
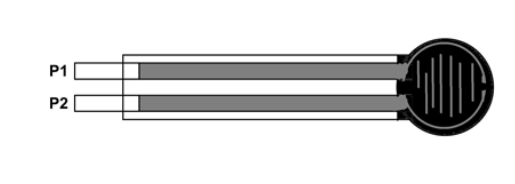
Details zur Pinbelegung des Kraftsensors FSR400
|
Pin
Etikett |
Pin
Name |
Beschreibung |
|
P1 |
Terminal 1 |
Ein Ende des
kraftempfindliches Widerstandselement.Wird entweder als Eingabe oder Ausgabe in a verwendet
Spannungsteiler oder Widerstandsmessschaltung. |
|
P2 |
Terminal 2 |
Das andere Ende von
das kraftempfindliche Widerstandselement.Wird mit Masse oder Referenz verbunden
Spannung abhängig vom Schaltungsaufbau. |
FSR400-Alternativen und gleichwertige Modelle
• FSR402
• FSR404
• FSR406
• FSR408
• FSR410
• FSR412
• FSR414
• FSR416
• FSR418
• FSR420
Schematische Darstellung des Kraftsensors FSR400
Das Schema zeigt den Kraftsensor FSR400 in einer einfachen Spannungsteiler- und Signalpufferkonfiguration.Der FSR ist zwischen der Versorgungsspannung (V+) und einem Festwiderstand (RM) angeschlossen, der nach Masse geht.Zusammen bilden FSR und RM einen Spannungsteiler, bei dem sich die Mittelpunktspannung basierend auf der auf den Sensor ausgeübten Kraft ändert.
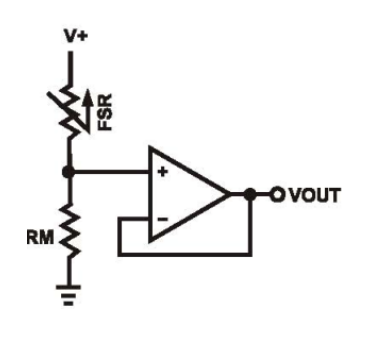
Wenn keine oder nur geringe Kraft ausgeübt wird, hat das FSR einen hohen Widerstand, was zu einer niedrigeren Spannung am Teilerknoten führt.Mit zunehmender Kraft nimmt der Widerstand des FSR ab, wodurch die Spannung in der Mitte ansteigt.Diese variierende Spannung stellt die ausgeübte Kraft in elektrischer Form dar.
Der Operationsverstärker ist als Spannungsfolger (Puffer) konfiguriert, dessen Ausgang direkt mit dem invertierenden Eingang verbunden ist.Dieser Aufbau verstärkt das Signal nicht, bietet aber einen stabilen Ausgang (VOUT) mit niedriger Ausgangsimpedanz.Dadurch kann die kraftabhängige Spannung sicher von einem ADC oder einer Steuerschaltung gelesen werden, ohne das Sensorverhalten zu belasten oder zu beeinflussen.
FSR400 Typische Kraftkurve
Die typische Kraftkurve des FSR400 zeigt die Beziehung zwischen der ausgeübten Kraft und dem Sensorwiderstand auf einer logarithmischen Skala.Wenn die auf den Sensor ausgeübte Kraft zunimmt, nimmt der Widerstand zunächst schnell und dann allmählich ab.Dieses nichtlineare Verhalten ist charakteristisch für Kraftmesswiderstände und zeigt, dass der Sensor bei niedrigeren Kraftniveaus empfindlicher ist.
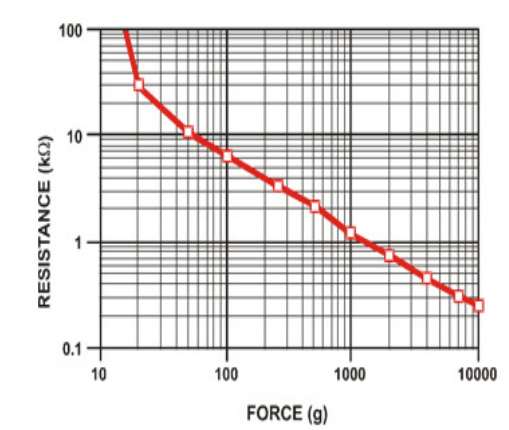
Bei geringen Kräften führt ein kleiner Druckanstieg zu einem starken Abfall des Widerstands, wodurch der FSR400 effektiv Berührungen und Eingaben mit geringer Kraft erkennt.Wenn die Kraft weiter zunimmt, verlangsamt sich die Geschwindigkeit der Widerstandsänderung, was auf eine verringerte Empfindlichkeit bei höheren Belastungen hinweist.Dies bedeutet, dass der Sensor eher für die relative Kraftmessung als für die präzise Gewichtsmessung geeignet ist.
Spezifikationen des Kraftsensors FSR400
|
Parameter |
Wert |
Notizen |
