Alle Kategorien
-
Integrierte schaltkreise (ICS)
Integrierte schaltkreise (ICS)
- Schnittstelle - Sensor, kapazitive Berührung(642)
- Spezialisierte ICS(12302)
- PMIC-Spannungsregler-besonderer Zweck(5644)
- PMIC-Spannungsregler-lineare Regler(793)
- PMIC-Spannungsregler-linear + Switching(1829)
- PMIC-Spannungsregler-linear(70981)
- PMIC-Spannungsregler-DC DC Switching Regulators(39569)
- PMIC-Regler-DC-DC-Switching-Controller(13507)
- PMIC-Spannungs-Referenz(9453)
- PMIC-v/f und f/v-Wandler(145)
- PMIC-Thermal Management(592)
- PMIC-Supervisor(47946)
- PMIC-RMS bis DC-Wandler(170)
- PMIC-Netzteil-Controller, Monitore(2104)
- PMIC-Power over Ethernet (PoE) Controller(1008)
- PMIC-Power Management-spezialisierte(7722)
- PMIC-Netzschalter, Treiber laden(7706)
- PMIC-PFC (Power Factor Correction)(1222)
- PMIC oder Steuerungen, ideale Dioden(705)
- PMIC-Motor-Treiber, Regler(4712)
- PMIC-Beleuchtung, Ballast-Regler(560)
- PMIC-LED-Treiber(7282)
- PMIC-Laser-Treiber(573)
- PMIC-Hot-Swap-Controller(2816)
- PMIC-Gate-Treiber(7083)
- PMIC-voll, Half-Bridge-Treiber(1342)
- PMIC-Energy Messung(654)
- PMIC-Display-Treiber(1435)
- PMIC-derzeitige Regulierung/Management(1481)
- PMIC-Batterie-Management(5553)
- PMIC-Ladegeräte(3831)
- PMIC-AC DC Konverter, Offline Schalter(4905)
- Memory-Controller(358)
- Memory-Konfigurations-Proms für FPGAs(639)
- Speicher-Akkus(13)
- Erinnerung(65694)
- Logic-universelle Bus-Funktionen(706)
- Logic-Übersetzer, Level-Shifter(2854)
- Logik-Specialty Logic(1870)
- Logik-Signal-Schalter, Multiplexer, Decoder(9420)
- Logic-Shift-Register(2665)
- Logic-Parity Generatoren und Checkers(335)
- Logic-multivibratoren(831)
- Logik-Latches(3658)
- Logik - Tore und Wechselrichter - Multifunktion, konfigurierbar(1687)
- Logik-Tore und Wechselrichter(16453)
- Logic-Flip Flops(7780)
- Logik-FIFOs Speicher(4240)
- Logik-Zähler, Trennlinien(3456)
- Logik-Vergleichsoperator(592)
- Logik-Puffer, Treiber, Receiver, Transceiver(17835)
- Linear-Video-Verarbeitung(2909)
- Linear-Vergleichsoperator(5084)
- Linear-analoge Multiplikatoren, Trennwände(263)
- Linear-Verstärker-Video Amps und Module(1905)
- Linear-Verstärker-Spezial-Zweck(1856)
- Linear - Verstärker - Instrumentierung, OP -Verstärker, Pufferverstärker(34236)
- Linear-Verstärker-Audio(4567)
- Interface-Voice Record und Playback(556)
- Schnittstelle - UARTs (Universal Asynchronous Receivers -Sender)(1237)
- Schnittstelle-Telecom(4467)
- Interface-spezialisierte(4833)
- Interface-Signal Terminatoren(333)
- Interface-Signal-Puffer, Repeater, Splitter(1449)
- Interface-Serializer, Deserializer(1480)
- Schnittstellen-Sensor und Detektor-Interfaces(1524)
- Interface-Module(169)
- Interface-Modems-ICS und Module(407)
- Interface-e/a-Expander(1136)
- Interface-Filter-aktiv(1226)
- Interface-Encoder, Decoder, Konverter(714)
- Interface-Treiber, Receiver, Transceiver(20755)
- Interface-Direct Digital Synthesis (DDS)(117)
- Interface-Controller(3628)
- Interface-Codecs(1676)
- Schnittstelle - Analoge Switches, Multiplexer, Demultiplexer(12567)
- Schnittstelle-analoge Schalter-spezieller Zweck(2533)
- Embedded-System on Chip (SoC)(4496)
- Embedded-PLDs (programmierbare Logik-Vorrichtung)(971)
- Embedded-Mikroprozessoren(10083)
- Embedded-Mikrocontroller-anwendungsspezifische(2275)
- Embedded-Mikrocontroller(99285)
- Eingebettet - Mikrocontroller, Mikroprozessor, FPGA -Module(1527)
- Eingebettet - FPGAs (Feldprogrammiergate -Array) mit Mikrocontrollern(81)
- Embedded-FPGAs (Field Programmable Gate Array)(27747)
- Embedded-DSP (Digital Signal Processors)(4081)
- Eingebettet - CPLDs (komplexe programmierbare Logikgeräte)(5187)
- Datenerfassung-Touch Screen Controller(1210)
- Datenerfassung-Digital to Analog Converter (DAC)(14419)
- Datenerfassung-digitale Potentiometer(6250)
- Datenerfassung-analog zu Digital Converters (ADC)(17776)
- Datenerfassung-analoges Frontend (AFE)(787)
- Datenerfassung-MDE/DACs-spezieller Zweck(3043)
- Clock/Timing-Uhren in Echtzeit(2446)
- Uhr/Timing - programmierbare Timer und Oszillatoren(23469)
- Clock/Timing-IC-Akkus(4)
- Takt/Timing-Delay Lines(1049)
- Uhr/Timing - Uhrengeneratoren, PLLS, Frequenzsynthesizer(32775)
- Clock/Timing-Clock Puffer, Treiber(4568)
- Clock/Timing-anwendungsspezifische(8652)
- Audio Spezial-Zweck(1564)
Relevanter Hersteller







