Alle Kategorien
-
Integrierte schaltkreise (ICS)
Integrierte schaltkreise (ICS)
- Schnittstelle - Sensor, kapazitive Berührung(642)
- Spezialisierte ICS(12302)
- PMIC-Spannungsregler-besonderer Zweck(5644)
- PMIC-Spannungsregler-lineare Regler(793)
- PMIC-Spannungsregler-linear + Switching(1829)
- PMIC-Spannungsregler-linear(70981)
- PMIC-Spannungsregler-DC DC Switching Regulators(39569)
- PMIC-Regler-DC-DC-Switching-Controller(13507)
- PMIC-Spannungs-Referenz(9453)
- PMIC-v/f und f/v-Wandler(145)
- PMIC-Thermal Management(592)
- PMIC-Supervisor(47946)
- PMIC-RMS bis DC-Wandler(170)
- PMIC-Netzteil-Controller, Monitore(2104)
- PMIC-Power over Ethernet (PoE) Controller(1008)
- PMIC-Power Management-spezialisierte(7722)
- PMIC-Netzschalter, Treiber laden(7706)
- PMIC-PFC (Power Factor Correction)(1222)
- PMIC oder Steuerungen, ideale Dioden(705)
- PMIC-Motor-Treiber, Regler(4712)
- PMIC-Beleuchtung, Ballast-Regler(560)
- PMIC-LED-Treiber(7282)
- PMIC-Laser-Treiber(573)
- PMIC-Hot-Swap-Controller(2816)
- PMIC-Gate-Treiber(7083)
- PMIC-voll, Half-Bridge-Treiber(1342)
- PMIC-Energy Messung(654)
- PMIC-Display-Treiber(1435)
- PMIC-derzeitige Regulierung/Management(1481)
- PMIC-Batterie-Management(5553)
- PMIC-Ladegeräte(3831)
- PMIC-AC DC Konverter, Offline Schalter(4905)
- Memory-Controller(358)
- Memory-Konfigurations-Proms für FPGAs(639)
- Speicher-Akkus(13)
- Erinnerung(65694)
- Logic-universelle Bus-Funktionen(706)
- Logic-Übersetzer, Level-Shifter(2854)
- Logik-Specialty Logic(1870)
- Logik-Signal-Schalter, Multiplexer, Decoder(9420)
- Logic-Shift-Register(2665)
- Logic-Parity Generatoren und Checkers(335)
- Logic-multivibratoren(831)
- Logik-Latches(3658)
- Logik - Tore und Wechselrichter - Multifunktion, konfigurierbar(1687)
- Logik-Tore und Wechselrichter(16453)
- Logic-Flip Flops(7780)
- Logik-FIFOs Speicher(4240)
- Logik-Zähler, Trennlinien(3456)
- Logik-Vergleichsoperator(592)
- Logik-Puffer, Treiber, Receiver, Transceiver(17835)
- Linear-Video-Verarbeitung(2909)
- Linear-Vergleichsoperator(5084)
- Linear-analoge Multiplikatoren, Trennwände(263)
- Linear-Verstärker-Video Amps und Module(1905)
- Linear-Verstärker-Spezial-Zweck(1856)
- Linear - Verstärker - Instrumentierung, OP -Verstärker, Pufferverstärker(34236)
- Linear-Verstärker-Audio(4567)
- Interface-Voice Record und Playback(556)
- Schnittstelle - UARTs (Universal Asynchronous Receivers -Sender)(1237)
- Schnittstelle-Telecom(4467)
- Interface-spezialisierte(4833)
- Interface-Signal Terminatoren(333)
- Interface-Signal-Puffer, Repeater, Splitter(1449)
- Interface-Serializer, Deserializer(1480)
- Schnittstellen-Sensor und Detektor-Interfaces(1524)
- Interface-Module(169)
- Interface-Modems-ICS und Module(407)
- Interface-e/a-Expander(1136)
- Interface-Filter-aktiv(1226)
- Interface-Encoder, Decoder, Konverter(714)
- Interface-Treiber, Receiver, Transceiver(20755)
- Interface-Direct Digital Synthesis (DDS)(117)
- Interface-Controller(3628)
- Interface-Codecs(1676)
- Schnittstelle - Analoge Switches, Multiplexer, Demultiplexer(12567)
- Schnittstelle-analoge Schalter-spezieller Zweck(2533)
- Embedded-System on Chip (SoC)(4496)
- Embedded-PLDs (programmierbare Logik-Vorrichtung)(971)
- Embedded-Mikroprozessoren(10083)
- Embedded-Mikrocontroller-anwendungsspezifische(2275)
- Embedded-Mikrocontroller(99285)
- Eingebettet - Mikrocontroller, Mikroprozessor, FPGA -Module(1527)
- Eingebettet - FPGAs (Feldprogrammiergate -Array) mit Mikrocontrollern(81)
- Embedded-FPGAs (Field Programmable Gate Array)(27747)
- Embedded-DSP (Digital Signal Processors)(4081)
- Eingebettet - CPLDs (komplexe programmierbare Logikgeräte)(5187)
- Datenerfassung-Touch Screen Controller(1210)
- Datenerfassung-Digital to Analog Converter (DAC)(14419)
- Datenerfassung-digitale Potentiometer(6250)
- Datenerfassung-analog zu Digital Converters (ADC)(17776)
- Datenerfassung-analoges Frontend (AFE)(787)
- Datenerfassung-MDE/DACs-spezieller Zweck(3043)
- Clock/Timing-Uhren in Echtzeit(2446)
- Uhr/Timing - programmierbare Timer und Oszillatoren(23469)
- Clock/Timing-IC-Akkus(4)
- Takt/Timing-Delay Lines(1049)
- Uhr/Timing - Uhrengeneratoren, PLLS, Frequenzsynthesizer(32775)
- Clock/Timing-Clock Puffer, Treiber(4568)
- Clock/Timing-anwendungsspezifische(8652)
- Audio Spezial-Zweck(1564)
Relevanter Hersteller







