Alle Kategorien
-
Integrierte schaltkreise (ICS)
Integrierte schaltkreise (ICS)
- Schnittstelle - Sensor, kapazitive Berührung(642)
- Spezialisierte ICS(12302)
- PMIC-Spannungsregler-besonderer Zweck(5644)
- PMIC-Spannungsregler-lineare Regler(793)
- PMIC-Spannungsregler-linear + Switching(1829)
- PMIC-Spannungsregler-linear(70981)
- PMIC-Spannungsregler-DC DC Switching Regulators(39569)
- PMIC-Regler-DC-DC-Switching-Controller(13507)
- PMIC-Spannungs-Referenz(9453)
- PMIC-v/f und f/v-Wandler(145)
- PMIC-Thermal Management(592)
- PMIC-Supervisor(47946)
- PMIC-RMS bis DC-Wandler(170)
- PMIC-Netzteil-Controller, Monitore(2104)
- PMIC-Power over Ethernet (PoE) Controller(1008)
- PMIC-Power Management-spezialisierte(7722)
- PMIC-Netzschalter, Treiber laden(7706)
- PMIC-PFC (Power Factor Correction)(1222)
- PMIC oder Steuerungen, ideale Dioden(705)
- PMIC-Motor-Treiber, Regler(4712)
- PMIC-Beleuchtung, Ballast-Regler(560)
- PMIC-LED-Treiber(7282)
- PMIC-Laser-Treiber(573)
- PMIC-Hot-Swap-Controller(2816)
- PMIC-Gate-Treiber(7083)
- PMIC-voll, Half-Bridge-Treiber(1342)
- PMIC-Energy Messung(654)
- PMIC-Display-Treiber(1435)
- PMIC-derzeitige Regulierung/Management(1481)
- PMIC-Batterie-Management(5553)
- PMIC-Ladegeräte(3831)
- PMIC-AC DC Konverter, Offline Schalter(4905)
- Memory-Controller(358)
- Memory-Konfigurations-Proms für FPGAs(639)
- Speicher-Akkus(13)
- Erinnerung(65694)
- Logic-universelle Bus-Funktionen(706)
- Logic-Übersetzer, Level-Shifter(2854)
- Logik-Specialty Logic(1870)
- Logik-Signal-Schalter, Multiplexer, Decoder(9420)
- Logic-Shift-Register(2665)
- Logic-Parity Generatoren und Checkers(335)
- Logic-multivibratoren(831)
- Logik-Latches(3658)
- Logik - Tore und Wechselrichter - Multifunktion, konfigurierbar(1687)
- Logik-Tore und Wechselrichter(16453)
- Logic-Flip Flops(7780)
- Logik-FIFOs Speicher(4240)
- Logik-Zähler, Trennlinien(3456)
- Logik-Vergleichsoperator(592)
- Logik-Puffer, Treiber, Receiver, Transceiver(17835)
- Linear-Video-Verarbeitung(2909)
- Linear-Vergleichsoperator(5084)
- Linear-analoge Multiplikatoren, Trennwände(263)
- Linear-Verstärker-Video Amps und Module(1905)
- Linear-Verstärker-Spezial-Zweck(1856)
- Linear - Verstärker - Instrumentierung, OP -Verstärker, Pufferverstärker(34236)
- Linear-Verstärker-Audio(4567)
- Interface-Voice Record und Playback(556)
- Schnittstelle - UARTs (Universal Asynchronous Receivers -Sender)(1236)
- Schnittstelle-Telecom(4467)
- Interface-spezialisierte(4833)
- Interface-Signal Terminatoren(333)
- Interface-Signal-Puffer, Repeater, Splitter(1449)
- Interface-Serializer, Deserializer(1480)
- Schnittstellen-Sensor und Detektor-Interfaces(1524)
- Interface-Module(169)
- Interface-Modems-ICS und Module(407)
- Interface-e/a-Expander(1136)
- Interface-Filter-aktiv(1226)
- Interface-Encoder, Decoder, Konverter(714)
- Interface-Treiber, Receiver, Transceiver(20755)
- Interface-Direct Digital Synthesis (DDS)(117)
- Interface-Controller(3628)
- Interface-Codecs(1676)
- Schnittstelle - Analoge Switches, Multiplexer, Demultiplexer(12567)