-
Diskrete Halbleiter-Produkte
Diskrete Halbleiter-Produkte
- Aktuelle Regulierung - Dioden, Transistoren(1090)
- Transistoren-besonderer Zweck(226)
- Transistoren-programmierbare Unijunction(48)
- Transistoren-jfets(1558)
- Transistoren-IGBTs-Einzel(4799)
- Transistoren-IGBTs-Module(63420)
- Transistoren-IGBTs-Arrays(26)
- Transistoren-FETs, MOSFETs-Einzel(48330)
- Transistoren-FETs, MOSFETs-RF(4903)
- Transistoren-FETs, MOSFETs-Arrays(6641)
- Transistoren-Bipolar (BJT)-einzeln, Pre-biased(4539)
- Transistoren-Bipolar (BJT)-Einzel(25800)
- Transistoren-Bipolar (BJT)-RF(2087)
- Transistoren-bipolare (BJT)-Arrays, Pre-biased(2115)
- Transistoren-bipolare (BJT)-Arrays(2310)
- Thyristor-triacs(4044)
- Thyristoren-SCRs-Module(3967)
- Thyristoren-SCRs(5436)
- Thyristoren-diacs, sidacs(319)
- Power Driver Module(1627)
- Dioden-zenerdioden-Einzel(87483)
- Dioden-zenerdioden-Arrays(2619)
- Dioden - variable Kapazität (Varik, Varaktoren)(1200)
- Dioden-RF(2753)
- Dioden-Gleichrichter-Einzel(67528)
- Dioden-Gleichrichter-Arrays(20581)
- Dioden-Brücke-Gleichrichter(11700)
Relevanter Hersteller




-
RF/if und RFID
RF/if und RFID
- SIM -Karten für Abonnenten -Identifikationsmodul (SIM)(77)
- RF -Zirkulatoren und Isolatoren(1742)
- RFID, RF-Zugang, Monitoring-ICS(1550)
- RFID Transponder, Tags(747)
- RFID Lesegeräte(464)
- RFID -Bewertungs- und Entwicklungskits, Boards(30)
- RFID Antennen(329)
- RFI und EMI - Abschirm- und Absorbungsmaterialien(6444)
- HF und EMI-Kontakte, Fingerstock und Dichtungen(7497)
- RF Transmitter(668)
- RF Transceiver Module(6900)
- RF-Transceiver ICS(4169)
- HF-Schalter(9276)
- RF Shields(16401)
- HF-Receiver(1998)
- HF -Empfänger, Sender und Transceiver -Einheiten(2763)
- RF Power Divider/Splitter(1223)
- RF Power Controller ICs(86)
- HF-Modulatoren(710)
- HF-Mixer(2800)
- RF misc ICS und Module(3276)
- HF-Front-End (LNA + PA)(419)
- RF -Bewertungs- und Entwicklungskits, Boards(747)
- HF-gerichtete Kupplung(2718)
- RF Diplexer(1464)
- RF-Detektoren(412)
- RF-Demodulatoren(249)
- HF-Antennen(12319)
- HF-Verstärker(19651)
- Balun(1496)
- Dämpfungsglieder(4852)
Relevanter Hersteller







-
Optoelektronik
Optoelektronik
- Optomechanisch(480)
- Leuchten(125)
- Laserdioden, Lasermodule - Laserlieferung, Laserfasern(345)
- Hene Lasersysteme(31)
- Hene Laserköpfe(27)
- Hintergrundbeleuchtung anzeigen(93)
- Xenon-Beleuchtung(387)
- Touchscreen-Overlays(453)
- Panel Indicators, Pilot Lights(75729)
- Optik-Remote-Phosphor-Lichtquelle(269)
- Optik-Reflektoren(665)
- Optik-leichte Rohre(5384)
- Optik-Objektive(4951)
- LEDs-Spacer, Unentschieden(2718)
- LEDs-Lamp-Ersetzungen(29718)
- LEDs - Leiterplattenindikatoren, Arrays, Lichtstäbe, Balkendiagramme(9083)
- LED-thermische Produkte(667)
- LED-Beleuchtung(64)
- LED-Beleuchtung-weiß(37580)
- LED-Beleuchtung-Farbe(4728)
- LED-Beleuchtung-Maiskolben, Motoren, Module(28735)
- LED-Anzeige-diskret(27601)
- Laserdioden, Module(1553)
- Lampen-Glühlampen, Neons(311004)
- Lampen-Kälte-Fluoreszenz (KKL) & UV(164)
- Wechselrichter(7728)
- Infrarot, UV, sichtbare Strahler(3871)
- Fiber Optics-Transmitter-Antrieb integriert(4085)
- Fiber Optics-Transmitter-diskrete(350)
- Fiber Optics-Transceiver Module(18758)
- Fiberoptik-Switches, Multiplexer, Demultiplexer(1387)
- Fiberoptik-Receiver(695)
- Fiberoptik-Dämpfung(654)
- Elektrolumineszenz(102)
- Display, Monitor-Interface Controller(98)
- Display-Module-Vakuum-Leuchtstofflampen (VFD)(249)
- Module anzeigen-LED Dot Matrix und Cluster(865)
- Display-Module-LED-Zeichen und numerische(5421)
- Display-Module-LCD, OLED, Graphic(4654)
- Display-Module-LCD, OLED-Zeichen und numerische(2202)
- Display-Blenden, Objektive(88)
- Adresse, Spezialität(458)
Relevanter Hersteller







