Alle Kategorien
-
Integrierte schaltkreise (ICS)
Integrierte schaltkreise (ICS)
- Schnittstelle - Sensor, kapazitive Berührung(642)
- Spezialisierte ICS(12302)
- PMIC-Spannungsregler-besonderer Zweck(5644)
- PMIC-Spannungsregler-lineare Regler(793)
- PMIC-Spannungsregler-linear + Switching(1829)
- PMIC-Spannungsregler-linear(70981)
- PMIC-Spannungsregler-DC DC Switching Regulators(39569)
- PMIC-Regler-DC-DC-Switching-Controller(13507)
- PMIC-Spannungs-Referenz(9453)
- PMIC-v/f und f/v-Wandler(145)
- PMIC-Thermal Management(592)
- PMIC-Supervisor(47946)
- PMIC-RMS bis DC-Wandler(170)
- PMIC-Netzteil-Controller, Monitore(2104)
- PMIC-Power over Ethernet (PoE) Controller(1008)
- PMIC-Power Management-spezialisierte(7722)
- PMIC-Netzschalter, Treiber laden(7706)
- PMIC-PFC (Power Factor Correction)(1222)
- PMIC oder Steuerungen, ideale Dioden(705)
- PMIC-Motor-Treiber, Regler(4712)
- PMIC-Beleuchtung, Ballast-Regler(560)
- PMIC-LED-Treiber(7282)
- PMIC-Laser-Treiber(573)
- PMIC-Hot-Swap-Controller(2816)
- PMIC-Gate-Treiber(7083)
- PMIC-voll, Half-Bridge-Treiber(1342)
- PMIC-Energy Messung(654)
- PMIC-Display-Treiber(1435)
- PMIC-derzeitige Regulierung/Management(1481)
- PMIC-Batterie-Management(5553)
- PMIC-Ladegeräte(3831)
- PMIC-AC DC Konverter, Offline Schalter(4905)
- Memory-Controller(358)
- Memory-Konfigurations-Proms für FPGAs(639)
- Speicher-Akkus(13)
- Erinnerung(65694)
- Logic-universelle Bus-Funktionen(706)
- Logic-Übersetzer, Level-Shifter(2854)
- Logik-Specialty Logic(1870)
- Logik-Signal-Schalter, Multiplexer, Decoder(9420)
- Logic-Shift-Register(2665)
- Logic-Parity Generatoren und Checkers(335)
- Logic-multivibratoren(831)
- Logik-Latches(3658)
- Logik - Tore und Wechselrichter - Multifunktion, konfigurierbar(1687)
- Logik-Tore und Wechselrichter(16453)
- Logic-Flip Flops(7780)
- Logik-FIFOs Speicher(4240)
- Logik-Zähler, Trennlinien(3456)
- Logik-Vergleichsoperator(592)
- Logik-Puffer, Treiber, Receiver, Transceiver(17835)
- Linear-Video-Verarbeitung(2909)
- Linear-Vergleichsoperator(5084)
- Linear-analoge Multiplikatoren, Trennwände(263)
- Linear-Verstärker-Video Amps und Module(1905)
- Linear-Verstärker-Spezial-Zweck(1856)
- Linear - Verstärker - Instrumentierung, OP -Verstärker, Pufferverstärker(34236)
- Linear-Verstärker-Audio(4567)
- Interface-Voice Record und Playback(556)
- Schnittstelle - UARTs (Universal Asynchronous Receivers -Sender)(1237)
- Schnittstelle-Telecom(4467)
- Interface-spezialisierte(4833)
- Interface-Signal Terminatoren(333)
- Interface-Signal-Puffer, Repeater, Splitter(1449)
- Interface-Serializer, Deserializer(1480)
- Schnittstellen-Sensor und Detektor-Interfaces(1524)
- Interface-Module(169)
- Interface-Modems-ICS und Module(407)
- Interface-e/a-Expander(1136)
- Interface-Filter-aktiv(1226)
- Interface-Encoder, Decoder, Konverter(714)
- Interface-Treiber, Receiver, Transceiver(20755)
- Interface-Direct Digital Synthesis (DDS)(117)
- Interface-Controller(3628)
- Interface-Codecs(1676)
- Schnittstelle - Analoge Switches, Multiplexer, Demultiplexer(12567)
- Schnittstelle-analoge Schalter-spezieller Zweck(2533)
- Embedded-System on Chip (SoC)(4496)
- Embedded-PLDs (programmierbare Logik-Vorrichtung)(971)
- Embedded-Mikroprozessoren(10083)
- Embedded-Mikrocontroller-anwendungsspezifische(2275)
- Embedded-Mikrocontroller(99285)
- Eingebettet - Mikrocontroller, Mikroprozessor, FPGA -Module(1527)
- Eingebettet - FPGAs (Feldprogrammiergate -Array) mit Mikrocontrollern(81)
- Embedded-FPGAs (Field Programmable Gate Array)(27747)
- Embedded-DSP (Digital Signal Processors)(4081)
- Eingebettet - CPLDs (komplexe programmierbare Logikgeräte)(5187)
- Datenerfassung-Touch Screen Controller(1210)
- Datenerfassung-Digital to Analog Converter (DAC)(14419)
- Datenerfassung-digitale Potentiometer(6250)
- Datenerfassung-analog zu Digital Converters (ADC)(17776)
- Datenerfassung-analoges Frontend (AFE)(787)
- Datenerfassung-MDE/DACs-spezieller Zweck(3043)
- Clock/Timing-Uhren in Echtzeit(2446)
- Uhr/Timing - programmierbare Timer und Oszillatoren(23469)
- Clock/Timing-IC-Akkus(4)
- Takt/Timing-Delay Lines(1049)
- Uhr/Timing - Uhrengeneratoren, PLLS, Frequenzsynthesizer(32775)
- Clock/Timing-Clock Puffer, Treiber(4568)
- Clock/Timing-anwendungsspezifische(8652)
- Audio Spezial-Zweck(1564)
Relevanter Hersteller







-
Diskrete Halbleiter-Produkte
Diskrete Halbleiter-Produkte
- Aktuelle Regulierung - Dioden, Transistoren(1090)
- Transistoren-besonderer Zweck(226)
- Transistoren-programmierbare Unijunction(48)
- Transistoren-jfets(1558)
- Transistoren-IGBTs-Einzel(4799)
- Transistoren-IGBTs-Module(63420)
- Transistoren-IGBTs-Arrays(26)
- Transistoren-FETs, MOSFETs-Einzel(48330)
- Transistoren-FETs, MOSFETs-RF(4903)
- Transistoren-FETs, MOSFETs-Arrays(6641)
- Transistoren-Bipolar (BJT)-einzeln, Pre-biased(4539)
- Transistoren-Bipolar (BJT)-Einzel(25800)
- Transistoren-Bipolar (BJT)-RF(2087)
- Transistoren-bipolare (BJT)-Arrays, Pre-biased(2115)
- Transistoren-bipolare (BJT)-Arrays(2310)
- Thyristor-triacs(4044)
- Thyristoren-SCRs-Module(3967)
- Thyristoren-SCRs(5436)
- Thyristoren-diacs, sidacs(319)
- Power Driver Module(1627)
- Dioden-zenerdioden-Einzel(87483)
- Dioden-zenerdioden-Arrays(2619)
- Dioden - variable Kapazität (Varik, Varaktoren)(1200)
- Dioden-RF(2753)
- Dioden-Gleichrichter-Einzel(67528)
- Dioden-Gleichrichter-Arrays(20581)
- Dioden-Brücke-Gleichrichter(11700)
Relevanter Hersteller