- Schnittstelle-analoge Schalter-spezieller Zweck(2533)
- Embedded-System on Chip (SoC)(4496)
- Embedded-PLDs (programmierbare Logik-Vorrichtung)(971)
- Embedded-Mikroprozessoren(10083)
- Embedded-Mikrocontroller-anwendungsspezifische(2275)
- Embedded-Mikrocontroller(99285)
- Eingebettet - Mikrocontroller, Mikroprozessor, FPGA -Module(1527)
- Eingebettet - FPGAs (Feldprogrammiergate -Array) mit Mikrocontrollern(81)
- Embedded-FPGAs (Field Programmable Gate Array)(27748)
- Embedded-DSP (Digital Signal Processors)(4081)
- Eingebettet - CPLDs (komplexe programmierbare Logikgeräte)(5187)
- Datenerfassung-Touch Screen Controller(1210)
- Datenerfassung-Digital to Analog Converter (DAC)(14419)
- Datenerfassung-digitale Potentiometer(6250)
- Datenerfassung-analog zu Digital Converters (ADC)(17776)
- Datenerfassung-analoges Frontend (AFE)(787)
- Datenerfassung-MDE/DACs-spezieller Zweck(3043)
- Clock/Timing-Uhren in Echtzeit(2446)
- Uhr/Timing - programmierbare Timer und Oszillatoren(23469)
- Clock/Timing-IC-Akkus(4)
- Takt/Timing-Delay Lines(1049)
- Uhr/Timing - Uhrengeneratoren, PLLS, Frequenzsynthesizer(32775)
- Clock/Timing-Clock Puffer, Treiber(4568)
- Clock/Timing-anwendungsspezifische(8652)
- Audio Spezial-Zweck(1564)
Relevanter Hersteller







-
Diskrete Halbleiter-Produkte
Diskrete Halbleiter-Produkte
- Aktuelle Regulierung - Dioden, Transistoren(1090)
- Transistoren-besonderer Zweck(226)
- Transistoren-programmierbare Unijunction(48)
- Transistoren-jfets(1558)
- Transistoren-IGBTs-Einzel(4799)
- Transistoren-IGBTs-Module(63420)
- Transistoren-IGBTs-Arrays(26)
- Transistoren-FETs, MOSFETs-Einzel(48330)
- Transistoren-FETs, MOSFETs-RF(4903)
- Transistoren-FETs, MOSFETs-Arrays(6641)
- Transistoren-Bipolar (BJT)-einzeln, Pre-biased(4539)
- Transistoren-Bipolar (BJT)-Einzel(25800)
- Transistoren-Bipolar (BJT)-RF(2087)
- Transistoren-bipolare (BJT)-Arrays, Pre-biased(2115)
- Transistoren-bipolare (BJT)-Arrays(2310)
- Thyristor-triacs(4044)
- Thyristoren-SCRs-Module(3967)
- Thyristoren-SCRs(5436)
- Thyristoren-diacs, sidacs(319)
- Power Driver Module(1627)
- Dioden-zenerdioden-Einzel(87483)
- Dioden-zenerdioden-Arrays(2619)
- Dioden - variable Kapazität (Varik, Varaktoren)(1200)
- Dioden-RF(2753)
- Dioden-Gleichrichter-Einzel(67528)
- Dioden-Gleichrichter-Arrays(20581)
- Dioden-Brücke-Gleichrichter(11700)
Relevanter Hersteller




-
RF/if und RFID
RF/if und RFID
- SIM -Karten für Abonnenten -Identifikationsmodul (SIM)(77)
- RF -Zirkulatoren und Isolatoren(1742)
- RFID, RF-Zugang, Monitoring-ICS(1550)
- RFID Transponder, Tags(747)
- RFID Lesegeräte(464)
- RFID -Bewertungs- und Entwicklungskits, Boards(30)
- RFID Antennen(329)
- RFI und EMI - Abschirm- und Absorbungsmaterialien(6444)
- HF und EMI-Kontakte, Fingerstock und Dichtungen(7497)
- RF Transmitter(668)
- RF Transceiver Module(6900)
- RF-Transceiver ICS(4169)
- HF-Schalter(9276)
- RF Shields(16401)
- HF-Receiver(1998)
- HF -Empfänger, Sender und Transceiver -Einheiten(2763)
- RF Power Divider/Splitter(1223)
- RF Power Controller ICs(86)
- HF-Modulatoren(710)