|
Betätigungskraft |
0,1 N (typisch)
|
Mindestkraft zu
Ausgabe produzieren |
|
Kraft
Empfindlichkeitsbereich |
0,1 N bis 100 N |
Typisch
Betätigungskraftbereich |
|
Auflösung erzwingen |
Kontinuierlich |
Analoge Kraft
Antwort |
|
Kraft
Wiederholbarkeit (Einzelteil) |
±2 % |
Gleicher Sensor,
wiederholte Tests |
|
Kraft
Wiederholbarkeit (Teil-zu-Teil) |
±6 % |
Sensor zu Sensor
Variation |
|
Nicht betätigt
Widerstand |
~10 MΩ |
Keine angewandte Kraft |
|
Abstand
Widerstand |
>10 MΩ |
Unbeladen, ungebeugt |
|
Widerstand unter
Laden |
~100 kΩ bis 1 kΩ |
Hängt davon ab
angewandte Kraft |
|
Sensordurchmesser |
7,62 mm |
Kreisförmige Erfassung
Bereich |
|
Dickenbereich |
0,2 mm bis 1,25
mm |
Hängt davon ab
Bau |
|
Reisen wechseln |
~0,05 mm |
Typisches Design
abhängig |
|
Hysterese |
+10 % |
(RF+ − RF−) /
RF+ |
|
Anstiegszeit des Geräts |
< 3 µs |
Gemessen mit
Stahlkugel |
|
Langfristige Drift |
<5 % pro
log₁₀(Zeit) |
35-Tage-Test, 1
kg Belastung |
|
Betrieb
Temperatur (empfohlen) |
−30 °C bis +70 °C |
Erweiterte Reichweite
bis zu −40 °C bis +85 °C |
|
Betriebsdauer |
≥10 Millionen
Betätigungen |
Getestet ohne
Misserfolg |
Merkmale des Kraftsensors FSR400
• Geringe Betätigungskraft – Erkennt Kräfte bereits ab 0,1 N und eignet sich daher für die Erkennung leichter Berührungen.
• Großer Kraftempfindlichkeitsbereich – Reagiert über einen breiten Kraftbereich und ermöglicht flexible Krafterkennungsstufen.
• Hohe Wiederholbarkeit – Bietet konsistente Kraftmesswerte mit einer Wiederholgenauigkeit von nur ±2 % unter kontrollierten Bedingungen.
• Anpassbare Größenoptionen – Erhältlich in verschiedenen Größen und Formen, passend zu verschiedenen mechanischen Designs.
• Ultradünnes Profil – Die dünne Bauweise (ca. 0,35 mm) ermöglicht eine einfache Integration in kompakte Baugruppen.
• Hohe Haltbarkeit – Entwickelt, um bis zu 10 Millionen Betätigungen ohne Leistungseinbußen standzuhalten.
• Kostengünstige Lösung – Bietet zuverlässige Kraftmessung bei niedrigen Gesamtsystemkosten.
• Einfache Integration – Das einfache Design mit zwei Anschlüssen ermöglicht den einfachen Anschluss an Standardschaltkreise.
So nutzen Sie den Kraftsensor FSR400
Der Kraftsensor FSR400 fungiert als variabler Widerstand, dessen Widerstand sich als Reaktion auf den ausgeübten Druck ändert.Wenn keine Kraft ausgeübt wird, ist der Widerstand des Sensors sehr hoch und mit zunehmendem Druck sinkt sein Widerstand.Da die meisten elektronischen Systeme die Spannung und nicht den Widerstand direkt messen, wird der Sensor üblicherweise in einer Spannungsteilerschaltung verwendet, um diese Widerstandsänderung in ein messbares Spannungssignal umzuwandeln.
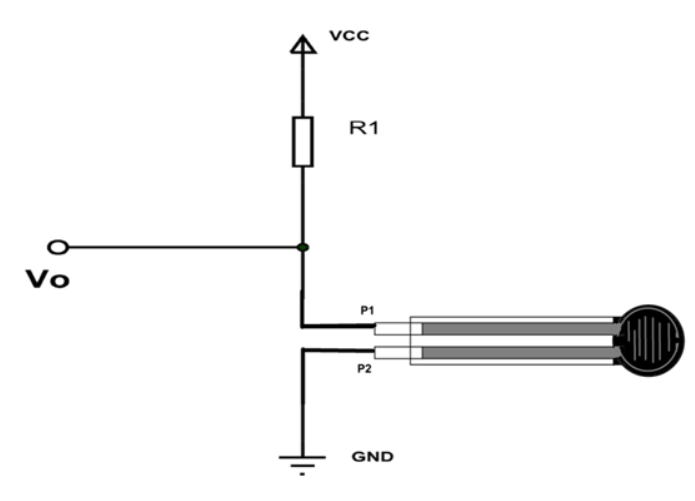