-
Diskrete Halbleiter-Produkte
Diskrete Halbleiter-Produkte
- Aktuelle Regulierung - Dioden, Transistoren(1090)
- Transistoren-besonderer Zweck(226)
- Transistoren-programmierbare Unijunction(48)
- Transistoren-jfets(1558)
- Transistoren-IGBTs-Einzel(4799)
- Transistoren-IGBTs-Module(63420)
- Transistoren-IGBTs-Arrays(26)
- Transistoren-FETs, MOSFETs-Einzel(48330)
- Transistoren-FETs, MOSFETs-RF(4903)
- Transistoren-FETs, MOSFETs-Arrays(6641)
- Transistoren-Bipolar (BJT)-einzeln, Pre-biased(4539)
- Transistoren-Bipolar (BJT)-Einzel(25800)
- Transistoren-Bipolar (BJT)-RF(2087)
- Transistoren-bipolare (BJT)-Arrays, Pre-biased(2115)
- Transistoren-bipolare (BJT)-Arrays(2310)
- Thyristor-triacs(4044)
- Thyristoren-SCRs-Module(3967)
- Thyristoren-SCRs(5436)
- Thyristoren-diacs, sidacs(319)
- Power Driver Module(1627)
- Dioden-zenerdioden-Einzel(87483)
- Dioden-zenerdioden-Arrays(2619)
- Dioden - variable Kapazität (Varik, Varaktoren)(1200)
- Dioden-RF(2753)
- Dioden-Gleichrichter-Einzel(67528)
- Dioden-Gleichrichter-Arrays(20581)
- Dioden-Brücke-Gleichrichter(11700)
Relevanter Hersteller




-
RF/if und RFID
RF/if und RFID
- SIM -Karten für Abonnenten -Identifikationsmodul (SIM)(77)
- RF -Zirkulatoren und Isolatoren(1742)
- RFID, RF-Zugang, Monitoring-ICS(1550)
- RFID Transponder, Tags(747)
- RFID Lesegeräte(464)
- RFID -Bewertungs- und Entwicklungskits, Boards(30)
- RFID Antennen(329)
- RFI und EMI - Abschirm- und Absorbungsmaterialien(6444)
- HF und EMI-Kontakte, Fingerstock und Dichtungen(7497)
- RF Transmitter(668)
- RF Transceiver Module(6900)
- RF-Transceiver ICS(4169)
- HF-Schalter(9276)
- RF Shields(16401)
- HF-Receiver(1998)
- HF -Empfänger, Sender und Transceiver -Einheiten(2763)
- RF Power Divider/Splitter(1223)
- RF Power Controller ICs(86)
- HF-Modulatoren(710)
- HF-Mixer(2800)
- RF misc ICS und Module(3276)
- HF-Front-End (LNA + PA)(419)
- RF -Bewertungs- und Entwicklungskits, Boards(747)
- HF-gerichtete Kupplung(2718)
- RF Diplexer(1464)
- RF-Detektoren(412)
- RF-Demodulatoren(249)
- HF-Antennen(12319)
- HF-Verstärker(19651)
- Balun(1496)
- Dämpfungsglieder(4852)
Relevanter Hersteller







-
Optoelektronik
Optoelektronik
- Optomechanisch(480)
- Leuchten(125)
- Laserdioden, Lasermodule - Laserlieferung, Laserfasern(345)
- Hene Lasersysteme(31)
- Hene Laserköpfe(27)
- Hintergrundbeleuchtung anzeigen(93)
- Xenon-Beleuchtung(387)
- Touchscreen-Overlays(453)
- Panel Indicators, Pilot Lights(75729)
- Optik-Remote-Phosphor-Lichtquelle(269)
- Optik-Reflektoren(665)
- Optik-leichte Rohre(5384)
- Optik-Objektive(4951)
- LEDs-Spacer, Unentschieden(2718)
- LEDs-Lamp-Ersetzungen(29718)
- LEDs - Leiterplattenindikatoren, Arrays, Lichtstäbe, Balkendiagramme(9083)
- LED-thermische Produkte(667)
- LED-Beleuchtung(64)
- LED-Beleuchtung-weiß(37580)
- LED-Beleuchtung-Farbe(4728)
- LED-Beleuchtung-Maiskolben, Motoren, Module(28735)
- LED-Anzeige-diskret(27601)
- Laserdioden, Module(1553)
- Lampen-Glühlampen, Neons(311004)
- Lampen-Kälte-Fluoreszenz (KKL) & UV(164)
- Wechselrichter(7728)
- Infrarot, UV, sichtbare Strahler(3871)
- Fiber Optics-Transmitter-Antrieb integriert(4085)
- Fiber Optics-Transmitter-diskrete(350)
- Fiber Optics-Transceiver Module(18758)
- Fiberoptik-Switches, Multiplexer, Demultiplexer(1387)
- Fiberoptik-Receiver(695)
- Fiberoptik-Dämpfung(654)
- Elektrolumineszenz(102)
- Display, Monitor-Interface Controller(98)
- Display-Module-Vakuum-Leuchtstofflampen (VFD)(249)
- Module anzeigen-LED Dot Matrix und Cluster(865)
- Display-Module-LED-Zeichen und numerische(5421)
- Display-Module-LCD, OLED, Graphic(4654)
- Display-Module-LCD, OLED-Zeichen und numerische(2202)
- Display-Blenden, Objektive(88)
- Adresse, Spezialität(458)
Relevanter Hersteller