-
RF/if und RFID
RF/if und RFID
- SIM -Karten für Abonnenten -Identifikationsmodul (SIM)(77)
- RF -Zirkulatoren und Isolatoren(1742)
- RFID, RF-Zugang, Monitoring-ICS(1550)
- RFID Transponder, Tags(747)
- RFID Lesegeräte(464)
- RFID -Bewertungs- und Entwicklungskits, Boards(30)
- RFID Antennen(329)
- RFI und EMI - Abschirm- und Absorbungsmaterialien(6444)
- HF und EMI-Kontakte, Fingerstock und Dichtungen(7497)
- RF Transmitter(668)
- RF Transceiver Module(6900)
- RF-Transceiver ICS(4169)
- HF-Schalter(9276)
- RF Shields(16401)
- HF-Receiver(1998)
- HF -Empfänger, Sender und Transceiver -Einheiten(2763)
- RF Power Divider/Splitter(1223)
- RF Power Controller ICs(86)
- HF-Modulatoren(710)
- HF-Mixer(2800)
- RF misc ICS und Module(3276)
- HF-Front-End (LNA + PA)(419)
- RF -Bewertungs- und Entwicklungskits, Boards(747)
- HF-gerichtete Kupplung(2718)
- RF Diplexer(1464)
- RF-Detektoren(412)
- RF-Demodulatoren(249)
- HF-Antennen(12319)
- HF-Verstärker(19651)
- Balun(1496)
- Dämpfungsglieder(4852)
Relevanter Hersteller







-
Optoelektronik
Optoelektronik
- Optomechanisch(480)
- Leuchten(125)
- Laserdioden, Lasermodule - Laserlieferung, Laserfasern(345)
- Hene Lasersysteme(31)
- Hene Laserköpfe(27)
- Hintergrundbeleuchtung anzeigen(93)
- Xenon-Beleuchtung(387)
- Touchscreen-Overlays(453)
- Panel Indicators, Pilot Lights(75729)
- Optik-Remote-Phosphor-Lichtquelle(269)
- Optik-Reflektoren(665)
- Optik-leichte Rohre(5384)
- Optik-Objektive(4951)
- LEDs-Spacer, Unentschieden(2718)
- LEDs-Lamp-Ersetzungen(29718)
- LEDs - Leiterplattenindikatoren, Arrays, Lichtstäbe, Balkendiagramme(9083)
- LED-thermische Produkte(667)
- LED-Beleuchtung(64)
- LED-Beleuchtung-weiß(37580)
- LED-Beleuchtung-Farbe(4728)
- LED-Beleuchtung-Maiskolben, Motoren, Module(28735)
- LED-Anzeige-diskret(27601)
- Laserdioden, Module(1553)
- Lampen-Glühlampen, Neons(311004)
- Lampen-Kälte-Fluoreszenz (KKL) & UV(164)
- Wechselrichter(7728)
- Infrarot, UV, sichtbare Strahler(3871)
- Fiber Optics-Transmitter-Antrieb integriert(4085)
- Fiber Optics-Transmitter-diskrete(350)
- Fiber Optics-Transceiver Module(18758)
- Fiberoptik-Switches, Multiplexer, Demultiplexer(1387)
- Fiberoptik-Receiver(695)
- Fiberoptik-Dämpfung(654)
- Elektrolumineszenz(102)
- Display, Monitor-Interface Controller(98)
- Display-Module-Vakuum-Leuchtstofflampen (VFD)(249)
- Module anzeigen-LED Dot Matrix und Cluster(865)
- Display-Module-LED-Zeichen und numerische(5421)
- Display-Module-LCD, OLED, Graphic(4654)
- Display-Module-LCD, OLED-Zeichen und numerische(2202)
- Display-Blenden, Objektive(88)
- Adresse, Spezialität(458)
Relevanter Hersteller







-
Sensoren, Wandler
Sensoren, Wandler
- Ultraschallempfänger, Sender - Industrial(115)
- Temperatursensoren - Thermostate - Mechanisch - Industrielles(3103)
- Temperatursensoren - Analog und digitaler Ausgang - Industrial(209)
- Näherungssensoren - Industrial(13611)
- Drucksensoren, Wandler - Industrie(26503)
- Optische Sensoren - Photonik - Zähler, Detektoren, SPCM (Einzelphotonzählmodul)(751)
- Optische Sensoren - Kameramodule(875)
- Magnetsensoren - Position, Nähe, Geschwindigkeit (Module) - Industrie(554)
- Kraftsensoren - Industrial(346)
- Flusssensoren - Industrielles(151)
- Float, Level Sensoren - Industrial(310)
- Encoder - Industrial(4980)
- Farbsensoren - Industrial(50)
- Berührungssensoren(100)
- Ultraschall-Receiver, Transmitter(2421)
- Temperatursensoren-Thermostat-Solid State(1096)
- Temperatursensoren-Thermostate-mechanisch(3397)
- Temperatursensoren - Thermoelemente, Temperatursonden(1921)
- Temperatursensoren - RTD (Widerstandstemperaturdetektor)(1525)
- Temperatursensoren-PTC-Thermistoren(2273)
- Temperatursensoren-ntc-thermistoren(13259)
- Temperatursensoren-Analog und Digital Output(3928)
- DMS(1399)
- Spezialisierte Sensoren(1861)
- Solarzellen(503)
- Schock-Sensoren(84)
- Sensor-Interface-Junction-Blöcke(2519)
- Sensor-Kabel-Baugruppen(22011)
- Proximity/Belegung Sensoren-fertige Einheiten(725)
- Näherungsschalter(2860)
- Drucksensoren, Wandler(11317)
- Positionssensoren - Winkel, lineare Positionsmessung(6022)
- Optische Sensoren-reflektierende-Logik-Ausgang(194)
- Optische Sensoren - reflektierend - analoge Ausgang(432)
- Optische Sensoren-Phototransistoren(1027)
- Optische Sensoren - Photointerrupter - Schlitztyp - Transistorausgang(1427)
- Optische Sensoren - Photointerrupter - Schlitztyp - Logikausgabe(1215)
- Optische Sensoren-Lichtschranke, Industrial(16763)
- Optische Sensoren-Photodioden(1543)
- Optische Sensoren-Foto-Detektoren-Remote Receiver(2605)
- Optische Sensoren-Foto-Detektoren-Logik-Ausgang(146)
- Optische Sensoren-Foto-Detektoren-CDs-Zellen(74)
- Optische Sensoren-Distanz-Messung(377)
- Optische Sensoren-Ambient Light, IR, UV Sensoren(1305)
- Multifunktions(558)
- Motion Sensors-Vibration(337)
- Motion Sensors-Tilt Schalter(67)
- Bewegungsmelder-optisch(719)
- Motion Sensors-Neigungssensoren(175)
- Motion Sensors-Imus (Trägheit-Maßeinheiten)(416)
- Motion Sensors-Kreisel(214)
- Motion Sensors-Beschleunigungsmesser(1911)
- Magnete-Sensor abgestimmt(119)
- Magnete-Multi Purpose(1965)
- Magnetische Sensoren-Schalter (Solid State)(3700)
- Magnetsensoren - Position, Nähe, Geschwindigkeit (Module)(5199)
- Magnetische Sensoren-linear, Kompass (ICS)(1247)
- Magnetsensoren - Kompass, Magnetfeld (Module)(35)
- LVDT -Wandler (linearer variabler Differentialtransformator)(204)
- IrDA Transceiver-Module(196)
- Bildsensor, Kamera(2235)
- Feuchtigkeit-Sensoren(1425)
- Gas-Sensoren(1217)
- Force Sensoren(188)
- Durchfluss-Sensoren(550)
- Float, Level Sensoren(1343)
- Encoder(6357)
- Staub-Sensoren(43)
- Aktuelle Wandler(3455)
- Color Sensoren(85)
- Verstärker(1905)
Relevanter Hersteller