-
Sensoren, Wandler
Sensoren, Wandler
- Ultraschallempfänger, Sender - Industrial(115)
- Temperatursensoren - Thermostate - Mechanisch - Industrielles(3103)
- Temperatursensoren - Analog und digitaler Ausgang - Industrial(209)
- Näherungssensoren - Industrial(13611)
- Drucksensoren, Wandler - Industrie(26503)
- Optische Sensoren - Photonik - Zähler, Detektoren, SPCM (Einzelphotonzählmodul)(751)
- Optische Sensoren - Kameramodule(875)
- Magnetsensoren - Position, Nähe, Geschwindigkeit (Module) - Industrie(554)
- Kraftsensoren - Industrial(346)
- Flusssensoren - Industrielles(151)
- Float, Level Sensoren - Industrial(310)
- Encoder - Industrial(4980)
- Farbsensoren - Industrial(50)
- Berührungssensoren(100)
- Ultraschall-Receiver, Transmitter(2421)
- Temperatursensoren-Thermostat-Solid State(1096)
- Temperatursensoren-Thermostate-mechanisch(3397)
- Temperatursensoren - Thermoelemente, Temperatursonden(1921)
- Temperatursensoren - RTD (Widerstandstemperaturdetektor)(1525)
- Temperatursensoren-PTC-Thermistoren(2273)
- Temperatursensoren-ntc-thermistoren(13259)
- Temperatursensoren-Analog und Digital Output(3928)
- DMS(1399)
- Spezialisierte Sensoren(1861)
- Solarzellen(503)
- Schock-Sensoren(84)
- Sensor-Interface-Junction-Blöcke(2519)
- Sensor-Kabel-Baugruppen(22011)
- Proximity/Belegung Sensoren-fertige Einheiten(725)
- Näherungsschalter(2860)
- Drucksensoren, Wandler(11317)
- Positionssensoren - Winkel, lineare Positionsmessung(6022)
- Optische Sensoren-reflektierende-Logik-Ausgang(194)
- Optische Sensoren - reflektierend - analoge Ausgang(432)
- Optische Sensoren-Phototransistoren(1027)
- Optische Sensoren - Photointerrupter - Schlitztyp - Transistorausgang(1427)
- Optische Sensoren - Photointerrupter - Schlitztyp - Logikausgabe(1215)
- Optische Sensoren-Lichtschranke, Industrial(16763)
- Optische Sensoren-Photodioden(1543)
- Optische Sensoren-Foto-Detektoren-Remote Receiver(2605)
- Optische Sensoren-Foto-Detektoren-Logik-Ausgang(146)
- Optische Sensoren-Foto-Detektoren-CDs-Zellen(74)
- Optische Sensoren-Distanz-Messung(377)
- Optische Sensoren-Ambient Light, IR, UV Sensoren(1305)
- Multifunktions(558)
- Motion Sensors-Vibration(337)
- Motion Sensors-Tilt Schalter(67)
- Bewegungsmelder-optisch(719)
- Motion Sensors-Neigungssensoren(175)
- Motion Sensors-Imus (Trägheit-Maßeinheiten)(416)
- Motion Sensors-Kreisel(214)
- Motion Sensors-Beschleunigungsmesser(1911)
- Magnete-Sensor abgestimmt(119)
- Magnete-Multi Purpose(1965)
- Magnetische Sensoren-Schalter (Solid State)(3700)
- Magnetsensoren - Position, Nähe, Geschwindigkeit (Module)(5199)
- Magnetische Sensoren-linear, Kompass (ICS)(1247)
- Magnetsensoren - Kompass, Magnetfeld (Module)(35)
- LVDT -Wandler (linearer variabler Differentialtransformator)(204)
- IrDA Transceiver-Module(196)
- Bildsensor, Kamera(2235)
- Feuchtigkeit-Sensoren(1425)
- Gas-Sensoren(1217)
- Force Sensoren(188)
- Durchfluss-Sensoren(550)
- Float, Level Sensoren(1343)
- Encoder(6357)
- Staub-Sensoren(43)
- Aktuelle Wandler(3455)
- Color Sensoren(85)
- Verstärker(1905)
Relevanter Hersteller