- HF-Mixer(2800)
- RF misc ICS und Module(3276)
- HF-Front-End (LNA + PA)(419)
- RF -Bewertungs- und Entwicklungskits, Boards(747)
- HF-gerichtete Kupplung(2718)
- RF Diplexer(1464)
- RF-Detektoren(412)
- RF-Demodulatoren(249)
- HF-Antennen(12319)
- HF-Verstärker(19651)
- Balun(1496)
- Dämpfungsglieder(4852)
Relevanter Hersteller







-
Optoelektronik
Optoelektronik
- Optomechanisch(480)
- Leuchten(125)
- Laserdioden, Lasermodule - Laserlieferung, Laserfasern(345)
- Hene Lasersysteme(31)
- Hene Laserköpfe(27)
- Hintergrundbeleuchtung anzeigen(93)
- Xenon-Beleuchtung(387)
- Touchscreen-Overlays(453)
- Panel Indicators, Pilot Lights(75729)
- Optik-Remote-Phosphor-Lichtquelle(269)
- Optik-Reflektoren(665)
- Optik-leichte Rohre(5384)
- Optik-Objektive(4951)
- LEDs-Spacer, Unentschieden(2718)
- LEDs-Lamp-Ersetzungen(29718)
- LEDs - Leiterplattenindikatoren, Arrays, Lichtstäbe, Balkendiagramme(9083)
- LED-thermische Produkte(667)
- LED-Beleuchtung(64)
- LED-Beleuchtung-weiß(37580)
- LED-Beleuchtung-Farbe(4728)
- LED-Beleuchtung-Maiskolben, Motoren, Module(28735)
- LED-Anzeige-diskret(27601)
- Laserdioden, Module(1553)
- Lampen-Glühlampen, Neons(311004)
- Lampen-Kälte-Fluoreszenz (KKL) & UV(164)
- Wechselrichter(7728)
- Infrarot, UV, sichtbare Strahler(3871)
- Fiber Optics-Transmitter-Antrieb integriert(4085)
- Fiber Optics-Transmitter-diskrete(350)
- Fiber Optics-Transceiver Module(18758)
- Fiberoptik-Switches, Multiplexer, Demultiplexer(1387)
- Fiberoptik-Receiver(695)
- Fiberoptik-Dämpfung(654)
- Elektrolumineszenz(102)
- Display, Monitor-Interface Controller(98)
- Display-Module-Vakuum-Leuchtstofflampen (VFD)(249)
- Module anzeigen-LED Dot Matrix und Cluster(865)
- Display-Module-LED-Zeichen und numerische(5421)
- Display-Module-LCD, OLED, Graphic(4654)
- Display-Module-LCD, OLED-Zeichen und numerische(2202)
- Display-Blenden, Objektive(88)
- Adresse, Spezialität(458)
Relevanter Hersteller







-
Sensoren, Wandler
Sensoren, Wandler
- Ultraschallempfänger, Sender - Industrial(115)
- Temperatursensoren - Thermostate - Mechanisch - Industrielles(3103)
- Temperatursensoren - Analog und digitaler Ausgang - Industrial(209)
- Näherungssensoren - Industrial(13611)
- Drucksensoren, Wandler - Industrie(26503)
- Optische Sensoren - Photonik - Zähler, Detektoren, SPCM (Einzelphotonzählmodul)(751)
- Optische Sensoren - Kameramodule(875)
- Magnetsensoren - Position, Nähe, Geschwindigkeit (Module) - Industrie(554)
- Kraftsensoren - Industrial(346)
- Flusssensoren - Industrielles(151)
- Float, Level Sensoren - Industrial(310)
- Encoder - Industrial(4980)
- Farbsensoren - Industrial(50)
- Berührungssensoren(100)
- Ultraschall-Receiver, Transmitter(2421)
- Temperatursensoren-Thermostat-Solid State(1096)
- Temperatursensoren-Thermostate-mechanisch(3397)
- Temperatursensoren - Thermoelemente, Temperatursonden(1921)
- Temperatursensoren - RTD (Widerstandstemperaturdetektor)(1525)
- Temperatursensoren-PTC-Thermistoren(2273)
- Temperatursensoren-ntc-thermistoren(13259)
- Temperatursensoren-Analog und Digital Output(3928)