-
Anschlüsse, Verbindungen
Anschlüsse, Verbindungen
- USB, DVI, HDMI -Stecker(446)
- Festkörperbeleuchtungsstecker(555)
- Steckdosen für ICs, Transistoren(953)
- Steckbare Steckverbinder(1221)
- Photovoltaik (Solarpanel) Anschlüsse(136)
- Glasfaseranschlüsse(370)
- FFC, FPC (flache flexible) Anschlüsse(761)
- D-Sub, D-förmige Stecker(2887)
- Koaxialverbinder (RF)(2389)
- Rundanschlüsse(14162)
- Stromanbeter Blade Type(273)
- Stecker und Behälter(2597)
- USB, DVI, HDMI Stecker-Adapter(572)
- USB, DVI, HDMI -Stecker(4298)
- Klemmen-Wire to Board Steckverbinder(217)
- Klemmen-Draht-Steckverbinder(4322)
- Klemmen-Draht-Pin Stecker(328)
- Terminals-Revolver Steckverbinder(1273)
- Terminals-spezialisierte Steckverbinder(2042)
- Klemmen-Spaten Verbinder(3902)
- Klemmen-Löten/Stecker(345)
- Klemmen-Verschraubungen(745)
- Klemmen-Ring Steckverbinder(12596)
- Klemmen-rechteckige Steckverbinder(4747)
- Terminals - Schnellverbindungen, schnelle Trennungsanschlüsse(8514)
- Klemmen-PC PIN, Single Post Connectors(3776)
- Klemmen-PC-Pin-Buchsen, Sockel-Steckverbinder(5883)
- Klemmen-magnetische Draht-Steckverbinder(1653)
- Klemmen-Messer Steckverbinder(112)
- Klemmen-Gehäuse, Stiefel(2850)
- Klemmen-Folie Steckverbinder(108)
- Klemmen-Barrel, Bullet-Steckverbinder(1107)
- Klemmen-Adapter(137)
- Terminal-Streifen und Revolver-Boards(1159)
- Terminal Junction Systeme(2533)
- Anschlussblöcke-Draht an Bord(43615)
- Terminal Blocks-spezialisierte(3722)
- Terminal Blocks-Power Distribution(847)
- Anschlussblöcke-Panel Mount(1359)
- Terminal Blocks-Interface Module(1819)
- Anschlussblöcke-Kopfzeilen, Stecker und Buchsen(119920)
- Anschlussblöcke-DIN-Schiene, Kanal(9373)
- Anschlussblöcke-Kontakte(65)
- Anschlussblöcke-Barrier Blocks(47517)
- Anschlussblöcke-Adapter(1059)
- Solid State Lighting Verbinder-Kontakte(271)
- Festkörperbeleuchtungsstecker(1344)
- Buchsen für ICS, Transistoren-Adapter(275)
- Steckdosen für ICs, Transistoren(22148)
- Shunts, Jumper(907)
- Rechteckige Verbinder-Feder geladen(7721)
- Rechteckige Steckverbinder-Gehäuse(43023)
- Rechteckige Verbinder-Kopfzeilen, Spezial-PIN(6129)
- Rechteckige Anschlüsse - Header, Gefäße, weibliche Sockel(229601)
- Rechteckige Verbinder-Kopfzeilen, männliche Pins(543338)
- Rechteckige Anschlüsse - kostenloses Hängen, Panelhalterung(30142)
- Rechteckige Verbinder-Kontakte(10681)
- Rechteckige Anschlüsse - Board in, Direktdraht zum Board(2432)
- Rechteckige Verbinder-Adapter(475)
- Rechteckig - Brett zu Board -Steckern - Header, Behälter, weibliche Sockel(9)
- Rechteckig - Brett zu Board -Steckern - Header, männliche Stifte(2)
- Rechteckige Anschlüsse - Board -Abstandshalter, Stacker (Board zu Board)(238901)
- Rechteckige Anschlüsse - Arrays, Kantentyp, Mezzanin (Board zu Board)(37853)
- Stromanschluss-Eingänge, Steckdosen, Module(10310)
- Steckbare Steckverbinder(6049)
- Photovoltaik- (Solarpanel) Anschlüsse - Kontakte(77)
- Photovoltaik (Solarpanel) Anschlüsse(504)
- Modulare Steckverbinder-Verdrahtung Blöcke(99)
- Modulare Steckverbinder-Stecker(1674)
- Modulare Steckverbinder-Stecker Gehäuse(181)
- Modulare Steckverbinder-Buchsen mit magnetischen(10152)
- Modulare Steckverbinder-Buchsen(23416)
- Modulare Steckverbinder-Adapter(855)
- Memory Connectors-PC Cards-Adapter(21)
- Memory Connectors-PC Card Sockets(3299)
- Memory Connectors-Inline Modul Sockets(3390)
- LGH Steckverbinder(764)
- Keystone-Einsätze(2758)
- Keystone-Frontplatte, Frames(1926)
- Heavy Duty Steckverbinder-Einsätze, Module(4190)
- Schwerlastanschlüsse - Gehäuse, Kapuzen, Basen(17226)
- Heavy Duty Steckverbinder-Frames(523)
- Heavy Duty Steckverbinder-Kontakte(1832)
- Heavy Duty Steckverbinder-Baugruppen(671)
- LWL-Steckverbinder-Gehäuse(919)
- Glasfaser-Steckverbinder - Adapter(4455)
- LWL-Steckverbinder(3001)
- FFC, FPC (flache flexible) Steckverbinder - Gehäuse(652)
- FFC, FPC (flache flexible) Anschlüsse - Kontakte(202)
- FFC, FPC (flache flexible) Anschlüsse(18691)
- D-Sub, d-förmige Steckverbinder-Terminatoren(47)
- D-Sub, d-förmige Steckverbinder-Gehäuse(12238)
- D-Sub, d-förmige Steckverbinder-Kontakte(2714)
- D-Sub, D-förmige Steckverbinder-Rückenschalen, Kapuzen(5995)
- D-Sub, d-förmige Steckverbinder-Adapter(1304)
- D-Sub Steckverbinder(141346)
- D-förmige Steckverbinder-Centronics(8770)
- Kontakte, Frühling geladen und Druck(630)
- Kontakte-Multi Purpose(6196)
- Kontakte-"Leadframe"(122)
- Koaxial-Steckverbinder (RF)-Terminatoren(1231)
- Koaxial-Steckverbinder (RF)-Kontakte(480)
- Koaxial-Steckverbinder (RF)-Adapter(6386)
- Koaxialverbinder (RF)(25734)
- Rundsteckverbinder-Gehäuse(441226)
- Rundsteckverbinder-Kontakte(4737)
- Rundsteckverbinder-backschalen und Kabel-Klemmen(53692)
- Rundsteckverbinder-Adapter(8839)
- Rundanschlüsse(1196254)
- Card Edge Steckverbinder-Gehäuse(469)
- Karte Edge Verbinder-edgeboard Verbinder(672683)
- Card Edge Verbinder-Kontakte(325)
- Card Edge Verbinder-Adapter(73)
- Blade Type Power Steckverbinder-Gehäuse(837)
- Blade Type Power Connectors-Kontakte(393)
- Stromanbeter Blade Type(4163)
- Zwischen Serien-Adapter(649)
- Barrel-Stromanschluss(935)
- Barrel-Audio-Anschlüsse(2432)
- Barrel-Audio Adapter(92)
- Banana und Tip Steckverbinder-Buchsen, Stecker(1644)
- Banana and Tip Connectors-Binding Posts(239)
- Banana und Tip Steckverbinder-Adapter(75)
- Backplane Steckverbinder-spezialisiert(45586)
- Backplane Steckverbinder-Gehäuse(6863)
- Backplane Steckverbinder-Hard metrisch, Standard(6297)
- Backplane Steckverbinder-DIN 41612(9408)
- Backplane Steckverbinder-Kontakte(3583)
- Backplane Connectors-ARINC Einsätze(2357)
- Backplane Steckverbinder-ARINC(3789)
Relevanter Hersteller