-
Sensoren, Wandler
Sensoren, Wandler
- Ultraschallempfänger, Sender - Industrial(115)
- Temperatursensoren - Thermostate - Mechanisch - Industrielles(3103)
- Temperatursensoren - Analog und digitaler Ausgang - Industrial(209)
- Näherungssensoren - Industrial(13611)
- Drucksensoren, Wandler - Industrie(26503)
- Optische Sensoren - Photonik - Zähler, Detektoren, SPCM (Einzelphotonzählmodul)(751)
- Optische Sensoren - Kameramodule(875)
- Magnetsensoren - Position, Nähe, Geschwindigkeit (Module) - Industrie(554)
- Kraftsensoren - Industrial(346)
- Flusssensoren - Industrielles(151)
- Float, Level Sensoren - Industrial(310)
- Encoder - Industrial(4980)
- Farbsensoren - Industrial(50)
- Berührungssensoren(100)
- Ultraschall-Receiver, Transmitter(2421)
- Temperatursensoren-Thermostat-Solid State(1096)
- Temperatursensoren-Thermostate-mechanisch(3397)
- Temperatursensoren - Thermoelemente, Temperatursonden(1921)
- Temperatursensoren - RTD (Widerstandstemperaturdetektor)(1525)
- Temperatursensoren-PTC-Thermistoren(2273)
- Temperatursensoren-ntc-thermistoren(13259)
- Temperatursensoren-Analog und Digital Output(3928)
- DMS(1399)
- Spezialisierte Sensoren(1861)
- Solarzellen(503)
- Schock-Sensoren(84)
- Sensor-Interface-Junction-Blöcke(2519)
- Sensor-Kabel-Baugruppen(22011)
- Proximity/Belegung Sensoren-fertige Einheiten(725)
- Näherungsschalter(2860)
- Drucksensoren, Wandler(11317)
- Positionssensoren - Winkel, lineare Positionsmessung(6022)
- Optische Sensoren-reflektierende-Logik-Ausgang(194)
- Optische Sensoren - reflektierend - analoge Ausgang(432)
- Optische Sensoren-Phototransistoren(1027)
- Optische Sensoren - Photointerrupter - Schlitztyp - Transistorausgang(1427)
- Optische Sensoren - Photointerrupter - Schlitztyp - Logikausgabe(1215)
- Optische Sensoren-Lichtschranke, Industrial(16763)
- Optische Sensoren-Photodioden(1543)
- Optische Sensoren-Foto-Detektoren-Remote Receiver(2605)
- Optische Sensoren-Foto-Detektoren-Logik-Ausgang(146)
- Optische Sensoren-Foto-Detektoren-CDs-Zellen(74)
- Optische Sensoren-Distanz-Messung(377)
- Optische Sensoren-Ambient Light, IR, UV Sensoren(1305)
- Multifunktions(558)
- Motion Sensors-Vibration(337)
- Motion Sensors-Tilt Schalter(67)
- Bewegungsmelder-optisch(719)
- Motion Sensors-Neigungssensoren(175)
- Motion Sensors-Imus (Trägheit-Maßeinheiten)(416)
- Motion Sensors-Kreisel(214)
- Motion Sensors-Beschleunigungsmesser(1911)
- Magnete-Sensor abgestimmt(119)
- Magnete-Multi Purpose(1965)
- Magnetische Sensoren-Schalter (Solid State)(3700)
- Magnetsensoren - Position, Nähe, Geschwindigkeit (Module)(5199)
- Magnetische Sensoren-linear, Kompass (ICS)(1247)
- Magnetsensoren - Kompass, Magnetfeld (Module)(35)
- LVDT -Wandler (linearer variabler Differentialtransformator)(204)
- IrDA Transceiver-Module(196)
- Bildsensor, Kamera(2235)
- Feuchtigkeit-Sensoren(1425)
- Gas-Sensoren(1217)
- Force Sensoren(188)
- Durchfluss-Sensoren(550)
- Float, Level Sensoren(1343)
- Encoder(6357)
- Staub-Sensoren(43)
- Aktuelle Wandler(3455)
- Color Sensoren(85)
- Verstärker(1905)
Relevanter Hersteller







-
Anschlüsse, Verbindungen
Anschlüsse, Verbindungen
- USB, DVI, HDMI -Stecker(446)
- Festkörperbeleuchtungsstecker(555)
- Steckdosen für ICs, Transistoren(953)
- Steckbare Steckverbinder(1221)
- Photovoltaik (Solarpanel) Anschlüsse(136)
- Glasfaseranschlüsse(370)
- FFC, FPC (flache flexible) Anschlüsse(761)
- D-Sub, D-förmige Stecker(2887)
- Koaxialverbinder (RF)(2389)
- Rundanschlüsse(14162)
- Stromanbeter Blade Type(273)
- Stecker und Behälter(2597)
- USB, DVI, HDMI Stecker-Adapter(572)
- USB, DVI, HDMI -Stecker(4298)
- Klemmen-Wire to Board Steckverbinder(217)
- Klemmen-Draht-Steckverbinder(4322)
- Klemmen-Draht-Pin Stecker(328)
- Terminals-Revolver Steckverbinder(1273)
- Terminals-spezialisierte Steckverbinder(2042)
- Klemmen-Spaten Verbinder(3902)
- Klemmen-Löten/Stecker(345)
- Klemmen-Verschraubungen(745)
- Klemmen-Ring Steckverbinder(12596)
- Klemmen-rechteckige Steckverbinder(4747)
- Terminals - Schnellverbindungen, schnelle Trennungsanschlüsse(8514)
- Klemmen-PC PIN, Single Post Connectors(3776)
- Klemmen-PC-Pin-Buchsen, Sockel-Steckverbinder(5883)
- Klemmen-magnetische Draht-Steckverbinder(1653)
- Klemmen-Messer Steckverbinder(112)
- Klemmen-Gehäuse, Stiefel(2850)
- Klemmen-Folie Steckverbinder(108)
- Klemmen-Barrel, Bullet-Steckverbinder(1107)
- Klemmen-Adapter(137)
- Terminal-Streifen und Revolver-Boards(1159)
- Terminal Junction Systeme(2533)
- Anschlussblöcke-Draht an Bord(43615)
- Terminal Blocks-spezialisierte(3722)
- Terminal Blocks-Power Distribution(847)
- Anschlussblöcke-Panel Mount(1359)
- Terminal Blocks-Interface Module(1819)
- Anschlussblöcke-Kopfzeilen, Stecker und Buchsen(119920)
- Anschlussblöcke-DIN-Schiene, Kanal(9373)
- Anschlussblöcke-Kontakte(65)
- Anschlussblöcke-Barrier Blocks(47517)
- Anschlussblöcke-Adapter(1059)
- Solid State Lighting Verbinder-Kontakte(271)
- Festkörperbeleuchtungsstecker(1344)
- Buchsen für ICS, Transistoren-Adapter(275)
- Steckdosen für ICs, Transistoren(22148)
- Shunts, Jumper(907)
- Rechteckige Verbinder-Feder geladen(7721)
- Rechteckige Steckverbinder-Gehäuse(43023)
- Rechteckige Verbinder-Kopfzeilen, Spezial-PIN(6129)
- Rechteckige Anschlüsse - Header, Gefäße, weibliche Sockel(229601)
- Rechteckige Verbinder-Kopfzeilen, männliche Pins(543338)
- Rechteckige Anschlüsse - kostenloses Hängen, Panelhalterung(30142)
- Rechteckige Verbinder-Kontakte(10681)
- Rechteckige Anschlüsse - Board in, Direktdraht zum Board(2432)
- Rechteckige Verbinder-Adapter(475)
- Rechteckig - Brett zu Board -Steckern - Header, Behälter, weibliche Sockel(9)
- Rechteckig - Brett zu Board -Steckern - Header, männliche Stifte(2)
- Rechteckige Anschlüsse - Board -Abstandshalter, Stacker (Board zu Board)(238901)
- Rechteckige Anschlüsse - Arrays, Kantentyp, Mezzanin (Board zu Board)(37853)
- Stromanschluss-Eingänge, Steckdosen, Module(10310)
- Steckbare Steckverbinder(6049)
- Photovoltaik- (Solarpanel) Anschlüsse - Kontakte(77)
- Photovoltaik (Solarpanel) Anschlüsse(504)
- Modulare Steckverbinder-Verdrahtung Blöcke(99)
- Modulare Steckverbinder-Stecker(1674)
- Modulare Steckverbinder-Stecker Gehäuse(181)
- Modulare Steckverbinder-Buchsen mit magnetischen(10152)
- Modulare Steckverbinder-Buchsen(23416)
- Modulare Steckverbinder-Adapter(855)
- Memory Connectors-PC Cards-Adapter(21)
- Memory Connectors-PC Card Sockets(3299)
- Memory Connectors-Inline Modul Sockets(3390)
- LGH Steckverbinder(764)
- Keystone-Einsätze(2758)
- Keystone-Frontplatte, Frames(1926)
- Heavy Duty Steckverbinder-Einsätze, Module(4190)
- Schwerlastanschlüsse - Gehäuse, Kapuzen, Basen(17226)
- Heavy Duty Steckverbinder-Frames(523)
- Heavy Duty Steckverbinder-Kontakte(1832)
- Heavy Duty Steckverbinder-Baugruppen(671)
- LWL-Steckverbinder-Gehäuse(919)
- Glasfaser-Steckverbinder - Adapter(4455)
- LWL-Steckverbinder(3001)
- FFC, FPC (flache flexible) Steckverbinder - Gehäuse(652)
- FFC, FPC (flache flexible) Anschlüsse - Kontakte(202)
- FFC, FPC (flache flexible) Anschlüsse(18691)
- D-Sub, d-förmige Steckverbinder-Terminatoren(47)
- D-Sub, d-förmige Steckverbinder-Gehäuse(12238)
- D-Sub, d-förmige Steckverbinder-Kontakte(2714)
- D-Sub, D-förmige Steckverbinder-Rückenschalen, Kapuzen(5995)
- D-Sub, d-förmige Steckverbinder-Adapter(1304)
- D-Sub Steckverbinder(141346)
- D-förmige Steckverbinder-Centronics(8770)
- Kontakte, Frühling geladen und Druck(630)
- Kontakte-Multi Purpose(6196)
- Kontakte-"Leadframe"(122)
- Koaxial-Steckverbinder (RF)-Terminatoren(1231)
- Koaxial-Steckverbinder (RF)-Kontakte(480)
- Koaxial-Steckverbinder (RF)-Adapter(6386)
- Koaxialverbinder (RF)(25734)
- Rundsteckverbinder-Gehäuse(441226)
- Rundsteckverbinder-Kontakte(4737)
- Rundsteckverbinder-backschalen und Kabel-Klemmen(53692)
- Rundsteckverbinder-Adapter(8839)
- Rundanschlüsse(1196254)
- Card Edge Steckverbinder-Gehäuse(469)
- Karte Edge Verbinder-edgeboard Verbinder(672683)
- Card Edge Verbinder-Kontakte(325)
- Card Edge Verbinder-Adapter(73)
- Blade Type Power Steckverbinder-Gehäuse(837)
- Blade Type Power Connectors-Kontakte(393)
- Stromanbeter Blade Type(4163)
- Zwischen Serien-Adapter(649)
- Barrel-Stromanschluss(935)
- Barrel-Audio-Anschlüsse(2432)
- Barrel-Audio Adapter(92)
- Banana und Tip Steckverbinder-Buchsen, Stecker(1644)
- Banana and Tip Connectors-Binding Posts(239)
- Banana und Tip Steckverbinder-Adapter(75)
- Backplane Steckverbinder-spezialisiert(45586)
- Backplane Steckverbinder-Gehäuse(6863)
- Backplane Steckverbinder-Hard metrisch, Standard(6297)
- Backplane Steckverbinder-DIN 41612(9408)
- Backplane Steckverbinder-Kontakte(3583)
- Backplane Connectors-ARINC Einsätze(2357)
- Backplane Steckverbinder-ARINC(3789)
Relevanter Hersteller