-
Anschlüsse, Verbindungen
Anschlüsse, Verbindungen
- USB, DVI, HDMI -Stecker(446)
- Festkörperbeleuchtungsstecker(555)
- Steckdosen für ICs, Transistoren(953)
- Steckbare Steckverbinder(1221)
- Photovoltaik (Solarpanel) Anschlüsse(136)
- Glasfaseranschlüsse(370)
- FFC, FPC (flache flexible) Anschlüsse(761)
- D-Sub, D-förmige Stecker(2887)
- Koaxialverbinder (RF)(2389)
- Rundanschlüsse(14162)
- Stromanbeter Blade Type(273)
- Stecker und Behälter(2597)
- USB, DVI, HDMI Stecker-Adapter(572)
- USB, DVI, HDMI -Stecker(4298)
- Klemmen-Wire to Board Steckverbinder(217)
- Klemmen-Draht-Steckverbinder(4322)
- Klemmen-Draht-Pin Stecker(328)
- Terminals-Revolver Steckverbinder(1273)
- Terminals-spezialisierte Steckverbinder(2042)
- Klemmen-Spaten Verbinder(3902)
- Klemmen-Löten/Stecker(345)
- Klemmen-Verschraubungen(745)
- Klemmen-Ring Steckverbinder(12596)
- Klemmen-rechteckige Steckverbinder(4747)
- Terminals - Schnellverbindungen, schnelle Trennungsanschlüsse(8514)
- Klemmen-PC PIN, Single Post Connectors(3776)
- Klemmen-PC-Pin-Buchsen, Sockel-Steckverbinder(5883)
- Klemmen-magnetische Draht-Steckverbinder(1653)
- Klemmen-Messer Steckverbinder(112)
- Klemmen-Gehäuse, Stiefel(2850)
- Klemmen-Folie Steckverbinder(108)
- Klemmen-Barrel, Bullet-Steckverbinder(1107)
- Klemmen-Adapter(137)
- Terminal-Streifen und Revolver-Boards(1159)
- Terminal Junction Systeme(2533)
- Anschlussblöcke-Draht an Bord(43615)
- Terminal Blocks-spezialisierte(3722)
- Terminal Blocks-Power Distribution(847)
- Anschlussblöcke-Panel Mount(1359)
- Terminal Blocks-Interface Module(1819)
- Anschlussblöcke-Kopfzeilen, Stecker und Buchsen(119920)
- Anschlussblöcke-DIN-Schiene, Kanal(9373)
- Anschlussblöcke-Kontakte(65)
- Anschlussblöcke-Barrier Blocks(47517)
- Anschlussblöcke-Adapter(1059)
- Solid State Lighting Verbinder-Kontakte(271)
- Festkörperbeleuchtungsstecker(1344)
- Buchsen für ICS, Transistoren-Adapter(275)
- Steckdosen für ICs, Transistoren(22148)
- Shunts, Jumper(907)
- Rechteckige Verbinder-Feder geladen(7721)
- Rechteckige Steckverbinder-Gehäuse(43023)
- Rechteckige Verbinder-Kopfzeilen, Spezial-PIN(6129)
- Rechteckige Anschlüsse - Header, Gefäße, weibliche Sockel(229601)
- Rechteckige Verbinder-Kopfzeilen, männliche Pins(543338)
- Rechteckige Anschlüsse - kostenloses Hängen, Panelhalterung(30142)
- Rechteckige Verbinder-Kontakte(10681)
- Rechteckige Anschlüsse - Board in, Direktdraht zum Board(2432)
- Rechteckige Verbinder-Adapter(475)
- Rechteckig - Brett zu Board -Steckern - Header, Behälter, weibliche Sockel(9)
- Rechteckig - Brett zu Board -Steckern - Header, männliche Stifte(2)
- Rechteckige Anschlüsse - Board -Abstandshalter, Stacker (Board zu Board)(238901)
- Rechteckige Anschlüsse - Arrays, Kantentyp, Mezzanin (Board zu Board)(37853)
- Stromanschluss-Eingänge, Steckdosen, Module(10310)
- Steckbare Steckverbinder(6049)
- Photovoltaik- (Solarpanel) Anschlüsse - Kontakte(77)
- Photovoltaik (Solarpanel) Anschlüsse(504)
- Modulare Steckverbinder-Verdrahtung Blöcke(99)
- Modulare Steckverbinder-Stecker(1674)
- Modulare Steckverbinder-Stecker Gehäuse(181)
- Modulare Steckverbinder-Buchsen mit magnetischen(10152)
- Modulare Steckverbinder-Buchsen(23416)
- Modulare Steckverbinder-Adapter(855)
- Memory Connectors-PC Cards-Adapter(21)
- Memory Connectors-PC Card Sockets(3299)
- Memory Connectors-Inline Modul Sockets(3390)
- LGH Steckverbinder(764)
- Keystone-Einsätze(2758)
- Keystone-Frontplatte, Frames(1926)
- Heavy Duty Steckverbinder-Einsätze, Module(4190)
- Schwerlastanschlüsse - Gehäuse, Kapuzen, Basen(17226)
- Heavy Duty Steckverbinder-Frames(523)
- Heavy Duty Steckverbinder-Kontakte(1832)
- Heavy Duty Steckverbinder-Baugruppen(671)
- LWL-Steckverbinder-Gehäuse(919)
- Glasfaser-Steckverbinder - Adapter(4455)
- LWL-Steckverbinder(3001)
- FFC, FPC (flache flexible) Steckverbinder - Gehäuse(652)
- FFC, FPC (flache flexible) Anschlüsse - Kontakte(202)
- FFC, FPC (flache flexible) Anschlüsse(18691)
- D-Sub, d-förmige Steckverbinder-Terminatoren(47)
- D-Sub, d-förmige Steckverbinder-Gehäuse(12238)
- D-Sub, d-förmige Steckverbinder-Kontakte(2714)
- D-Sub, D-förmige Steckverbinder-Rückenschalen, Kapuzen(5995)
- D-Sub, d-förmige Steckverbinder-Adapter(1304)
- D-Sub Steckverbinder(141346)
- D-förmige Steckverbinder-Centronics(8770)
- Kontakte, Frühling geladen und Druck(630)
- Kontakte-Multi Purpose(6196)
- Kontakte-"Leadframe"(122)
- Koaxial-Steckverbinder (RF)-Terminatoren(1231)
- Koaxial-Steckverbinder (RF)-Kontakte(480)
- Koaxial-Steckverbinder (RF)-Adapter(6386)
- Koaxialverbinder (RF)(25734)
- Rundsteckverbinder-Gehäuse(441226)
- Rundsteckverbinder-Kontakte(4737)
- Rundsteckverbinder-backschalen und Kabel-Klemmen(53692)
- Rundsteckverbinder-Adapter(8839)
- Rundanschlüsse(1196254)
- Card Edge Steckverbinder-Gehäuse(469)
- Karte Edge Verbinder-edgeboard Verbinder(672683)
- Card Edge Verbinder-Kontakte(325)
- Card Edge Verbinder-Adapter(73)
- Blade Type Power Steckverbinder-Gehäuse(837)
- Blade Type Power Connectors-Kontakte(393)
- Stromanbeter Blade Type(4163)
- Zwischen Serien-Adapter(649)
- Barrel-Stromanschluss(935)
- Barrel-Audio-Anschlüsse(2432)
- Barrel-Audio Adapter(92)
- Banana und Tip Steckverbinder-Buchsen, Stecker(1644)
- Banana and Tip Connectors-Binding Posts(239)
- Banana und Tip Steckverbinder-Adapter(75)
- Backplane Steckverbinder-spezialisiert(45586)
- Backplane Steckverbinder-Gehäuse(6863)
- Backplane Steckverbinder-Hard metrisch, Standard(6297)
- Backplane Steckverbinder-DIN 41612(9408)
- Backplane Steckverbinder-Kontakte(3583)
- Backplane Connectors-ARINC Einsätze(2357)
- Backplane Steckverbinder-ARINC(3789)
Relevanter Hersteller







-
Widerstände
-
Kondensatoren
Kondensatoren
- Aluminium-Elektrolytkondensatoren(16817)
- Trimmer, Variable Kondensatoren(3151)
- Dünne Folien-Kondensatoren(3473)
- Tantal-Kondensatoren(136103)
- Tantal-Polymer-Kondensatoren(9778)
- Silizium-Kondensatoren(320)
- Niob Oxide Kondensatoren(330)
- Mica und PTFE Kondensatoren(9101)
- Folien-Kondensatoren(150406)
- Elektrische Doppelschichtkondensatoren (EDLC), Superkondensatoren(2782)
- Keramische Kondensatoren(833829)
- Kondensatoren-Netzwerke, Arrays(2383)
- Aluminium-Elektrolytkondensatoren(125325)
- Aluminium-Polymer-Kondensatoren(7544)
Relevanter Hersteller