-
Widerstände
-
Kondensatoren
Kondensatoren
- Aluminium-Elektrolytkondensatoren(16817)
- Trimmer, Variable Kondensatoren(3151)
- Dünne Folien-Kondensatoren(3473)
- Tantal-Kondensatoren(136103)
- Tantal-Polymer-Kondensatoren(9778)
- Silizium-Kondensatoren(320)
- Niob Oxide Kondensatoren(330)
- Mica und PTFE Kondensatoren(9101)
- Folien-Kondensatoren(150406)
- Elektrische Doppelschichtkondensatoren (EDLC), Superkondensatoren(2782)
- Keramische Kondensatoren(833829)
- Kondensatoren-Netzwerke, Arrays(2383)
- Aluminium-Elektrolytkondensatoren(125325)
- Aluminium-Polymer-Kondensatoren(7544)
Relevanter Hersteller






-
Transformatoren
Transformatoren
Relevanter Hersteller







-
Isolatoren
-
Kristalle, Oszillatoren, Resonatoren
Kristalle, Oszillatoren, Resonatoren
Relevanter Hersteller






-
Switches
Switches
- Verriegelungsschalter(2893)
- Emergency-Stop-Schalter (E-Stop)(1160)
- Kabelzugschalter(571)
- Toggle-Schalter(33608)
- Rändelrads Schalter(742)
- Schalter(14263)
- Snap-Aktion, Endschalter begrenzen(28077)
- Slide-Schalter(5166)
- Selector-Schalter(9720)
- Rotary Switches(13850)
- Rocker Schalter(53790)
- Drucktaste-Schalter-Hall-Effekt(127)
- Drucktaste Schalter(190826)
- Programmierbare Display-Switches(39)
- Navigations-Schalter, Joystick(1882)
- Magnetische, Reed-Schalter(1399)
- Keypad-Schalter(637)
- Keylock Schalter(3684)
- DIP Schalter(7747)
- Konfigurierbare Switch-Komponenten-Objektiv(1435)
- Konfigurierbare Schalter-Komponenten-Lichtquelle(1236)
- Konfigurierbare Switch-Komponenten-Contact Block(1401)
- Konfigurierbare Switch-Komponenten-Body(16077)
- Disconnect-Switch-Komponenten(2567)
Relevanter Hersteller






-
Relais
Relais
- Sicherheitsrelais(1310)
- Reedrelais(1735)
- Hochfrequenz (RF) -Relais(1190)
- Schütze (Festkörper)(686)
- Schütze (elektromechanisch)(11952)
- Kfz-Relais(1881)
- Solid State Relais(10652)
- Signal-Relais, bis zu 2 Ampere(9149)
- Relay-Sockets(2075)
- Power Relays, über 2 Ampere(31604)
- E / A-Relaismodule(712)
- I/o-Relay-Module-Input(2)
- I/o-Relay-Modul-Racks(247)
Relevanter Hersteller
















Sprache auswählen
Aktuelle Sprache
Deutsch
- English
- Deutsch
- Italia
- Français
- 日本語
- 한국의
- русский
- Svenska
- Nederland
- español
- Português
- polski
- Suomi
- Gaeilge
- Slovenská
- Slovenija
- Čeština
- Melayu
- Magyarország
- Hrvatska
- Dansk
- românesc
- Indonesia
- Ελλάδα
- Български език
- Afrikaans
- IsiXhosa
- isiZulu
- lietuvių
- Maori
- Kongeriket
- Монголулс
- O'zbek
- Tiếng Việt
- हिंदी
- اردو
- Kurdî
- Català
- Bosna
- Euskera
- العربية
- فارسی
- Corsa
- Chicheŵa
- עִבְרִית
- Latviešu
- Hausa
- Беларусь
- አማርኛ
- Republika e Shqipërisë
- Eesti Vabariik
- íslenska
- မြန်မာ
- Македонски
- Lëtzebuergesch
- საქართველო
- Cambodia
- Pilipino
- Azərbaycan
- ພາສາລາວ
- বাংলা ভাষার
- پښتو
- malaɡasʲ
- Кыргыз тили
- Ayiti
- Қазақша
- Samoa
- සිංහල
- ภาษาไทย
- Україна
- Kiswahili
- Cрпски
- Galego
- नेपाली
- Sesotho
- Тоҷикӣ
- Türk dili
- ગુજરાતી
- ಕನ್ನಡkannaḍa
- मराठी
Funktionen, Pinbelegung und Anwendungen des LSM6DSL-Sensors
Zeit: 2026/01/23
Durchsuchen: 650
Moderne Bewegungserkennungsanwendungen erfordern Komponenten, die präzise, energieeffizient und flexibel genug sind, um ein breites Spektrum an Anwendungsfällen zu unterstützen.Der LSM6DSL