Im Schaltplan ist der FSR400 in Reihe mit einem Festwiderstand (R1) zwischen der Versorgungsspannung (VCC) und Masse geschaltet.Die Ausgangsspannung (Vo) wird vom Verbindungspunkt zwischen R1 und dem FSR abgenommen.Diese Mittelpunktspannung hängt vom Verhältnis zwischen dem Festwiderstand und dem Widerstand des Sensors ab.Wenn der Sensor nicht gedrückt wird, bleibt Vo aufgrund seines hohen Widerstands relativ hoch.Wenn Kraft ausgeübt wird und der Sensorwiderstand abnimmt, sinkt die Spannung an Vo entsprechend.
Diese variierende Ausgangsspannung stellt die ausgeübte Kraft dar und kann direkt in einen Analog-Digital-Wandler (ADC) eines Mikrocontrollers eingespeist werden.Durch die Überwachung von Vo-Änderungen kann das System verschiedene auf den FSR400 ausgeübte Druckniveaus zuverlässig erkennen und vergleichen.
Schnittstelle zum Kraftsensor FSR400 mit Arduino
Das Diagramm zeigt, wie der FSR400-Kraftsensor mithilfe eines einfachen Spannungsteileraufbaus an ein Arduino angeschlossen wird.Ein Anschluss des FSR400 ist mit der 5-V-Versorgung des Arduino verbunden, während der andere Anschluss mit einem festen Widerstand verbunden ist, der auf Masse geht.Diese Anordnung wandelt den sich ändernden Widerstand des Sensors in eine sich ändernde Spannung um.
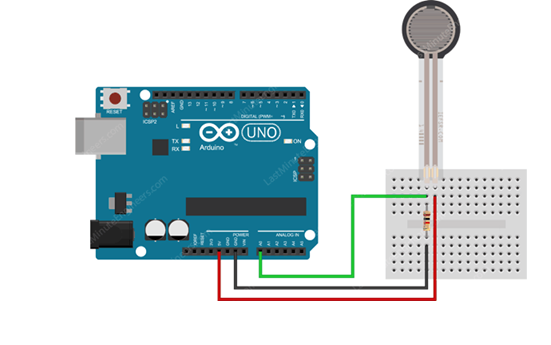
Die Verbindung zwischen dem FSR400 und dem Festwiderstand ist mit einem der analogen Eingangspins des Arduino verbunden.Wenn keine Kraft ausgeübt wird, hat der Sensor einen hohen Widerstand, was zu einer höheren Spannung am Analogpin führt.Wenn Druck auf den Sensor ausgeübt wird, verringert sich sein Widerstand, wodurch die Spannung am Analogeingang abfällt.
Der Arduino liest diese sich ändernde Spannung mithilfe seines Analog-Digital-Wandlers (ADC) und wandelt sie in einen numerischen Wert um.Dieser Wert kann dann im Code verwendet werden, um Berührungen zu erkennen, die relative Kraft zu messen oder Aktionen basierend auf den auf den FSR400 ausgeübten Druckniveaus auszulösen.
FSR400-Kraftsensoranwendungen
• Berührungsempfindliche Tasten
• Druckempfindliche Schalter
• Mensch-Maschine-Schnittstellensteuerungen
• Robotik-Force-Feedback
• Griffkrafterkennung
• Berührungseingaben für medizinische Geräte
• Tragbare Elektronik
• Industrielle Schalttafeln
• Eingangserkennung in der Unterhaltungselektronik
• Last- und Kontakterkennung
Mechanische Abmessungen
Fazit
Der Kraftsensor FSR400 eignet sich zur Erkennung von Berührungs- und Relativkräften in elektronischen Systemen.Durch den Betrieb als variabler Widerstand können Druckänderungen mithilfe einfacher Spannungsteilerschaltungen problemlos in Spannungssignale umgewandelt und von Mikrocontrollern wie Arduino gelesen werden.Aufgrund seiner nichtlinearen Kraftreaktion, hohen Haltbarkeit und kompakten Größe eignet es sich gut für Mensch-Maschine-Schnittstellen, Robotik, medizinische Geräte und Unterhaltungselektronik.