-
Widerstände
-
Kondensatoren
Kondensatoren
- Aluminium-Elektrolytkondensatoren(16817)
- Trimmer, Variable Kondensatoren(3151)
- Dünne Folien-Kondensatoren(3473)
- Tantal-Kondensatoren(136103)
- Tantal-Polymer-Kondensatoren(9778)
- Silizium-Kondensatoren(320)
- Niob Oxide Kondensatoren(330)
- Mica und PTFE Kondensatoren(9101)
- Folien-Kondensatoren(150406)
- Elektrische Doppelschichtkondensatoren (EDLC), Superkondensatoren(2782)
- Keramische Kondensatoren(833829)
- Kondensatoren-Netzwerke, Arrays(2383)
- Aluminium-Elektrolytkondensatoren(125325)
- Aluminium-Polymer-Kondensatoren(7544)
Relevanter Hersteller






-
Transformatoren
Transformatoren
Relevanter Hersteller







-
Isolatoren
-
Kristalle, Oszillatoren, Resonatoren
Kristalle, Oszillatoren, Resonatoren
Relevanter Hersteller






-
Switches
Switches
- Verriegelungsschalter(2893)
- Emergency-Stop-Schalter (E-Stop)(1160)
- Kabelzugschalter(571)
- Toggle-Schalter(33608)
- Rändelrads Schalter(742)
- Schalter(14263)
- Snap-Aktion, Endschalter begrenzen(28077)
- Slide-Schalter(5166)
- Selector-Schalter(9720)
- Rotary Switches(13850)
- Rocker Schalter(53790)
- Drucktaste-Schalter-Hall-Effekt(127)
- Drucktaste Schalter(190826)
- Programmierbare Display-Switches(39)
- Navigations-Schalter, Joystick(1882)
- Magnetische, Reed-Schalter(1399)
- Keypad-Schalter(637)
- Keylock Schalter(3684)
- DIP Schalter(7747)
- Konfigurierbare Switch-Komponenten-Objektiv(1435)
- Konfigurierbare Schalter-Komponenten-Lichtquelle(1236)
- Konfigurierbare Switch-Komponenten-Contact Block(1401)
- Konfigurierbare Switch-Komponenten-Body(16077)
- Disconnect-Switch-Komponenten(2567)
Relevanter Hersteller






-
Relais
Relais
- Sicherheitsrelais(1310)
- Reedrelais(1735)
- Hochfrequenz (RF) -Relais(1190)
- Schütze (Festkörper)(686)
- Schütze (elektromechanisch)(11952)
- Kfz-Relais(1881)
- Solid State Relais(10652)
- Signal-Relais, bis zu 2 Ampere(9149)
- Relay-Sockets(2075)
- Power Relays, über 2 Ampere(31604)
- E / A-Relaismodule(712)
- I/o-Relay-Module-Input(2)
- I/o-Relay-Modul-Racks(247)
Relevanter Hersteller
