LSM6DSL
ST
ST 2020+RoHS
In Stock: 10300 pcs
erfüllt diese Anforderungen.In diesem Artikel werden die Übersicht, Pinbelegungsdetails, Funktionalität, Spezifikationen, Arbeitsschaltung, Anwendungen und mehr des LSM6DSL-Sensors erläutert.
Katalog

Übersicht über den LSM6DSL-Sensor
Die LSM6DSL
LSM6DSL
ST
ST 2020+RoHS
In Stock: 10300 pcs
ist ein kompakter MEMS-Trägheitssensor, der einen digitalen 3-Achsen-Beschleunigungsmesser und ein digitales 3-Achsen-Gyroskop in einem einzigen System-in-Package integriert.Es wurde von STMicroelectronics entwickelt und bietet eine genaue Bewegungserkennung bei gleichzeitig geringem Stromverbrauch.
Dieser Sensor unterstützt erweiterte Bewegungsfunktionen, einschließlich realer, virtueller und Batch-Sensoren, mit integriertem Speicher für eine effiziente Datenstapelung.Seine konfigurierbaren Vollbereichsbereiche ermöglichen eine präzise Messung sowohl der linearen Beschleunigung als auch der Winkelgeschwindigkeit und unterstützen ein breites Spektrum an Bewegungsverfolgungsanforderungen.Der LSM6DSL basiert auf ausgereifter MEMS-Mikrobearbeitung und CMOS-Schnittstellentechnologie und bietet eine hohe Widerstandsfähigkeit gegen mechanische Stöße und eine stabile Langzeitleistung.
Verpackt in einem kompakten LGA-Formfaktor ist der LSM6DSL ideal für Designs mit begrenztem Platzangebot, die eine zuverlässige Bewegungserkennung erfordern.Wenn Sie Interesse am Kauf des LSM6DSL haben, kontaktieren Sie uns bitte bezüglich Preis und Verfügbarkeit.
CAD-Modelle des LSM6DSL-Sensors

Details zur Pinbelegung des LSM6DSL-Sensors


|
Pin
# |
Pin
Name |
Modus
1 Funktion |
Modus
2 Funktion |
|
1 |
SDO / SA0 |
SPI 4-Draht
serielle Datenausgabe (SDO);I²C niedrigstwertiges Adressbit (SA0) |
SPI 4-Draht
serielle Datenausgabe (SDO);I²C niedrigstwertiges Adressbit (SA0) |
|
2 |
SDx |
Stellen Sie eine Verbindung zu VDDIO her
oder GND |
Serielle I²C-Daten
Master (MSDA) |
|
3 |
SCx |
Stellen Sie eine Verbindung zu VDDIO her
oder GND |
Serieller I²C-Takt
Master (MSCL) |
|
4 |
INT1 |
Programmierbar
unterbrechen 1 |
Programmierbar
unterbrechen 1 |
|
5 |
VDDIO |
Netzteil für
I/O-Pins |
Netzteil für
I/O-Pins |
|
6 |
GND |
0-V-Versorgung |
0-V-Versorgung |
|
7 |
GND |
0-V-Versorgung |
0-V-Versorgung |
|
8 |
VDD |
Stromversorgung |
Stromversorgung |
|
9 |
INT2 |
Programmierbar
Interrupt 2 (INT2) / Datenfreigabe (DEN) |
Programmierbar
Interrupt 2 (INT2) / Datenfreigabe (DEN) / I²C-Master externe Synchronisation
Signal (MDRDY) |
|
10 |
NC |
Geh
unverbunden |
Geh
unverbunden |
|
11 |
NC |
Geh
unverbunden |
Geh
unverbunden |
|
12 |
CS |
I²C/SPI-Modus
Auswahl (1: SPI im Leerlauf / I²C aktiviert; 0: SPI aktiviert / I²C deaktiviert) |
I²C/SPI-Modus
Auswahl (1: SPI im Leerlauf / I²C aktiviert; 0: SPI aktiviert / I²C deaktiviert) |
|
13 |
SCL |
Serieller I²C-Takt
(SCL);SPI-Seriell-Port-Uhr (SPC) |
Serieller I²C-Takt
(SCL);SPI-Seriell-Port-Uhr (SPC) |
|
14 |
SDA |
Serielle I²C-Daten
(SDA);SPI serieller Dateneingang (SDI);3-Draht-Schnittstelle, serieller Datenausgang (SDO) |
Serielle I²C-Daten
(SDA);SPI serieller Dateneingang (SDI);3-Draht-Schnittstelle, serieller Datenausgang (SDO) |
Funktionalität des LSM6DSL-Sensors
Der LSM6DSL
LSM6DSL
ST
ST 2020+RoHS
In Stock: 10300 pcs
ist auf ein flexibles Betriebsverhalten ausgelegt, sodass Beschleunigungsmesser und Gyroskop unabhängig voneinander gesteuert werden können.Jedes Sensorelement kann separat ein- oder ausgeschaltet werden, wodurch der Stromverbrauch entsprechend den Anwendungsanforderungen optimiert wird.Das Gerät unterstützt drei Hauptbetriebskonfigurationen: Betrieb nur des Beschleunigungsmessers, während das Gyroskop ausgeschaltet bleibt, Betrieb nur des Gyroskops, während der Beschleunigungsmesser deaktiviert ist, oder Betrieb beider Sensoren gleichzeitig.Wenn beide Sensoren aktiv sind, können sie mit unterschiedlichen Ausgangsdatenraten konfiguriert werden, was eine präzise Abstimmung der Bewegungserkennung ermöglicht, ohne dass die beiden Sensoren das gleiche Abtastverhalten aufweisen müssen.
Die Gyroskop Der LSM6DSL unterstützt mehrere Energiemodi, um Leistung und Energieeffizienz in Einklang zu bringen.Je nach Systemanforderungen kann es im Power-Down-, Low-Power-, Normal- oder High-Performance-Modus betrieben werden.Im Hochleistungsmodus liefert das Gyroskop eine konstante Leistung über einen weiten Bereich von Ausgangsdatenraten und eignet sich daher für schnelle und präzise Rotationsmessungen.Wenn die Energiesparmodi aktiviert sind, reduziert das Gyroskop den Energieverbrauch, indem es den Betrieb auf niedrigere oder moderate Datenraten beschränkt. Dies ist ideal für batteriebetriebene Geräte, die keine kontinuierliche Hochgeschwindigkeitserfassung erfordern.
Die Beschleunigungsmesser verfolgt einen ähnlichen Designansatz und bietet die Betriebsmodi Power-Down, Low-Power, Normal und High-Performance.Der Hochleistungsmodus ermöglicht eine genaue Beschleunigungsmessung über den gesamten unterstützten Datenratenbereich, während der Low-Power- und der Normalmodus für einen reduzierten Energieverbrauch bei Abtastfrequenzen im unteren und mittleren Bereich optimiert sind.Diese Anpassungsfähigkeit ermöglicht dem LSM6DSL eine effiziente Leistung sowohl bei ständig aktiver Bewegungserkennung als auch bei hochpräzisen Erfassungsszenarien.Der von STMicroelectronics entwickelte LSM6DSL bietet eine ausgewogene Kombination aus Flexibilität, Leistung und Energieeffizienz für moderne Bewegungserkennungsanwendungen.
Interne Filter- und Signalverarbeitungsarchitektur