-
Transformatoren
Transformatoren
Relevanter Hersteller







-
Isolatoren
-
Kristalle, Oszillatoren, Resonatoren
Kristalle, Oszillatoren, Resonatoren
Relevanter Hersteller






-
Switches
Switches
- Verriegelungsschalter(2893)
- Emergency-Stop-Schalter (E-Stop)(1160)
- Kabelzugschalter(571)
- Toggle-Schalter(33608)
- Rändelrads Schalter(742)
- Schalter(14263)
- Snap-Aktion, Endschalter begrenzen(28077)
- Slide-Schalter(5166)
- Selector-Schalter(9720)
- Rotary Switches(13850)
- Rocker Schalter(53790)
- Drucktaste-Schalter-Hall-Effekt(127)
- Drucktaste Schalter(190826)
- Programmierbare Display-Switches(39)
- Navigations-Schalter, Joystick(1882)
- Magnetische, Reed-Schalter(1399)
- Keypad-Schalter(637)
- Keylock Schalter(3684)
- DIP Schalter(7747)
- Konfigurierbare Switch-Komponenten-Objektiv(1435)
- Konfigurierbare Schalter-Komponenten-Lichtquelle(1236)
- Konfigurierbare Switch-Komponenten-Contact Block(1401)
- Konfigurierbare Switch-Komponenten-Body(16077)
- Disconnect-Switch-Komponenten(2567)
Relevanter Hersteller






-
Relais
Relais
- Sicherheitsrelais(1310)
- Reedrelais(1735)
- Hochfrequenz (RF) -Relais(1190)
- Schütze (Festkörper)(686)
- Schütze (elektromechanisch)(11952)
- Kfz-Relais(1881)
- Solid State Relais(10652)
- Signal-Relais, bis zu 2 Ampere(9149)
- Relay-Sockets(2075)
- Power Relays, über 2 Ampere(31604)
- E / A-Relaismodule(712)
- I/o-Relay-Module-Input(2)
- I/o-Relay-Modul-Racks(247)
Relevanter Hersteller
















Sprache auswählen
Aktuelle Sprache
Deutsch
- English
- Deutsch
- Italia
- Français
- 日本語
- 한국의
- русский
- Svenska
- Nederland
- español
- Português
- polski
- Suomi
- Gaeilge
- Slovenská
- Slovenija
- Čeština
- Melayu
- Magyarország
- Hrvatska
- Dansk
- românesc
- Indonesia
- Ελλάδα
- Български език
- Afrikaans
- IsiXhosa
- isiZulu
- lietuvių
- Maori
- Kongeriket
- Монголулс
- O'zbek
- Tiếng Việt
- हिंदी
- اردو
- Kurdî
- Català
- Bosna
- Euskera
- العربية
- فارسی
- Corsa
- Chicheŵa
- עִבְרִית
- Latviešu
- Hausa
- Беларусь
- አማርኛ
- Republika e Shqipërisë
- Eesti Vabariik
- íslenska
- မြန်မာ
- Македонски
- Lëtzebuergesch
- საქართველო
- Cambodia
- Pilipino
- Azərbaycan
- ພາສາລາວ
- বাংলা ভাষার
- پښتو
- malaɡasʲ
- Кыргыз тили
- Ayiti
- Қазақша
- Samoa
- සිංහල
- ภาษาไทย
- Україна
- Kiswahili
- Cрпски
- Galego
- नेपाली
- Sesotho
- Тоҷикӣ
- Türk dili
- ગુજરાતી
- ಕನ್ನಡkannaḍa
- मराठी
Wie funktioniert das Beschleunigungsmesser- und Gyroskopmodul MPU6050?
Zeit: 2026/01/20
Durchsuchen: 667
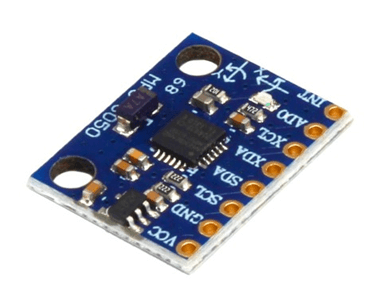
Moderne Bewegungserkennungsanwendungen erfordern kompakte, genaue und energieeffiziente Sensoren, die sowohl Bewegung als auch Orientierung verfolgen können.Das Beschleunigungsmesser- und Gyroskopmodul MPU6050