Sprache auswählen
Aktuelle Sprache
Deutsch
- English
- Deutsch
- Italia
- Français
- 日本語
- 한국의
- русский
- Svenska
- Nederland
- español
- Português
- polski
- Suomi
- Gaeilge
- Slovenská
- Slovenija
- Čeština
- Melayu
- Magyarország
- Hrvatska
- Dansk
- românesc
- Indonesia
- Ελλάδα
- Български език
- Afrikaans
- IsiXhosa
- isiZulu
- lietuvių
- Maori
- Kongeriket
- Монголулс
- O'zbek
- Tiếng Việt
- हिंदी
- اردو
- Kurdî
- Català
- Bosna
- Euskera
- العربية
- فارسی
- Corsa
- Chicheŵa
- עִבְרִית
- Latviešu
- Hausa
- Беларусь
- አማርኛ
- Republika e Shqipërisë
- Eesti Vabariik
- íslenska
- မြန်မာ
- Македонски
- Lëtzebuergesch
- საქართველო
- Cambodia
- Pilipino
- Azərbaycan
- ພາສາລາວ
- বাংলা ভাষার
- پښتو
- malaɡasʲ
- Кыргыз тили
- Ayiti
- Қазақша
- Samoa
- සිංහල
- ภาษาไทย
- Україна
- Kiswahili
- Cрпски
- Galego
- नेपाली
- Sesotho
- Тоҷикӣ
- Türk dili
- ગુજરાતી
- ಕನ್ನಡkannaḍa
- मराठी
L298 Motor Driver IC Arbeitsprinzip, Schaltungen und Datenblätter
Zeit: 2026/06/25
Durchsuchen: 6
Der L298 ist ein Dual-H-Brücken-Motortreiber-IC, das zur Steuerung von DC-Motoren, bipolarer Schrittmotoren und anderen induktiven Lasten entwickelt wurde. Der L298 ist in mehreren Gehäuseversionen erhältlich, wobei der L298N am häufigsten verwendet wird. Die Bezeichnung "N" bezieht sich auf das Multiwatt-15-Gehäuse, das für eine höhere Leistungsaufnahme und eine einfache Kühlkörpermontage ausgelegt ist. Dieser Artikel erklärt, wie der L298 funktioniert, seine Pin-Funktionen, elektrische Spezifikationen, unterstützte Motortypen, typische Schaltungen, den Vergleich mit modernen Motortreibern und gängige Anwendungen.