Das erste Diagramm stellt den gesamten internen Signalpfad des LSM6DSL
LSM6DSL
ST
ST 2020+RoHS
In Stock: 10300 pcs
-Sensors dar und zeigt, wie Bewegungsdaten von den Sensorelementen bis zum digitalen Ausgang verarbeitet werden.Das Gyroskop, der Beschleunigungsmesser und der Temperatursensor leiten ihre analogen Signale zunächst durch spezielle Front-End-Schaltkreise.Diese Front-End-Blöcke bereiten die Rohsignale auf, bevor sie durch interne Analog-Digital-Wandler (ADC1 für das Gyroskop und ADC2 für den Beschleunigungsmesser) in digitale Daten umgewandelt werden.
Nach der Umwandlung werden die digitalen Signale durch Tiefpassfilterstufen geleitet, die dabei helfen, Rauschen und unerwünschte Hochfrequenzkomponenten zu reduzieren.Die gefilterten Daten werden dann in internen Registern oder im FIFO-Puffer gespeichert, was eine effiziente Datenverarbeitung und einen reduzierten Kommunikationsaufwand ermöglicht.Schließlich werden die verarbeiteten Daten über die I²C- oder SPI-Schnittstelle an den Host-Prozessor übertragen, während der Interrupt-Management-Block Ereignissignale wie Datenbereitschafts- oder Bewegungserkennungswarnungen generiert.

Das zweite Diagramm konzentriert sich speziell auf die digitale Filterkette des Gyroskops.Sobald das Gyroskopsignal vom ADC digitalisiert wurde, kann es einen optionalen Hochpassfilter durchlaufen, der Niederfrequenzdrift und Offsets entfernt.Darauf folgt eine wählbare Tiefpassfilterstufe, die das Signal glättet und die Bandbreite entsprechend der gewählten Ausgangsdatenrate steuert.
Eine zweite Tiefpassfilterstufe verfeinert die Winkelgeschwindigkeitsdaten weiter, bevor sie an den FIFO oder direkt an die Kommunikationsschnittstelle gesendet werden.Diese mehrstufige Filterstruktur ermöglicht es dem Gyroskop, sowohl hochpräzise Bewegungsverfolgung als auch schnell reagierende Anwendungen zu unterstützen und gleichzeitig stabile und zuverlässige Ausgangsdaten aufrechtzuerhalten.

Das Beschleunigungsmesserdiagramm zeigt den grundlegenden Signalpfad, der zur Verarbeitung von Beschleunigungsdaten im LSM6DSL verwendet wird.Das rohe analoge Signal vom MEMS-Beschleunigungsmesser durchläuft zunächst einen analogen Anti-Aliasing-Tiefpassfilter, der hochfrequentes Rauschen vor der digitalen Umwandlung entfernt.Dieser Schritt ist wichtig, um unerwünschte Signalverzerrungen während der Abtastung zu verhindern.Nach der Filterung wird das Signal vom internen ADC in digitale Form umgewandelt.
Nach der Digitalisierung fließen die Daten durch einen digitalen Tiefpassfilter (LPF1), dessen Bandbreite so konfiguriert werden kann, dass sie der ausgewählten Ausgangsdatenrate entspricht.Diese digitale Filterstufe glättet das Signal weiter und verbessert die Messstabilität.Die gefilterte Ausgabe kann dann in einen zusammengesetzten Filter geleitet werden, der erweiterte Bewegungsverarbeitungsfunktionen ermöglicht, ohne dass zusätzliche Berechnungen vom Host-Prozessor erforderlich sind.

Das vierte Diagramm beschreibt detailliert die interne Struktur des Verbundfilters des Beschleunigungsmessers.Dieser Block kombiniert mehrere Filterpfade, einschließlich Tiefpassfilter, Hochpassfilter und Steigungsfilter, um verschiedene Bewegungserkennungsfunktionen zu unterstützen.Abhängig von der Konfiguration können Beschleunigungsdaten durch diese Filter geleitet werden, um Ereignisse wie freien Fall, Aufwachen, Aktivität oder Inaktivität sowie 6D/4D-Ausrichtungsänderungen zu erkennen.
Der Verbundfilter unterstützt auch intelligente Funktionen wie Schritterkennung und signifikante Bewegungsüberwachung durch selektive Datenverarbeitung bei reduzierten Ausgangsdatenraten.Gefilterte Beschleunigungsdaten werden dann entweder an die Ausgangsregister gesendet oder im FIFO-Puffer gespeichert, um eine effiziente Übertragung an das Hostsystem zu ermöglichen.Durch die interne Handhabung komplexer Filter- und Bewegungsanalysen reduziert der LSM6DSL die MCU-Arbeitsbelastung und bietet gleichzeitig eine genaue und reaktionsschnelle Bewegungserkennung für Anwendungen mit geringem Stromverbrauch.
Alternativen und gleichwertiges Modell
• LSM6DS3
LSM6DS3
ST
LSM6DS3 ST
In Stock: 10100 pcs
• LSM6DSOX
• BMI160

BMI160
Bosch Sensortec
IMU ACCEL/GYRO I2C/SPI 14LGA
In Stock: 10400 pcs
• ICM-20602
ICM-20602
TDK InvenSense
IMU ACCEL/GYRO/TEMP I2C/SPI LGA
In Stock: 20200 pcs
• MPU-6500