- DMS(1399)
- Spezialisierte Sensoren(1861)
- Solarzellen(503)
- Schock-Sensoren(84)
- Sensor-Interface-Junction-Blöcke(2519)
- Sensor-Kabel-Baugruppen(22011)
- Proximity/Belegung Sensoren-fertige Einheiten(725)
- Näherungsschalter(2860)
- Drucksensoren, Wandler(11317)
- Positionssensoren - Winkel, lineare Positionsmessung(6022)
- Optische Sensoren-reflektierende-Logik-Ausgang(194)
- Optische Sensoren - reflektierend - analoge Ausgang(432)
- Optische Sensoren-Phototransistoren(1027)
- Optische Sensoren - Photointerrupter - Schlitztyp - Transistorausgang(1427)
- Optische Sensoren - Photointerrupter - Schlitztyp - Logikausgabe(1215)
- Optische Sensoren-Lichtschranke, Industrial(16763)
- Optische Sensoren-Photodioden(1543)
- Optische Sensoren-Foto-Detektoren-Remote Receiver(2605)
- Optische Sensoren-Foto-Detektoren-Logik-Ausgang(146)
- Optische Sensoren-Foto-Detektoren-CDs-Zellen(74)
- Optische Sensoren-Distanz-Messung(377)
- Optische Sensoren-Ambient Light, IR, UV Sensoren(1305)
- Multifunktions(558)
- Motion Sensors-Vibration(337)
- Motion Sensors-Tilt Schalter(67)
- Bewegungsmelder-optisch(719)
- Motion Sensors-Neigungssensoren(175)
- Motion Sensors-Imus (Trägheit-Maßeinheiten)(416)
- Motion Sensors-Kreisel(214)
- Motion Sensors-Beschleunigungsmesser(1911)
- Magnete-Sensor abgestimmt(119)
- Magnete-Multi Purpose(1965)
- Magnetische Sensoren-Schalter (Solid State)(3700)
- Magnetsensoren - Position, Nähe, Geschwindigkeit (Module)(5199)
- Magnetische Sensoren-linear, Kompass (ICS)(1247)
- Magnetsensoren - Kompass, Magnetfeld (Module)(35)
- LVDT -Wandler (linearer variabler Differentialtransformator)(204)
- IrDA Transceiver-Module(196)
- Bildsensor, Kamera(2235)
- Feuchtigkeit-Sensoren(1425)
- Gas-Sensoren(1217)
- Force Sensoren(188)
- Durchfluss-Sensoren(550)
- Float, Level Sensoren(1343)
- Encoder(6357)
- Staub-Sensoren(43)
- Aktuelle Wandler(3455)
- Color Sensoren(85)
- Verstärker(1905)
Relevanter Hersteller







-
Anschlüsse, Verbindungen
Anschlüsse, Verbindungen
- USB, DVI, HDMI -Stecker(446)
- Festkörperbeleuchtungsstecker(555)
- Steckdosen für ICs, Transistoren(953)
- Steckbare Steckverbinder(1221)
- Photovoltaik (Solarpanel) Anschlüsse(136)
- Glasfaseranschlüsse(370)
- FFC, FPC (flache flexible) Anschlüsse(761)
- D-Sub, D-förmige Stecker(2887)
- Koaxialverbinder (RF)(2389)
- Rundanschlüsse(14162)
- Stromanbeter Blade Type(273)
- Stecker und Behälter(2597)
- USB, DVI, HDMI Stecker-Adapter(572)
- USB, DVI, HDMI -Stecker(4298)
- Klemmen-Wire to Board Steckverbinder(217)
- Klemmen-Draht-Steckverbinder(4322)
- Klemmen-Draht-Pin Stecker(328)
- Terminals-Revolver Steckverbinder(1273)
- Terminals-spezialisierte Steckverbinder(2042)
- Klemmen-Spaten Verbinder(3902)
- Klemmen-Löten/Stecker(345)
- Klemmen-Verschraubungen(745)
- Klemmen-Ring Steckverbinder(12596)
- Klemmen-rechteckige Steckverbinder(4747)
- Terminals - Schnellverbindungen, schnelle Trennungsanschlüsse(8514)
- Klemmen-PC PIN, Single Post Connectors(3776)
- Klemmen-PC-Pin-Buchsen, Sockel-Steckverbinder(5883)