MPU6050
Accelerometer Sensor
INVENSENS QFN24
In Stock: 10123 pcs
erfüllt diese Anforderungen.In diesem Artikel werden die Pinbelegung, Funktionen, Spezifikationen, Schaltungsbetrieb, Arduino-Schnittstelle, Anwendungen und mechanischen Abmessungen des MPU6050-Moduls erläutert.
Katalog
MPU6050 Modul Basic
Die MPU6050
MPU6050
Accelerometer Sensor
INVENSENS QFN24
In Stock: 10123 pcs
Das Beschleunigungsmesser- und Gyroskopmodul ist ein kompakter Bewegungsverfolgungssensor, der einen 3-Achsen-Beschleunigungsmesser und ein 3-Achsen-Gyroskop in einem einzigen Chip integriert.Es ist für die Erkennung von linearer Beschleunigung, Neigung, Vibration und Drehbewegung entlang der X-, Y- und Z-Achse konzipiert und eignet sich daher ideal für die Bewegungs- und Orientierungserkennung.
Durch die Kombination von Beschleunigungsmesser- und Gyroskopdaten liefert der MPU6050 durch Sensorfusion genauere und stabilere Bewegungsmessungen.Es verfügt außerdem über einen integrierten Digital Motion Processor (DMP), der bei der internen Verarbeitung komplexer Berechnungen hilft und die Arbeitsbelastung des Hauptmikrocontrollers reduziert.
Das Modul kommuniziert über die I²C-Schnittstelle und ermöglicht so eine einfache Integration mit gängigen Plattformen wie Arduino, ESP32 und Raspberry Pi.Aufgrund seiner geringen Größe, seines geringen Stromverbrauchs und seiner Erschwinglichkeit wird es häufig in der Robotik, Drohnen, selbstausgleichenden Systemen und tragbaren Geräten eingesetzt.
Wenn Sie Interesse am Kauf des MPU6050-Moduls haben, kontaktieren Sie uns bitte bezüglich Preis und Verfügbarkeit.
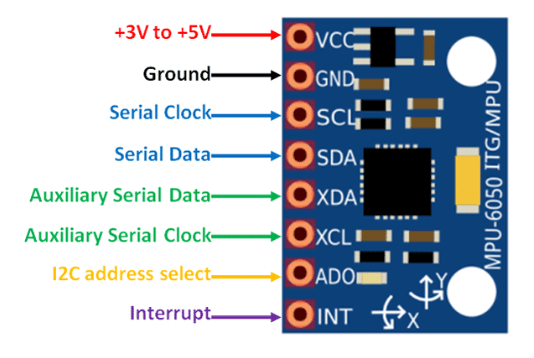
Details zur Pinbelegung des MPU6050-Moduls
|
Pin
Name |
Etikett
auf Modul |
Beschreibung |
|
VCC |
VCC |
Stromversorgung
Eingabe.Unterstützt 3 V bis 5 V aufgrund des integrierten Spannungsreglers. |
|
GND |
GND |
Boden
Verbindung.Mit Systemerde verbinden. |
|
SCL |
SCL |
Serieller I²C-Takt
Leitung zur Kommunikation mit dem Mikrocontroller. |
|
SDA |
SDA |
Serielle I²C-Daten
Leitung zur Übertragung von Sensordaten. |
|
XDA |
XDA |
Hilfs-I²C
Serieller Datenpin zum Anschluss externer Sensoren. |
|
XCL |
XCL |
Hilfs-I²C
serieller Takt-Pin für externe Sensorschnittstelle. |
|
AD0 |
AD0 |
I²C-Adresse
Pin auswählen.LOW = 0x68, HIGH = 0x69. |
|
INT |
INT |
Ausgabe unterbrechen
Pin für Bewegungserkennung und Datenbereitschaftssignale. |
Alternativen und gleichwertiges Modell
• MPU6500
MPU6500
ENSENSE
In Stock: 66465 pcs
(6-Achsen-IMU)
• MPU9250
MPU9250
INVENSENSE INCORPORATED (IV2)
In Stock: 6036 pcs
(9-Achsen-IMU)
• ICM-20602
ICM-20602
TDK InvenSense
IMU ACCEL/GYRO/TEMP I2C/SPI LGA
In Stock: 20200 pcs
(6-Achsen-IMU)
• ICM-20948

ICM-20948
TDK InvenSense
IMU ACCEL/GYRO/COMPI2C/SPI 24QFN
In Stock: 5340 pcs
(9-Achsen-IMU)
Technische Daten des MPU6050-Moduls
|
Parameter |
Spezifikation |
|
Sensortyp |
6-Achsen-IMU
(3-Achsen-Beschleunigungsmesser + 3-Achsen-Gyroskop) |
|
Beschleunigungsmesser
Reichweite |
±2 g, ±4 g, ±8
g, ±16 g (wählbar) |
|
Gyroskop-Reichweite |
±250, ±500,
±1000, ±2000 °/s (wählbar) |
|
Beschleunigungsmesser
Auflösung |
16-Bit-ADC |
|
Gyroskop
Auflösung |
16-Bit-ADC |
|
Digitale Bewegung
Prozessor (DMP) |
Ja, integriert |
|
Temperatur
Sensor |
Eingebaut |
|
Temperatur
Messbereich |
−40 °C bis +85 °C |
|
Kommunikation
Schnittstelle |
I²C (bis zu 400
kHz) |
|
I²C-Adresse |
0x68 oder 0x69
(über AD0-Pin) |
|
Betrieb
Spannung (IC) |
2,375 V bis 3,46
V |
|
Moduleingang
Spannung |
3 V bis 5 V (mit
Bordregler) |
|
Betrieb
Aktuell |
~3,9 mA
(typisch) |
|
Energiesparmodus
Aktuell |
~10 µA |
|
Taktquelle |
Intern
Oszillator / externe Referenz |
|
Pin unterbrechen |
Ja (INT-Pin) |
|
Hilfs-I²C
Schnittstelle |
Ja (XDA, XCL) |
|
Empfindlichkeit
Stabilität |
Hohe Stabilität
MEMS-Design |
|
Betrieb
Temperatur |
−40 °C bis +85 °C |
|
Pakettyp |
QFN (IC),
Breakout-Modul |
|
Modul
Abmessungen |
~20 mm × 15 mm |
Funktionen des MPU6050-Moduls
6-Achsen-Bewegungsverfolgung (3-Achsen-Beschleunigungsmesser + 3-Achsen-Gyroskop)
Der MPU6050
MPU6050
Accelerometer Sensor
INVENSENS QFN24
In Stock: 10123 pcs
vereint einen 3-Achsen-Beschleunigungsmesser und ein 3-Achsen-Gyroskop in einem MEMS-Chip.Dies ermöglicht die gleichzeitige Messung von linearer Beschleunigung, Neigung, Vibration und Drehbewegung und eignet sich somit für die präzise Bewegungs- und Orientierungserfassung.
16-Bit hochauflösender ADC
Sowohl der Beschleunigungsmesser als auch das Gyroskop verwenden integrierte 16-Bit-Analog-Digital-Wandler.Diese hohe Auflösung ermöglicht genaue und reibungslose Bewegungsdaten, die für Stabilisierungs-, Navigations- und Steuerungsanwendungen wichtig sind.
Integrierter digitaler Bewegungsprozessor (DMP)
Der integrierte DMP kann die Sensorfusion intern verarbeiten, wodurch komplexe Berechnungen auf dem Hauptmikrocontroller entfallen.Dies verbessert die Systemeffizienz und trägt dazu bei, stabilere Bewegungsverfolgungsergebnisse zu erzielen.
I²C-Kommunikationsschnittstelle
Das Modul kommuniziert über das I²C-Protokoll und ermöglicht so eine einfache Verbindung mit Mikrocontrollern wie Arduino, ESP32 und Raspberry Pi.Es unterstützt konfigurierbare I²C-Adressen für eine flexible Systemintegration.
Breite Betriebsspannungsunterstützung
Das MPU6050-Modul akzeptiert aufgrund seines integrierten Spannungsreglers eine Eingangsspannung von 3 V bis 5 V, wodurch es sowohl mit 3,3 V- als auch 5 V-Logiksystemen kompatibel ist.
Eingebauter Temperatursensor
Ein interner Temperatursensor liefert Umgebungstemperaturdaten, die zur Kompensation oder Systemüberwachung verwendet werden können.
Zusätzliche I²C-Schnittstelle für externe Sensoren
Die zusätzlichen I²C-Pins ermöglichen den direkten Anschluss externer Sensoren wie Magnetometer und ermöglichen so erweiterte Bewegungserkennungsmöglichkeiten.
Geringer Stromverbrauch
Der auf Effizienz ausgelegte MPU6050 unterstützt Betriebsmodi mit geringem Stromverbrauch und eignet sich daher für batteriebetriebene und tragbare Geräte.
MPU6050-Modul arbeitet im Schaltkreis
Die Schaltung zeigt, wie das MPU6050
MPU6050
Accelerometer Sensor
INVENSENS QFN24
In Stock: 10123 pcs
-Modul mit Strom versorgt wird, mit einem Mikrocontroller kommuniziert und Bewegungsdaten verarbeitet.Obwohl der MPU6050-IC intern mit 3,3 V arbeitet, ist das Modul für die Aufnahme einer 5-V-Eingangsspannung ausgelegt.Ein 3,3-V-Low-Dropout-Spannungsregler (LDO) wird verwendet, um den 5-V-Eingang auf eine stabile 3,3-V-Schiene herunterzutransformieren.Entkopplungskondensatoren, die in der Nähe des Reglers und der MPU6050-Stromanschlüsse platziert sind, helfen, Rauschen zu unterdrücken und einen stabilen Sensorbetrieb zu gewährleisten.
Die Kommunikation zwischen der MPU6050 und dem Mikrocontroller erfolgt über die I²C-Schnittstelle unter Verwendung der SDA- (Daten) und SCL- (Takt) Leitungen.In der Schaltung werden beide Leitungen mithilfe von 4,7-kΩ-Widerständen auf 3,3 V hochgezogen, was eine Standardanforderung für eine ordnungsgemäße I²C-Signalisierung ist.Der AD0-Pin ermöglicht die Auswahl der I²C-Adresse, sodass das Modul mit anderen I²C-Geräten am selben Bus koexistieren kann.