MPU-6500
TDK InvenSense
IMU ACCEL/GYRO 3-AXIS I2C 24QFN
In Stock: 39017 pcs
Technische Daten des LSM6DSL-Sensors
|
Parameter |
Beschreibung |
|
Sensortyp |
3-Achsen
Beschleunigungsmesser und 3-Achsen-Gyroskop |
|
Technologie |
MEMS
(Mikroelektromechanische Systeme) |
|
Hersteller |
STMicroelectronics |
|
Pakettyp |
LGA-16 |
|
Paket
Abmessungen |
3 × 3 mm |
|
Betrieb
Spannung |
1,71 V bis 3,6 V |
|
I/O-Versorgung
Spannung |
1,62 V bis 3,6 V |
|
Aktuell
Verbrauch |
Normalmodus:
~1,1 mA;Energiesparmodus: ~0,1 µA;Schlafmodus: ~0 µA |
|
Beschleunigungsmesser
Reichweite |
±2 g, ±4 g, ±8
g, ±16 g |
|
Beschleunigungsmesser
Auflösung |
16-Bit |
|
Gyroskop-Reichweite |
±125, ±250,
±500, ±1000, ±2000 dps |
|
Gyroskop
Auflösung |
16-Bit |
|
Ausgabedatenrate
(Beschleunigungsmesser) |
Bis zu 6,66 kHz |
|
Ausgabedatenrate
(Gyroskop) |
Bis zu 6,66 kHz |
|
Digital
Schnittstellen |
I²C (bis zu 400
kHz) und SPI (bis zu 10 MHz) |
|
Unterbrechungsstifte |
INT1, INT2 |
|
FIFO-Puffer |
Smart FIFO bis zu
4 kB |
|
Eingebettet
Temperatursensor |
Ja |
|
Maschinelles Lernen
Kern (MLC) |
Unterstützt für
Bewegungs- und Aktivitätsanalyse |
|
Endlicher Zustand
Maschine (FSM) |
Unterstützt für
Bewegungserkennung und Schrittzählung |
|
Bewegungserkennung |
Freier Fall,
Aufwachen, Aktivität/Inaktivität |
|
Tippen Sie auf Erkennung |
Einmaliges Tippen und
Doppeltippen |
|
Orientierung
Erkennung |
6D / 4D
Orientierung |
|
Sensorfusion
Unterstützung |
Ja |
|
Leistungsmodi |
Ausschalten,
Geringer Stromverbrauch, Normal, Hochleistung, Ruhezustand |
|
Lärm
Leistung |
Geräuscharm für
genaue dynamische Messungen |
|
Betrieb
Temperaturbereich |
−40 °C bis +85 °C |
|
Umweltfreundlich
Compliance |
RoHS-konform |
Funktionen des LSM6DSL-Sensors
• Android M-kompatibel – Vollständig kompatibel mit den Anforderungen des Android M-Sensor-Frameworks, wodurch es für Smartphones, Wearables und Android-basierte Bewegungserkennungsanwendungen geeignet ist.
• Geringer Stromverbrauch – Verbraucht etwa 0,4 mA im kombinierten Normalmodus und 0,65 mA im kombinierten Hochleistungsmodus und trägt so zur Verlängerung der Batterielebensdauer in tragbaren Geräten bei.
• Always-On-Bewegungserlebnis – Entwickelt, um die Bewegungserkennung bei geringem Stromverbrauch aktiv zu halten und eine kontinuierliche Erfassung ohne häufiges Aufwachen der MCU zu ermöglichen.
• Intelligenter FIFO-Puffer (bis zu 4 kB) – Der integrierte FIFO speichert Sensordaten intern, reduziert die Belastung des Host-Prozessors und verbessert die Gesamtstromeffizienz.
• Großer Beschleunigungsmessbereich – Unterstützt Vollausschlagsbereiche von ±2 / ±4 / ±8 / ±16 g und ermöglicht so die genaue Erkennung sowohl subtiler Bewegungen als auch starker Stöße.
• Großer Winkelgeschwindigkeitsmessbereich – Bietet Bereiche von ±125 / ±250 / ±500 / ±1000 / ±2000 dps, geeignet für langsame Rotation und schnelle Bewegungsverfolgung.
• Eingebettete Bewegungsalgorithmen – Beinhaltet Schrittzähler, Schrittdetektor, Schrittzähler, Erkennung signifikanter Bewegungen und Neigungserkennung, wodurch die Softwarekomplexität auf dem Hostsystem reduziert wird.
• Standard-Bewegungsunterbrechungen – Unterstützt Hardware-Unterbrechungen wie Freifall, Aufwecken, 6D/4D-Ausrichtung, Klicken und Doppelklicken für ereignisgesteuerte Anwendungen.
• Unterstützung für externe Magnetometer – Ermöglicht die Korrektur von Harteisen und Weicheisen bei Verbindung mit einem externen Magnetsensor und verbessert so die Genauigkeit der Sensorfusion.
• Duale digitale Kommunikationsschnittstellen – Unterstützt sowohl I²C als auch SPI und bietet flexible Konnektivität mit Mikrocontrollern und Anwendungsprozessoren.
• Integrierter Temperatursensor – Bietet interne Temperaturmessung zur Kompensation und Systemüberwachung.
• Großer Versorgungsspannungsbereich – Betrieb mit einer analogen Versorgung von 1,71 V bis 3,6 V und einer unabhängigen E/A-Versorgung, wodurch die Kompatibilität mit Niederspannungssystemen gewährleistet ist.
• Kompaktes LGA-Gehäuse – Geringer Platzbedarf von ca. 2,5 mm × 3,0 mm × 0,83 mm, ideal für Designs mit begrenztem Platzangebot.
• Hohe mechanische Robustheit – Gebaut, um mechanischen Stößen und Vibrationen standzuhalten und einen zuverlässigen Betrieb in Verbraucher- und Industrieumgebungen zu gewährleisten.
• Umweltkonformität – Vollständig ECOPACK®-, RoHS- und „Green“-konform und erfüllt globale Umweltstandards.
Arbeitskreis des LSM6DSL-Sensors

Der Arbeitsschaltkreis zeigt, wie der LSM6DSL
LSM6DSL
ST
ST 2020+RoHS
In Stock: 10300 pcs
mit Strom versorgt und an einen Host-Controller angeschlossen wird.Der Sensor verwendet separate Versorgungspins für den internen Kern (VDD) und die digitale Schnittstelle (VDDIO).Jeder Versorgungspin ist über einen 100-nF-Entkopplungskondensator mit Masse verbunden, was zur Stabilisierung der Stromversorgung und zur Reduzierung elektrischer Störungen während des Betriebs beiträgt.
Der Sensor kommuniziert mit dem Host über I²C oder SPI.Im I²C-Setup werden den SDA- und SCL-Leitungen Pull-up-Widerstände hinzugefügt, um eine ordnungsgemäße Datenkommunikation sicherzustellen.Der CS-Pin wird zur Auswahl des Kommunikationsmodus verwendet.Die Interrupt-Pins INT1 und INT2 ermöglichen es dem Sensor, den Host zu benachrichtigen, wenn Bewegungsereignisse oder neue Daten verfügbar sind, wodurch die Notwendigkeit einer ständigen Abfrage reduziert wird.