- Klemmen-magnetische Draht-Steckverbinder(1653)
- Klemmen-Messer Steckverbinder(112)
- Klemmen-Gehäuse, Stiefel(2850)
- Klemmen-Folie Steckverbinder(108)
- Klemmen-Barrel, Bullet-Steckverbinder(1107)
- Klemmen-Adapter(137)
- Terminal-Streifen und Revolver-Boards(1159)
- Terminal Junction Systeme(2533)
- Anschlussblöcke-Draht an Bord(43615)
- Terminal Blocks-spezialisierte(3722)
- Terminal Blocks-Power Distribution(847)
- Anschlussblöcke-Panel Mount(1359)
- Terminal Blocks-Interface Module(1819)
- Anschlussblöcke-Kopfzeilen, Stecker und Buchsen(119920)
- Anschlussblöcke-DIN-Schiene, Kanal(9373)
- Anschlussblöcke-Kontakte(65)
- Anschlussblöcke-Barrier Blocks(47517)
- Anschlussblöcke-Adapter(1059)
- Solid State Lighting Verbinder-Kontakte(271)
- Festkörperbeleuchtungsstecker(1344)
- Buchsen für ICS, Transistoren-Adapter(275)
- Steckdosen für ICs, Transistoren(22148)
- Shunts, Jumper(907)
- Rechteckige Verbinder-Feder geladen(7721)
- Rechteckige Steckverbinder-Gehäuse(43023)
- Rechteckige Verbinder-Kopfzeilen, Spezial-PIN(6129)
- Rechteckige Anschlüsse - Header, Gefäße, weibliche Sockel(229601)
- Rechteckige Verbinder-Kopfzeilen, männliche Pins(543338)
- Rechteckige Anschlüsse - kostenloses Hängen, Panelhalterung(30142)
- Rechteckige Verbinder-Kontakte(10681)
- Rechteckige Anschlüsse - Board in, Direktdraht zum Board(2432)
- Rechteckige Verbinder-Adapter(475)
- Rechteckig - Brett zu Board -Steckern - Header, Behälter, weibliche Sockel(9)
- Rechteckig - Brett zu Board -Steckern - Header, männliche Stifte(2)
- Rechteckige Anschlüsse - Board -Abstandshalter, Stacker (Board zu Board)(238901)
- Rechteckige Anschlüsse - Arrays, Kantentyp, Mezzanin (Board zu Board)(37853)
- Stromanschluss-Eingänge, Steckdosen, Module(10310)
- Steckbare Steckverbinder(6049)
- Photovoltaik- (Solarpanel) Anschlüsse - Kontakte(77)
- Photovoltaik (Solarpanel) Anschlüsse(504)
- Modulare Steckverbinder-Verdrahtung Blöcke(99)
- Modulare Steckverbinder-Stecker(1674)
- Modulare Steckverbinder-Stecker Gehäuse(181)
- Modulare Steckverbinder-Buchsen mit magnetischen(10152)
- Modulare Steckverbinder-Buchsen(23416)
- Modulare Steckverbinder-Adapter(855)
- Memory Connectors-PC Cards-Adapter(21)
- Memory Connectors-PC Card Sockets(3299)
- Memory Connectors-Inline Modul Sockets(3390)
- LGH Steckverbinder(764)
- Keystone-Einsätze(2758)
- Keystone-Frontplatte, Frames(1926)
- Heavy Duty Steckverbinder-Einsätze, Module(4190)
- Schwerlastanschlüsse - Gehäuse, Kapuzen, Basen(17226)
- Heavy Duty Steckverbinder-Frames(523)
- Heavy Duty Steckverbinder-Kontakte(1832)
- Heavy Duty Steckverbinder-Baugruppen(671)
- LWL-Steckverbinder-Gehäuse(919)
- Glasfaser-Steckverbinder - Adapter(4455)
- LWL-Steckverbinder(3001)
- FFC, FPC (flache flexible) Steckverbinder - Gehäuse(652)
- FFC, FPC (flache flexible) Anschlüsse - Kontakte(202)
- FFC, FPC (flache flexible) Anschlüsse(18691)
- D-Sub, d-förmige Steckverbinder-Terminatoren(47)
- D-Sub, d-förmige Steckverbinder-Gehäuse(12238)
- D-Sub, d-förmige Steckverbinder-Kontakte(2714)
- D-Sub, D-förmige Steckverbinder-Rückenschalen, Kapuzen(5995)