Im Inneren der MPU6050 wandeln der 3-Achsen-Beschleunigungsmesser und das 3-Achsen-Gyroskop physikalische Bewegungen in elektrische Signale um.Diese Signale werden vom internen 16-Bit-ADC digitalisiert und im FIFO-Puffer gespeichert.Wenn neue Daten verfügbar werden, wird der INT-Pin (Interrupt) aktiviert und benachrichtigt den Mikrocontroller, dass neue Bewegungsdaten zum Lesen bereit sind.Dieser Interrupt-gesteuerte Ansatz verbessert die Effizienz und reduziert unnötigen Busverkehr.
Die Schaltung legt auch die zusätzlichen I²C-Pins (XDA und XCL) frei, sodass externe Sensoren wie ein Magnetometer direkt über die MPU6050 angeschlossen werden können.Insgesamt gewährleistet dieses Schaltungsdesign eine zuverlässige Stromversorgung, stabile Kommunikation und genaue Bewegungserkennung, wodurch sich das MPU6050-Modul problemlos in Mikrocontroller-basierte Systeme wie Robotik, Drohnen und Bewegungsverfolgungsanwendungen integrieren lässt.
MPU6050-Modul mit Arduino
Dank der I²C-Kommunikationsschnittstelle und der umfassenden Bibliotheksunterstützung ist die Anbindung des MPU6050
MPU6050
Accelerometer Sensor
INVENSENS QFN24
In Stock: 10123 pcs
-Moduls an ein Arduino unkompliziert und einsteigerfreundlich.Der MPU6050 vereint einen 3-Achsen-Beschleunigungsmesser und ein 3-Achsen-Gyroskop in einem einzigen Modul und ist damit eine beliebte Wahl für Bewegungserkennungsprojekte wie Robotik, Drohnen und selbstausgleichende Systeme.Durch die Verwendung von Arduino als Controller können Benutzer Bewegungsdaten ohne komplexe Hardwareanforderungen schnell lesen und verarbeiten.

Im Verkabelungsaufbau versorgt der Arduino den MPU6050 über seine 5V- und GND-Pins mit Strom.Obwohl der Arduino 5 V ausgibt, verfügt das MPU6050-Modul über einen integrierten Spannungsregler, der diese in 3,3 V umwandelt, was die erforderliche Betriebsspannung für den Sensor ist.Die Kommunikation erfolgt über den I²C-Bus, wobei die SDA- und SCL-Pins des MPU6050 mit den A4- (SDA) und A5-Pins (SCL) des Arduino Uno verbunden sind.Diese Zweidrahtschnittstelle vereinfacht Verbindungen und unterstützt eine stabile Datenübertragung.
Auf der Softwareseite erleichtern weit verbreitete Bibliotheken – wie die von Jeff Rowberg entwickelte MPU6050-Bibliothek – die Datenerfassung erheblich.Nach der Installation der Bibliothek in der Arduino IDE können Benutzer auf Beispielskizzen zugreifen, die rohe Beschleunigungsmesser- und Gyroskopwerte lesen oder den Digital Motion Processor (DMP) des Sensors für verarbeitete Ausgaben nutzen.Diese Beispiele helfen Benutzern, Bewegungsdaten schnell zu visualisieren, ohne komplexe Algorithmen schreiben zu müssen.
Sobald das Programm hochgeladen ist, empfängt der Arduino kontinuierlich Bewegungsdaten vom MPU6050 und zeigt Werte wie Gieren, Nicken und Rollen auf dem seriellen Monitor an.Diese klare und effiziente Integration macht den MPU6050 mit Arduino zu einer hervorragenden Lösung sowohl für Bildungsprojekte als auch für professionelle Motion-Tracking-Anwendungen.
MPU6050-Modulanwendungen
• Robotische Bewegungssteuerung und Navigation
• Selbstbalancierende Roboter und Fahrzeuge
• Drohnen und Quadrocopter-Stabilisierungssysteme
• Inertiale Messeinheiten (IMUs) für die Navigation
• Gestenerkennungssysteme
• Bewegungsverfolgung und Aktivitätsüberwachung
• Gimbal-Stabilisierung der Kamera
• Virtual Reality (VR) und Gaming-Controller
• Tragbare Fitness- und Gesundheitsüberwachungsgeräte
• Anwendungen zur Neigungs- und Vibrationserkennung
• Mensch-Maschine-Schnittstellensysteme (HMI).
• Bildungs- und Forschungsprojekte
Mechanische Abmessungen des MPU6050-Moduls