Die Orientierungsdiagramme erklären, wie Bewegung gemessen wird.Der Beschleunigungsmesser erkennt Bewegungen entlang der X-, Y- und Z-Achse, während das Gyroskop die Drehung um diese Achsen misst.Die korrekte Ausrichtung des Sensors auf der Leiterplatte gewährleistet genaue Bewegungs- und Rotationsmessungen.
LSM6DSL-Sensoranwendungen
• Tragbare Geräte
• Smartphones und Tablets
• Fitness-Tracker
• IoT-Geräte
• Gaming-Controller
• Virtual-Reality-Systeme (VR).
• Augmented Reality (AR)-Geräte
• Robotik
• Automobilsysteme
• Industrieausrüstung
• Smart-Home-Geräte
• Medizinische und Gesundheitsüberwachungsgeräte
Mechanische Abmessungen des LSM6DSL
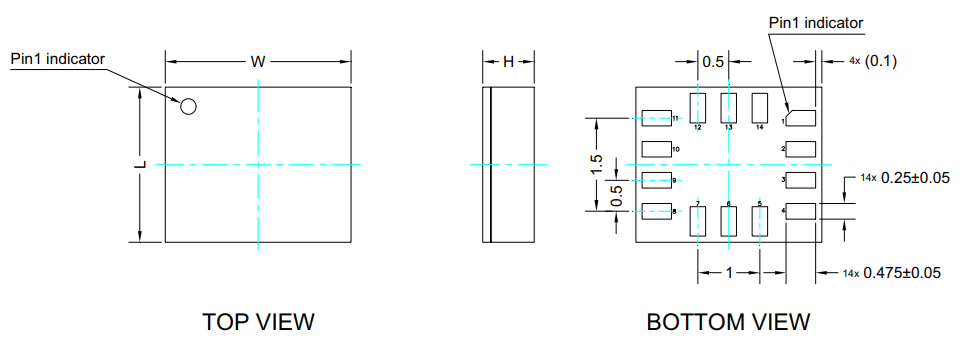
|
Artikel |
Dimension
(mm) |
Toleranz
(mm) |
|
Länge (L) |
2,50 |
±0,1 |
|
Breite (B) |
3,00 |
±0,1 |
|
Höhe (H) |
0,86 |
MAX |
Hersteller
STMicroelectronics nutzt fortschrittliche MEMS-Fertigungsmöglichkeiten, um den LSM6DSL
LSM6DSL
ST
ST 2020+RoHS
In Stock: 10300 pcs
-Sensor mit hoher Präzision und Zuverlässigkeit herzustellen.Das Unternehmen nutzt ausgereifte Mikrobearbeitungsprozesse zur Herstellung der Beschleunigungsmesser- und Gyroskop-Sensorelemente, kombiniert mit CMOS-Technologie für die Signalverarbeitung und Schnittstellenschaltung.Diese Prozesse ermöglichen eine strenge Kontrolle der Sensorgenauigkeit, des Stromverbrauchs und der mechanischen Robustheit und unterstützen gleichzeitig die Massenproduktion.
Häufig gestellte Fragen [FAQ]
1. Muss der LSM6DSL vor der Verwendung kalibriert werden?
Für den Grundbetrieb ist keine Kalibrierung erforderlich, aber die Offset- und Empfindlichkeitskalibrierung kann die Genauigkeit verbessern, insbesondere bei Präzisionsbewegungs- oder Ausrichtungsanwendungen.
2. Kann LSM6DSL ohne Mikrocontroller funktionieren?
Nein, der LSM6DSL benötigt einen Host-Prozessor, um Register zu konfigurieren, Sensordaten zu lesen und die Kommunikation über I²C oder SPI zu verwalten.
3. Welche Bibliotheken stehen für die Verwendung von LSM6DSL mit Mikrocontrollern zur Verfügung?
ST stellt offizielle Treiber bereit und von der Community unterstützte Bibliotheken sind für Plattformen wie Arduino, STM32, ESP32 und Raspberry Pi verfügbar.
4. Wie genau ist der LSM6DSL für die Bewegungsverfolgung?
Der Sensor bietet eine hohe Genauigkeit bei geringem Rauschen und einer 16-Bit-Auflösung und eignet sich für Bewegungsverfolgung, Gestenerkennung und Orientierungserkennung.
5. Kann der LSM6DSL zur Schrittzählung ohne externe Verarbeitung verwendet werden?
Ja, es verfügt über integrierte Schritterkennungs- und Schrittzählfunktionen, die intern arbeiten, wodurch der Bedarf an komplexen hostseitigen Algorithmen verringert wird.
6. Wie hoch ist die typische Datenlatenz des LSM6DSL?
Die Latenz hängt von der gewählten Ausgangsdatenrate und Filterkonfiguration ab, ist jedoch für eine schnelle Reaktion in Echtzeit-Bewegungsanwendungen optimiert.
7. Ist der LSM6DSL stoß- und vibrationsfest?
Ja, es ist auf hohe mechanische Robustheit ausgelegt und ermöglicht einen zuverlässigen Betrieb in tragbaren, industriellen und Automobilumgebungen.
Verwandter Artikel
-
![Was ist der Alkoholgassensor MQ-3 und wie funktioniert er?]() Feb 03 2026Was ist der Alkoholgassensor MQ-3 und wie funktioniert er?
Feb 03 2026Was ist der Alkoholgassensor MQ-3 und wie funktioniert er?Der Alkoholgassensor MQ-3 ist ein Halbleitersensor zur Erkennung von Ethanoldampf in der Luft und ist damit eine Schlüsselkomponente in Atemanalysato... -
![Vollständiger Leitfaden zum Datenblatt des LM35-Temperatursensors]() Jan 23 2026Vollständiger Leitfaden zum Datenblatt des LM35-Temperatursensors
Jan 23 2026Vollständiger Leitfaden zum Datenblatt des LM35-TemperatursensorsDer Temperatursensor LM35 ist ein weit verbreitetes analoges Präzisionsgerät, das genaue und lineare Temperaturmessungen direkt in Grad Celsius lief...


Verwandte -Produkte

PIC16F18856-I/MV
IC MCU 8BIT 28KB FLASH 28UQFN

XC5VLX155T-1FFG1738C
IC FPGA 680 I/O 1738FCBGA

V48C24C150A
IGBT Modules
UPD64084GC
NEC QFP
PT8300-S
PT8300-S PTC
BCM7631YKFEBG
BCM7631YKFEBG BROADCO

LA7796T-TLM-E
LA7796T-TLM-E SANYO

LPC2144FBD64
LPC2144FBD64 PHIL
UPD789176GA-E01-YEU
UPD789176GA-E01-YEU NEC

TMCMB1A336MTRF
CAP TANT 33UF 20% 10V 1411
KXCF5272VF66
MOTOROLA BGA

BDCN-20-13+
RF DIR COUPLER 360MHZ-1GHZ 6SMD

AZ6118-01F.R7GR
Relevanzprodukte
BMI160
IMU ACCEL/GYRO I2C/SPI 14LGA
vorrätig: 197
MPU-6500
IMU ACCEL/GYRO 3-AXIS I2C 24QFN
vorrätig: 1859
ICM-20602
IMU ACCEL/GYRO/TEMP I2C/SPI LGA
vorrätig: 558
LSM6DS3
LSM6DS3 ST
vorrätig: 1894
LSM6DSL
ST 2020+RoHS
vorrätig: 1903