Katalog
Wie der L298-Motortreiber funktioniert
Der L298 steuert DC-Motoren und Schrittmotoren mithilfe von zwei unabhängigen H-Brücken-Schaltungen, die im Blockdiagramm als Kanal A und Kanal B gekennzeichnet sind. Jede H-Brücke erhält Logiksignale von den Eingangs-Pins und schaltet das interne Transistornetzwerk, um die Richtung des durch den Motor fließenden Stroms zu steuern.
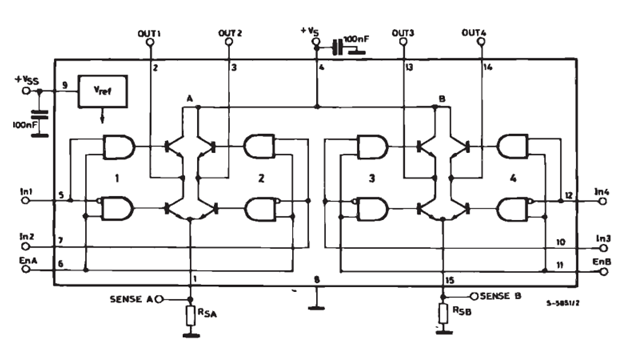
Wie im Blockdiagramm dargestellt, steuern IN1 und IN2 Kanal A, während IN3 und IN4 Kanal B steuern. Wenn ein Eingang HIGH und der andere LOW ist, schafft die H-Brücke einen Stromkreis durch den Motor, wodurch dieser rotiert. Über das Umkehren der Eingangszustände wird die Stromrichtung umgekehrt und die Rotationsrichtung des Motors verändert.
Die Pins ENA und ENB aktivieren oder deaktivieren jede H-Brücke. Diese Pins werden häufig von einem PWM-Signal eines Mikrocontrollers angesteuert. Durch Anpassen des PWM-Tastverhältnisses ändert sich die durchschnittliche Spannung, die dem Motor zugeführt wird, was eine Geschwindigkeitsregelung ermöglicht.
Die Motorstromversorgung erfolgt über den +Vs-Pin, während die interne Logik von +Vss betrieben wird. Die SENSE A- und SENSE B-Pins können an externe Widerstände angeschlossen werden, um den Motorstrom zum Schutz oder zur Regelung zu überwachen.
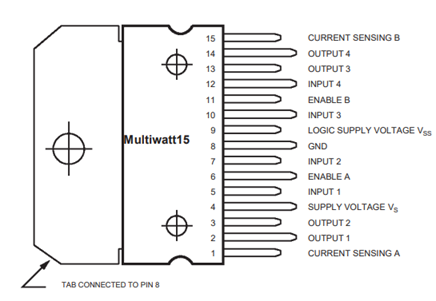
L298-Pinbelegung und Pin-Funktionen
| Pin Nr. |
Pin Name |
Funktion |
| 1 |
Sense A |
Verbindung zur Strommessung für Kanal A. Typischerweise an einen niederohmigen Widerstand zur Stromüberwachung angeschlossen. |
| 2 |
OUT1 |
Ausgangsanschluss 1 der H-Brücke A, der mit dem Motor verbunden ist. |
| 3 |
OUT2 |
Ausgangsanschluss 2 der H-Brücke A, der mit dem Motor verbunden ist. |
| 4 |
Vs |
Eingang für die Motorstromversorgungsspannung. Versorgt die Ausgangsstufe mit Strom. |
| 5 |
IN1 |
Logiksteuerungseingang 1 für H-Brücke A. Arbeiten mit IN2 zur Steuerung der Motordrehung. |
| 6 |
ENA |
Aktivierungseingang für H-Brücke A. Wird verwendet, um den Kanal zu aktivieren/deaktivieren und für die PWM-Geschwindigkeitsregelung. |
| 7 |
IN2 |
Logiksteuerungseingang 2 für H-Brücke A. Arbeiten mit IN1 zur Steuerung der Motordrehung. |
| 8 |
GND |
Erdungsanschluss für sowohl Logik- als auch Stromkreise. Die Metallplatte ist ebenfalls an diesen Pin angeschlossen. |
| 9 |
Vss |
Eingang für die Logikversorgungsspannung, typischerweise 5 V. Versorgt die interne Steuerungsschaltung mit Strom. |
| 10 |
IN3 |
Logiksteuerung Eingang 1 für H-Brücke B. Funktioniert mit IN4 zur Steuerung der Motorrichtung. |
| 11 |
ENB |
Aktivierungseingang für H-Brücke B. Wird verwendet, um den Kanal ein- oder auszuschalten und zur PWM-Drehzahlregelung. |
| 12 |
IN4 |
Logiksteuerung Eingang 2 für H-Brücke B. Funktioniert mit IN3 zur Steuerung der Motorrichtung. |
| 13 |
OUT3 |
Ausgangsterminal 1 der H-Brücke B, verbunden mit dem Motor. |
| 14 |
OUT4 |
Ausgangsterminal 2 der H-Brücke B, verbunden mit dem Motor. |
| 15 |
Sense B |
Anschluss zur Strommessung für Kanal B. Typischerweise mit einem niederohmigen Widerstand zur Stromüberwachung verbunden. |
Wichtige elektrische Spezifikationen des L298
| Spezifikation |
Wert |
Einheit |
| Motorversorgungsspannung (Vs) |
Bis zu 46 (50 V absolut maximal) |
V |
| Logikversorgungsspannung (Vss) |
4.5 bis 7 (5 V typisch) |
V |
| Logikeingangsspannung (HIGH) |
≥ 2.3 |
V |
| Logikeingangsspannung (LOW) |
≤ 1.5 |
V |
| Dauerstromausgang (pro Kanal) |
2 |
A |
| Wiederholbarer Spitzenstromausgang |
2.5 |
A |
| Nicht-wiederholbarer Spitzenstromausgang |
3 |
A |
| Gesamtleistungsabgabe |
25 |
W |
| Ruhestromversorgung (Vs) |
13–70 |
mA |
| Ruhestromversorgung (Vss) |
6–36 |
mA |
| Strommessspannungsbereich |
-1 bis 2.3 |
V |
| Ausgangsspannungsabfall (1 A Last) |
1.8–3.2 |
V |
| Ausgangsspannungsabfall (2 A Last) |
4.9 maximal |
V |
| Sättigungsspannung des Outputs (1 A) |
1.35 typisch |
V |
| Sättigungsspannung des Outputs (2 A) |
2.0 typisch |
V |
| Sättigungsspannung des Senkens (1 A) |
1.2 typisch |
V |
| Sättigungsspannung des Senkens (2 A) |
1.7 typisch |
V |
| Maximale Kommutierungsfrequenz |
25–40 |
kHz |
| Einschaltverzögerung der Quelle |
2 |
µs |
| Ausschaltverzögerung der Quelle |
1.5 |
µs |
| Anstiegszeit der Quelle |
0.7 |
µs |
| Fallzeit der Quelle |
0.2 |
µs |
| Einschaltverzögerung des Senkens |
1.6 |
µs |
| Ausschaltverzögerung des Senkens |
0.7 |
µs |
| Anstiegszeit des Senkens |
0.2 |
µs |
| Fallzeit des Senkens |
0.25 |
µs |
| Betriebstemperaturbereich |
-25 bis +130 |
°C |
| Lagertemperaturbereich |
-40 bis +150 |
°C |
Welche Motoren kann der L298 antreiben?
Der L298 ist darauf ausgelegt, verschiedene Systeme mit Bürstenmotoren über seine Dual-H-Brücken-Architektur anzutreiben. Jede H-Brücke kann unabhängig die Richtung und Geschwindigkeit einer angeschlossenen Last steuern, sodass der IC zwei Gleichstrommotoren gleichzeitig oder einen einzelnen bipolaren Schrittmotor betreiben kann.
Gleichstrommotoren mit Bürsten