Häufig gestellte Fragen [FAQ]
1. Wie wählt man den richtigen Widerstandswert für einen FSR400-Spannungsteiler?
Wählen Sie einen Widerstand nahe dem Widerstand des Sensors in Ihrem Zielkraftbereich, um die Empfindlichkeit und ADC-Auflösung zu maximieren.
2. Kann der FSR400 für genauere Kraftmessungen kalibriert werden?
Ja.Verwenden Sie eine Mehrpunktkalibrierung mit bekannten Lasten und wenden Sie Kurvenanpassungen oder Nachschlagetabellen an, um die Genauigkeit zu verbessern.
3. Ist der FSR400 zur exakten Gewichtsmessung geeignet?
Nein. Aufgrund seiner nichtlinearen Reaktion und Hysterese eignet es sich am besten für die Erkennung relativer Kräfte oder Berührungen.
4. Welche ADC-Auflösung wird empfohlen, wenn FSR400 mit Mikrocontrollern verwendet wird?
Ein 10–12-Bit-ADC funktioniert gut;Eine höhere Auflösung verbessert die Empfindlichkeit bei geringen Kräften.
5. Wie können Sie das Rauschen bei FSR400-Messungen reduzieren?
Verwenden Sie einen Puffer-Operationsverstärker, eine stabile Stromversorgung, Mittelwertbildung in der Software und eine ordnungsgemäße Erdung.
6. Beeinflusst die Temperatur die Leistung des FSR400?
Ja.Die Temperatur kann zu Drift führen;Für den präzisen Einsatz kann eine Kompensation oder Neukalibrierung erforderlich sein.
7. Wie sollte der FSR400 mechanisch montiert werden, um optimale Ergebnisse zu erzielen?
Wenden Sie die Kraft gleichmäßig mit einer nachgiebigen Auflage an, um Punktbelastungen zu vermeiden und die Wiederholbarkeit zu verbessern.
Verwandter Artikel
-
![Was ist ein Flex-Sensor und wie funktioniert er?]() Feb 05 2026Was ist ein Flex-Sensor und wie funktioniert er?
Feb 05 2026Was ist ein Flex-Sensor und wie funktioniert er?Die flexible Struktur und der widerstandsbasierte Betrieb des Flex-Sensors ermöglichen die Umwandlung physikalischer Bewegungen in elektrische Signal... -
![GY-BMP280-Modulhandbuch zu Pinbelegung, Spezifikationen und Anwendungen]() Feb 04 2026GY-BMP280-Modulhandbuch zu Pinbelegung, Spezifikationen und Anwendungen
Feb 04 2026GY-BMP280-Modulhandbuch zu Pinbelegung, Spezifikationen und AnwendungenDie genaue Messung des atmosphärischen Drucks und der Temperatur ist in vielen modernen elektronischen Systemen unerlässlich, von der Umweltüberwac...

Verwandte -Produkte

08052A331FAT2A
CAP CER 330PF 200V NP0 0805

C1005X7R1E472M
CAP CER 4700PF 25V X7R 0402

GRM1556S1H3R5CZ01D
CAP CER 3.5PF 50V S2H 0402

TR3B686K6R3C0500
CAP TANT 68UF 10% 6.3V 1411

TAP105K035CCS
CAP TANT 1UF 10% 35V RADIAL

LM7805S/NOPB
IC REG LIN 5V 1.5A DDPAK/TO263-3

MC9S12P96VFT
IC MCU 16BIT 96KB FLASH 48QFN

VI-J6R-EX
DC DC CONVERTER 7.5V 75W

Z0221524AEC
Z0221524AEC ZILOG

T495C476M006ATE300
CAP TANT 47UF 20% 6.3V 2312

IDT89HA0324APSZG
IDT89HA0324APSZG IDT

7MBR50SB-120
FUJI New
XCAU25P-2FFVB676E
IC FPGA ARTIX UP 676FCBGA