Fazit
Das Beschleunigungsmesser- und Gyroskopmodul MPU6050
MPU6050
Accelerometer Sensor
INVENSENS QFN24
In Stock: 10123 pcs
ist eine zuverlässige 6-Achsen-IMU zur Bewegungs- und Orientierungserkennung.Mit seinen hochauflösenden 16-Bit-ADCs, integriertem DMP, flexiblen Stromversorgungsoptionen und einer unkomplizierten I²C-Schnittstelle vereinfacht es sowohl Hardware-Design als auch Software-Entwicklung.Die klare Pinbelegung, die robusten Spezifikationen und die Kompatibilität des Moduls mit Arduino und anderen Mikrocontrollern machen es einem breiten Publikum zugänglich, während seine Leistung den Anforderungen professioneller Motion-Tracking-Systeme entspricht.
Häufig gestellte Fragen [FAQ]
1. Was ist der Unterschied zwischen MPU6050 und MPU9250?
Die MPU6050 ist eine 6-Achsen-IMU mit Beschleunigungsmesser und Gyroskop, während die MPU9250 über ein 3-Achsen-Magnetometer verfügt, was sie zu einem vollständigen 9-Achsen-Bewegungssensor macht.
2. Muss der MPU6050 vor der Verwendung kalibriert werden?
Ja, eine Kalibrierung wird empfohlen, um Offset-Fehler bei Beschleunigungsmesser- und Gyroskop-Messwerten zu reduzieren, insbesondere für genaue Gier-, Nick- und Rollmessungen.
3. Kann der MPU6050 mit ESP32 oder Raspberry Pi verwendet werden?
Ja, der MPU6050 funktioniert mit ESP32 und Raspberry Pi über I²C-Kommunikation und unterstützte Bibliotheken für jede Plattform.
4. Wie hoch ist die typische Datenausgaberate des MPU6050?
Der MPU6050 unterstützt Ausgangsdatenraten bis zu 1 kHz, abhängig von der Konfiguration und davon, ob DMP aktiviert ist.
5. Wie genau ist die MPU6050 bei der Bewegungsverfolgung?
Der MPU6050 bietet eine gute Genauigkeit für die meisten Verbraucher- und Bildungsprojekte, aber ohne Sensorfusion oder externe Referenzsensoren kann es zu einer langfristigen Drift kommen.
6. Kann der MPU6050 die absolute Ausrichtung messen?
Nein, es kann den absoluten Kurs nicht selbst messen, da ihm ein Magnetometer fehlt.Für die tatsächliche Nordreferenz sind externe Sensoren erforderlich.
7. Warum driftet die Gierung der MPU6050 mit der Zeit?
Eine Gierdrift tritt aufgrund der Gyroskopvorspannung und der Anhäufung von Geräuschen auf, was bei IMUs ohne magnetische Korrektur häufig vorkommt.
Verwandter Artikel
-
![Was ist der Herzfrequenz-Sauerstoff-Pulssensor MAX30100?]() Jan 21 2026Was ist der Herzfrequenz-Sauerstoff-Pulssensor MAX30100?
Jan 21 2026Was ist der Herzfrequenz-Sauerstoff-Pulssensor MAX30100?Die Überwachung der Herzfrequenz und des Blutsauerstoffs ist zu wesentlichen Merkmalen moderner tragbarer Gesundheitsgeräte geworden.In diesem Artik... -
![Funktionen, Schaltplan und Arduino-Anleitung des Luftqualitätssensors MQ-135]() Jan 20 2026Funktionen, Schaltplan und Arduino-Anleitung des Luftqualitätssensors MQ-135
Jan 20 2026Funktionen, Schaltplan und Arduino-Anleitung des Luftqualitätssensors MQ-135Gassensoren sind hilfreich bei der Erkennung schädlicher Gase und Schadstoffe, die ein Risiko für die menschliche Gesundheit und Sicherheit darstell...


Verwandte -Produkte

GJM0335C1E9R9DB01J
CAP CER 9.9PF 25V C0G/NP0 0201
1812GC472MAT3A
CAP CER 4700PF 2KV X7R 1812
12103A472GAT2A
CAP CER 4700PF 25V NP0 1210

GCM1885C1H1R5CZ13D
CAP CER 1.5PF 50V C0G/NP0 0603

MAX16943EGEE/V+T
IC CTLR USB PROTECTOR QSOP

ATMEGA48-20AUR
IC MCU 8BIT 4KB FLASH 32TQFP

LC4512V-35TN176-5I
LC4512V-35TN176-5I LATTICE
M31002S2HP
MIT QFP

M40Z300WMH6
M40Z300WMH6 ST

NM27C0101V
NM27C0101V NS

XC4013XLA-09PQ208C
XC4013XLA-09PQ208C XILINX

B5011UA1KQMG
BROADCOM QFP

IDT7026S35J
Relevanzprodukte
ICM-20602
IMU ACCEL/GYRO/TEMP I2C/SPI LGA
vorrätig: 579
ICM-20948
IMU ACCEL/GYRO/COMPI2C/SPI 24QFN
vorrätig: 812
MPU9250
vorrätig: 1495
MPU6050
INVENSENS QFN24
vorrätig: 1086
MPU6500
vorrätig: 101