Gleichstrommotoren mit Bürsten sind die häufigsten Motoren, die vom L298 betrieben werden. Der IC kann sowohl die Drehrichtung als auch die Geschwindigkeit eines Gleichstrommotors steuern, indem er den Stromfluss durch die Ausgänge seiner H-Brücke umschaltet. Eine einzelne L298 kann einen größeren Gleichstrommotor über einen Kanal oder zwei separate Gleichstrommotoren durch die Nutzung beider H-Brücken-Kanäle antreiben.
Bipolare Schrittmotoren
Der L298 kann 2-phasige bipolare Schrittmotoren antreiben, indem er seine beiden H-Brücken-Kanäle zur Steuerung der beiden Wicklungen des Motors verwendet. Durch die gezielte Ansteuerung der Wicklungen in einer bestimmten Reihenfolge dreht sich der Motor in präzisen Winkelschritten und nicht durch kontinuierliche Rotation. Dies ermöglicht eine genaue Steuerung von Position, Geschwindigkeit und Bewegungsrichtung.
Linearantriebe und kleine Roboterantriebe
Viele DC-Linearantriebe verwenden einen internen Gleichstrommotor mit Bürsten, was sie mit dem L298 kompatibel macht. Durch die Steuerung der Motorrichtung über die H-Brücke kann der Aktuator nach Bedarf ausfahren oder einfahren. Dies macht den L298 nützlich für Anwendungen wie automatisierte Türen, einstellbare Plattformen, Ventile und einfache industrielle Steuerungssysteme.
Typische L298-Anwendungsschaltungen
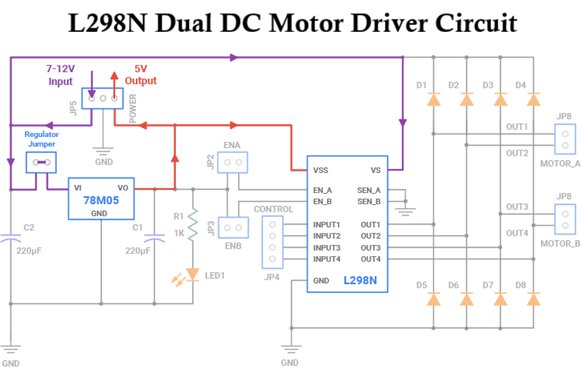
L298N Dual-Gleichstrommotorantriebsschaltung
Die Schaltung verwendet den L298N IC, um zwei Gleichstrommotoren zu steuern. Eine 7–12V-Versorgung speist die Motoren über den VS-Pin, während der 78M05-Regler diesen Eingang in 5V für den Logikbereich des L298N über den VSS-Pin umwandelt.
Der L298N enthält zwei interne H-Brücken-Schaltungen. Diese ermöglichen den Stromfluss durch jeden Motor in beide Richtungen, sodass die Motoren vorwärts oder rückwärts rotieren können. OUT1 und OUT2 steuern Motor A, während OUT3 und OUT4 Motor B steuern.
Die Eingangs-Pins INPUT1 bis INPUT4 empfangen Signale von einem Mikrocontroller. Diese Signale bestimmen die Motorrichtung. Die Pins ENA und ENB aktivieren jeden Motor-Kanal und können auch PWM-Signale empfangen, um die Motorgeschwindigkeit zu steuern.
Die Kondensatoren helfen, die Stromversorgung zu stabilisieren, während die Dioden den IC vor Back-EMF-Spannungsspitzen schützen, die von den Motoren erzeugt werden. Insgesamt ermöglicht dieser Schaltkreis einem stromsparenden Controller, zwei Gleichstrommotoren sicher zu betreiben und zu steuern.
Bipolarer Schrittmotortreiber-Schaltkreis mit L297 und L298
Dieser Schaltkreis kombiniert den L297 Schrittmotorcontroller und den L298N dualen H-Brücken-Motortreiber, um einen zwei-phasigen bipolaren Schrittmotor zu steuern. Der L297 erzeugt die richtige Phasenfolge, die für den Betrieb des Schrittmotors erforderlich ist, während der L298N den höheren Strom liefert, der benötigt wird, um die Motorwicklungen anzutreiben.
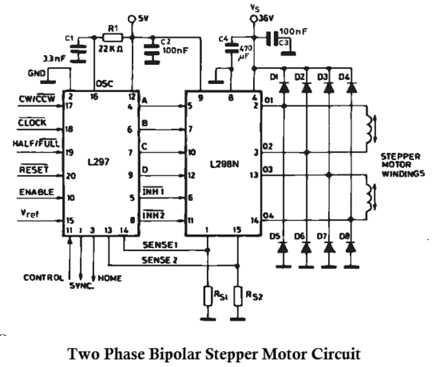
Der L297 erhält Steuersignale wie CLOCK, CW/CCW, HALF/FULL, RESET und ENABLE. Basierend auf diesen Eingaben erzeugt er vier Ausgangssignale (A, B, C und D), die die Schrittfolge bestimmen. Der CLOCK-Eingang steuert die Schrittgeschwindigkeit, während der CW/CCW-Eingang die Drehrichtung auswählt. Der HALF/FULL-Eingang ermöglicht es dem Motor, entweder im Halbschritt- oder im Vollschrittmodus zu arbeiten.
Die Ausgangssignale vom L297 sind mit den Eingangs-Pins des L298N verbunden. Der L298N fungiert als dualer H-Brückentreiber und schaltet den Strom durch die beiden Motorwicklungen. Indem die Wicklungen in der richtigen Sequenz aktiviert werden, rotiert der Motor Schritt für Schritt mit präziser Positionskontrolle.
Die Widerstände RS1 und RS2, die mit den SENSE-Pins verbunden sind, sind Strommesswiderstände. Sie ermöglichen es dem L297, den Motorstrom zu überwachen und eine Stromregelung durch seine interne Chopper-Steuerungsfunktion zu implementieren. Dies hilft, übermäßigen Strom zu vermeiden und die Effizienz des Motors zu verbessern.
Die Dioden D1–D8 sind Freilaufdioden, die den L298N vor Spannungsspitzen schützen, die von den induktiven Motorwicklungen erzeugt werden. Die Kondensatoren in der Nähe der Stromversorgung helfen, Rauschen zu filtern und die Betriebsspannung zu stabilisieren.
L298 vs Moderne Motortreiber-ICs
| Daten |
L298 |
L293D |
TB6612FNG |
DRV8833 |
BTS7960 |
| Treiber Typ |
Bipolarer Transistor |
Bipolarer Transistor |
MOSFET |
MOSFET |
MOSFET |
| Motor Kanäle |
2 Gleichstrommotoren |
2 Gleichstrommotoren |
2 Gleichstrommotoren |
2 Gleichstrommotoren |
1 Gleichstrommotor |
| Dauerstrom |
2A/Kanal |
600mA/Kanal |
1.2A/Kanal |
1.5A/Kanal |
43A |
| Spitzenstrom |
3A |
1.2A |
3.2A |
2A |
43A+ |
| Motorspannung |
Bis zu 46V |
Bis zu 36V |
Bis zu 13.5V |
2.7V–10.8V |
Bis zu 27V |
| Logikspannung |
5V |
5V |
2.7V–5.5V |
2.7V–7V |
3.3V–5V |
| Schutzdioden |
Extern erforderlich |
Eingebaut |
Eingebaut |
Eingebaut |
Eingebaut |
| Hauptverwendung |
Mittlere Gleichstrommotoren |
Kleine Gleichstrommotoren |
Kleine Roboter |
Niedervolt-Roboter |
Hochstrom Gleichstrommotoren |
Häufige Anwendungen des L298
Gleichstrommotorsteuerung