- D-Sub, d-förmige Steckverbinder-Adapter(1304)
- D-Sub Steckverbinder(141346)
- D-förmige Steckverbinder-Centronics(8770)
- Kontakte, Frühling geladen und Druck(630)
- Kontakte-Multi Purpose(6196)
- Kontakte-"Leadframe"(122)
- Koaxial-Steckverbinder (RF)-Terminatoren(1231)
- Koaxial-Steckverbinder (RF)-Kontakte(480)
- Koaxial-Steckverbinder (RF)-Adapter(6386)
- Koaxialverbinder (RF)(25734)
- Rundsteckverbinder-Gehäuse(441226)
- Rundsteckverbinder-Kontakte(4737)
- Rundsteckverbinder-backschalen und Kabel-Klemmen(53692)
- Rundsteckverbinder-Adapter(8839)
- Rundanschlüsse(1196254)
- Card Edge Steckverbinder-Gehäuse(469)
- Karte Edge Verbinder-edgeboard Verbinder(672683)
- Card Edge Verbinder-Kontakte(325)
- Card Edge Verbinder-Adapter(73)
- Blade Type Power Steckverbinder-Gehäuse(837)
- Blade Type Power Connectors-Kontakte(393)
- Stromanbeter Blade Type(4163)
- Zwischen Serien-Adapter(649)
- Barrel-Stromanschluss(935)
- Barrel-Audio-Anschlüsse(2432)
- Barrel-Audio Adapter(92)
- Banana und Tip Steckverbinder-Buchsen, Stecker(1644)
- Banana and Tip Connectors-Binding Posts(239)
- Banana und Tip Steckverbinder-Adapter(75)
- Backplane Steckverbinder-spezialisiert(45586)
- Backplane Steckverbinder-Gehäuse(6863)
- Backplane Steckverbinder-Hard metrisch, Standard(6297)
- Backplane Steckverbinder-DIN 41612(9408)
- Backplane Steckverbinder-Kontakte(3583)
- Backplane Connectors-ARINC Einsätze(2357)
- Backplane Steckverbinder-ARINC(3789)
Relevanter Hersteller







-
Widerstände
-
Kondensatoren
Kondensatoren
- Aluminium-Elektrolytkondensatoren(16817)
- Trimmer, Variable Kondensatoren(3151)
- Dünne Folien-Kondensatoren(3473)
- Tantal-Kondensatoren(136103)
- Tantal-Polymer-Kondensatoren(9778)
- Silizium-Kondensatoren(320)
- Niob Oxide Kondensatoren(330)
- Mica und PTFE Kondensatoren(9101)
- Folien-Kondensatoren(150406)
- Elektrische Doppelschichtkondensatoren (EDLC), Superkondensatoren(2782)
- Keramische Kondensatoren(833829)
- Kondensatoren-Netzwerke, Arrays(2383)
- Aluminium-Elektrolytkondensatoren(125325)
- Aluminium-Polymer-Kondensatoren(7544)
Relevanter Hersteller






-
Transformatoren
Transformatoren
Relevanter Hersteller







-
Isolatoren
-
Kristalle, Oszillatoren, Resonatoren
Kristalle, Oszillatoren, Resonatoren
Relevanter Hersteller






-
Switches
Switches
- Verriegelungsschalter(2893)
- Emergency-Stop-Schalter (E-Stop)(1160)
- Kabelzugschalter(571)
- Toggle-Schalter(33608)
- Rändelrads Schalter(742)
- Schalter(14263)
- Snap-Aktion, Endschalter begrenzen(28077)
- Slide-Schalter(5166)
- Selector-Schalter(9720)
- Rotary Switches(13850)
- Rocker Schalter(53790)
- Drucktaste-Schalter-Hall-Effekt(127)
- Drucktaste Schalter(190826)
- Programmierbare Display-Switches(39)
- Navigations-Schalter, Joystick(1882)
- Magnetische, Reed-Schalter(1399)
- Keypad-Schalter(637)
- Keylock Schalter(3684)
- DIP Schalter(7747)
- Konfigurierbare Switch-Komponenten-Objektiv(1435)
- Konfigurierbare Schalter-Komponenten-Lichtquelle(1236)
- Konfigurierbare Switch-Komponenten-Contact Block(1401)