Der L298 wird häufig verwendet, um einen oder zwei Gleichstrommotoren mit Bürsten zu steuern. Er kann die Motordrehung durch Umkehren des Stromflusses ändern und die Motorgeschwindigkeit mit PWM-Signalen von einem Mikrocontroller steuern.
Bipolare Schrittmotorsteuerung
Der L298 kann einen zwei-phasigen bipolaren Schrittmotor antreiben, indem er Strom in der richtigen Sequenz an seine Wicklungen liefert. Für eine einfachere Schrittsteuerung wird er oft mit einem L297-Controller verwendet.
Bildungsrobotik
Der L298 wird häufig in Roboter-Kits und Schülerprojekten verwendet, da er einfach mit Arduino und anderen Mikrocontrollern zu verbinden ist. Er hilft Lernenden, die Steuerung der Motorrichtung, die Geschwindigkeitssteuerung und den Betrieb von H-Brücken zu verstehen.
Kleine Automatisierungssysteme
Der L298 kann Motoren in einfachen automatisierten Systemen wie kleinen Förderbändern, Schiebemechanismen und motorisierten Plattformen steuern. Er ist nützlich, wenn ein Projekt Vorwärts- und Rückwärtsbewegung benötigt.
Positionierungsmechanismen
Der L298 kann in Kamera-Schwenk- und Neigemechanismen, kleinen CNC-Achsen und anderen Positionierungsgeräten verwendet werden. In diesen Anwendungen steuert er Gleichstrommotoren oder Schrittmotoren, um eine Last in eine erforderliche Position zu bewegen.
Prototyp-Motortreiber-Schaltungen
Ingenieure und Hobbyisten verwenden den L298 in Prototypenschaltungen, da er einfach zu testen, weit verbreitet und unterstützt separate Logik- und Motorversorgungen. Dies macht ihn nützlich für frühe Experimente im Motorsteuerungsdesign.
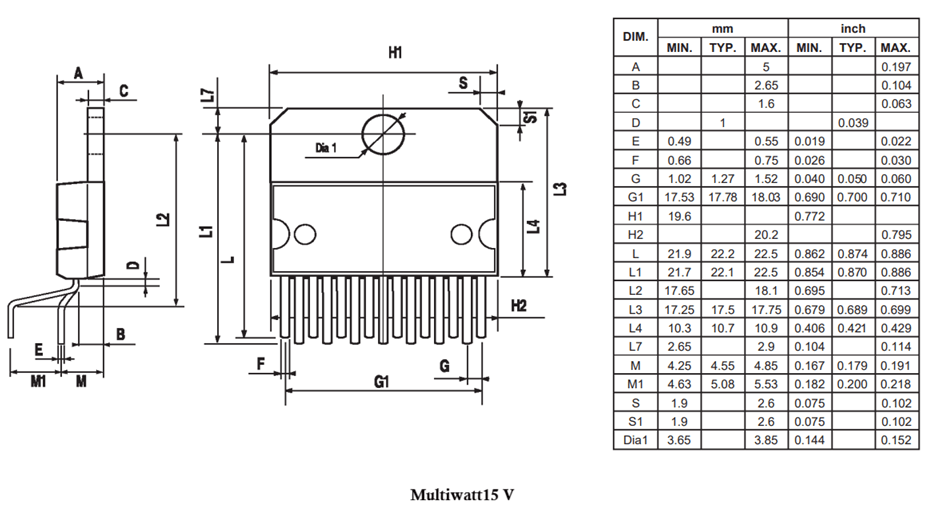
Mechanische Abmessungen
Fazit
Der L298 Dual-Full-Bridge-Treiber-IC mit dualem H-Brücken-Design macht ihn flexibel genug, um zwei bürstenbehaftete Gleichstrommotoren oder einen bipolar betriebenen Schrittmotor zu steuern, während seine Aktivierungspins eine einfache Geschwindigkeitsregelung durch PWM ermöglichen. Obwohl neuere treiberbasierte MOSFETs effizienter, kleiner und kühler sind, bleibt der L298 nützlich, da er einfach zu verstehen, weit verbreitet und geeignet für Bildungsrobotik, Prototypen, kleine Automatisierungssysteme und allgemeine Motorsteuerungsschaltungen ist.
Häufig gestellte Fragen [FAQ]
1. Warum benötigt der L298 eine separate Logikversorgung (Vss) und Motorversorgung (Vs)?
Der L298 trennt die Logik- und Motorstromabschnitte, um die Zuverlässigkeit zu verbessern. Die Logikversorgung versorgt die interne Steuerelektronik, während die Motorversorgung die H-Brücken-Ausgänge versorgt. Dies verhindert, dass Spannungsfluktuationen und elektrisches Geräusch der Motoren die Steuersignale stören.
2. Warum erzeugt der L298 mehr Wärme als moderne Motortreiber-ICs?
Der L298 verwendet die Bipolartransistor-Technologie, die einen höheren Spannungsabfall über der Ausgangsstufe hat. Dies führt dazu, dass mehr Leistung in Wärme umgewandelt wird. Moderne treiberbasierte MOSFETs haben geringere Verluste und arbeiten daher effizienter.
3. Wie funktioniert die PWM-Geschwindigkeitsregelung mit dem L298?
PWM schaltet den ENA- oder ENB-Pin schnell ein und aus. Durch Ändern des Tastverhältnisses des PWM-Signals ändert sich die durchschnittliche Spannung, die an den Motor geliefert wird, wodurch eine sanfte Geschwindigkeitsregelung ohne Änderung der Versorgungsspannung ermöglicht wird.
4. Warum sind Strommesspins im L298 enthalten?
Die Pins Sense A und Sense B ermöglichen externe Widerstände zur Messung des Motorstroms. Diese Funktion kann für den Überstromschutz, die Strombegrenzung, die Motorüberwachung und geschlossene Regelkreismotorsteuerungssysteme genutzt werden.
5. Welche Faktoren bestimmen, ob ein Motor für den L298 geeignet ist?
Die wichtigsten Faktoren sind Motorspannung, dauerhafter Strom, Anlaufstrom und Stillstandsstrom. Die Stromanforderungen des Motors müssen innerhalb der Betriebsgrenzen des L298 bleiben, um Überhitzung oder Schäden zu vermeiden.
6. Kann der L298 in batteriebetriebenen Geräten verwendet werden?
Ja, aber es ist nicht immer die effizienteste Wahl. Aufgrund seiner höheren Leistungsverluste verbraucht der L298 mehr Energie als treiberbasierte MOSFETs, was die Batterielebensdauer in tragbaren Anwendungen reduzieren kann.
7. Warum sind Freilaufdioden in L298-Motorstromkreisen wichtig?
Motoren sind induktive Lasten, die Spannungsspitzen erzeugen, wenn sich der Strom plötzlich ändert. Freilaufdioden leiten diese Energie sicher um und schützen den L298 vor potenziell schädlichen Rück-EMF-Spannungen.
Verwandter Artikel
-
![Apple M1 Ultra Architektur, Leistung und UltraFusion-Technologie]() Jun 25 2026
Jun 25 2026

Verwandte -Produkte

GJM0335C1E2R0CB01D
CAP CER 2PF 25V C0G/NP0 0201

C2012X5R1A685M085AB
CAP CER 6.8UF 10V X5R 0805

GRM0225C1E7R0WDAEL
CAP CER 7PF 25V C0G/NP0 01005

CGA5F1X7S3D101K085AA
CAP CER 100PF 2KV X7S 1206

FC0H473ZFTBR24
CAP 47MF -20% +80% 5.5V SMD

TPSE686K025R0200
CAP TANT 68UF 10% 25V 2917

AT25256B-SSHL-T
IC EEPROM 256KBIT SPI 8SOIC

FZ1200R33KF
IGBT Modules

VI-910397
IGBT Modules

TC3162LE-LQ128G-M
TRENDCH LQFP128
HD647180X0FS6
HD647180X0FS6 HITACHI

T491C475K025AT4659
CAP TANT 4.7UF 10% 25V 2312