- Konfigurierbare Switch-Komponenten-Body(16077)
- Disconnect-Switch-Komponenten(2567)
Relevanter Hersteller






-
Relais
Relais
- Sicherheitsrelais(1310)
- Reedrelais(1735)
- Hochfrequenz (RF) -Relais(1190)
- Schütze (Festkörper)(686)
- Schütze (elektromechanisch)(11952)
- Kfz-Relais(1881)
- Solid State Relais(10652)
- Signal-Relais, bis zu 2 Ampere(9149)
- Relay-Sockets(2075)
- Power Relays, über 2 Ampere(31604)
- E / A-Relaismodule(712)
- I/o-Relay-Module-Input(2)
- I/o-Relay-Modul-Racks(247)
Relevanter Hersteller
















Sprache auswählen
Aktuelle Sprache
Deutsch
- English
- Deutsch
- Italia
- Français
- 日本語
- 한국의
- русский
- Svenska
- Nederland
- español
- Português
- polski
- Suomi
- Gaeilge
- Slovenská
- Slovenija
- Čeština
- Melayu
- Magyarország
- Hrvatska
- Dansk
- românesc
- Indonesia
- Ελλάδα
- Български език
- Afrikaans
- IsiXhosa
- isiZulu
- lietuvių
- Maori
- Kongeriket
- Монголулс
- O'zbek
- Tiếng Việt
- हिंदी
- اردو
- Kurdî
- Català
- Bosna
- Euskera
- العربية
- فارسی
- Corsa
- Chicheŵa
- עִבְרִית
- Latviešu
- Hausa
- Беларусь
- አማርኛ
- Republika e Shqipërisë
- Eesti Vabariik
- íslenska
- မြန်မာ
- Македонски
- Lëtzebuergesch
- საქართველო
- Cambodia
- Pilipino
- Azərbaycan
- ພາສາລາວ
- বাংলা ভাষার
- پښتو
- malaɡasʲ
- Кыргыз тили
- Ayiti
- Қазақша
- Samoa
- සිංහල
- ภาษาไทย
- Україна
- Kiswahili
- Cрпски
- Galego
- नेपाली
- Sesotho
- Тоҷикӣ
- Türk dili
- ગુજરાતી
- ಕನ್ನಡkannaḍa
- मराठी
Wie funktioniert das BNO055-Sensormodul?
Zeit: 2026/02/11
Durchsuchen: 182
Moderne Bewegungssteuerungssysteme erfordern genaue, stabile und einfach zu integrierende Orientierungserkennungslösungen.Das intelligente 9-Achsen-Absolutorientierungssensormodul BNO055 erfüllt diesen Bedarf.In diesem Artikel werden das Funktionsprinzip, die Pin-Konfiguration, die Kommunikationsmodi, Spezifikationen, Funktionen, Anwendungen, Alternativen und Herstellerdetails des BNO055-Sensors erläutert.
Katalog
Was ist das BNO055-Sensormodul?
Die BNO055 Das Sensormodul ist ein intelligenter 9-Achsen-Absolutorientierungssensor, der von Bosch Sensortec entwickelt wurde.Es integriert drei Sensorkomponenten in einem einzigen Chip: einen 3-Achsen-Beschleunigungsmesser, ein 3-Achsen-Gyroskop und ein 3-Achsen-Magnetometer.Diese Sensoren arbeiten zusammen, um Bewegung, Drehung, Neigung und Richtung im dreidimensionalen Raum zu erkennen.
Im Gegensatz zu herkömmlichen IMU-Sensoren, die Rohdaten ausgeben, verfügt der BNO055 über einen internen Mikrocontroller, der die Sensorfusion durchführt.Dies bedeutet, dass es Bewegungsdaten intern verarbeitet und gebrauchsfertige Ausgaben wie Euler-Winkel, Quaternionen, Schwerkraftvektor und lineare Beschleunigung bereitstellt.Aufgrund dieser integrierten Verarbeitungsfähigkeit reduziert der BNO055 die Programmierkomplexität und beschleunigt die Produktentwicklung.Es wird häufig in der Robotik, Drohnen, AR/VR-Geräten und Bewegungsverfolgungssystemen eingesetzt.
Wenn Sie Interesse am Kauf des Sensormoduls BNO055 haben, kontaktieren Sie uns bitte bezüglich Preis und Verfügbarkeit.
Wie funktioniert das BNO055-Modul?
Das BNO055-Modul funktioniert durch die Kombination der Daten seiner drei internen Sensoren.Der Beschleunigungsmesser misst die lineare Beschleunigung und Neigung, das Gyroskop erkennt Rotationsbewegungen und das Magnetometer erkennt die Kompassrichtung des Erdmagnetfelds.
Im Inneren des Chips führt ein dedizierter Prozessor fortschrittliche Sensorfusionsalgorithmen aus.Diese Algorithmen filtern Rauschen, korrigieren Drift und kombinieren alle Bewegungsdaten, um eine stabile und genaue absolute Ausrichtung zu berechnen.Anstatt komplexe mathematische Berechnungen in Ihrem Hauptmikrocontroller durchzuführen, liefert der BNO055 verarbeitete Orientierungsdaten direkt über I²C- oder UART-Kommunikation.Dies macht es effizient, genau und einfach in eingebettete Systeme zu integrieren, die eine zuverlässige Bewegungserkennung erfordern.
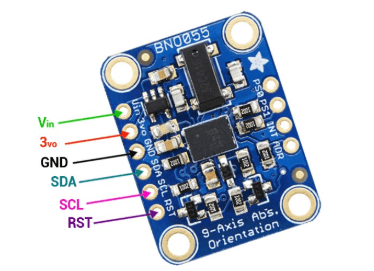
Details zur Pinbelegung des BNO055-Moduls
|
Pin
Name |
Beschreibung |
Funktion |
|
Fahrgestellnummer |
Eingangsspannung |
Hauptstromeingang
für das Modul (typischerweise 3,3 V–5 V, abhängig vom Platinenregler). |
|
3VO |
3,3 V Ausgang |
Geregelte 3,3 V
Ausgang vom integrierten Spannungsregler (kann kleine externe Geräte mit Strom versorgen).
Schaltkreise). |
|
GND |
Boden |
Gemeinsamkeit
Referenz für Leistung und Signale. |
|
SDA |
Serielle Datenleitung |
I²C-Datenleitung
Wird zur Kommunikation mit einem Mikrocontroller verwendet. |
|
SCL |
Serielle Uhr
Linie |
I²C-Taktleitung
Wird zur Synchronisierung der Datenübertragung verwendet. |
|
RST |
Zurücksetzen |
Setzt die zurück
BNO055-Sensor, wenn er nach unten gezogen wird. |
Alternativen und gleichwertiges Modell
• BNO080
• BNO085
• LSM9DS1
BNO055-Modul-Kommunikationskonfigurationen
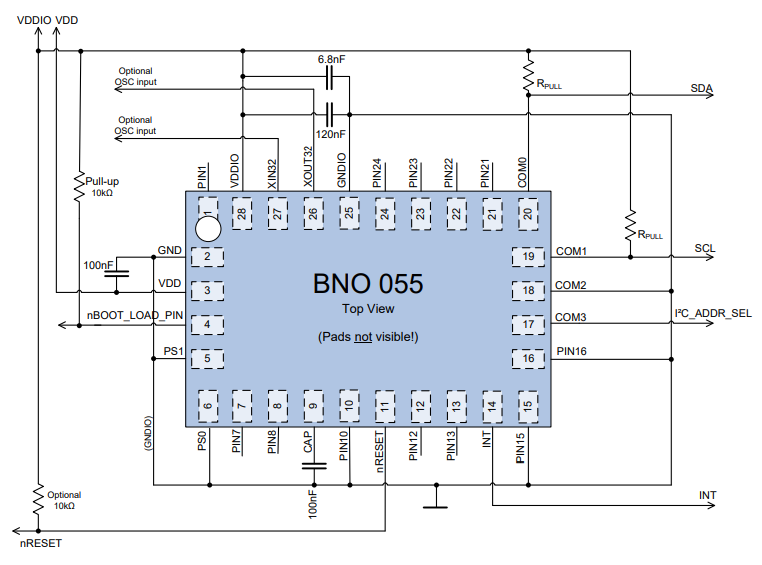
I2C-Konfiguration
In der I2C-Konfiguration kommuniziert der BNO055 mit dem Host-Mikrocontroller über zwei Hauptleitungen: SDA (Serial Data) und SCL (Serial Clock).Beide Leitungen erfordern Pull-up-Widerstände für VDDIO, da I2C eine Open-Drain-Kommunikationsmethode verwendet.Das Diagramm zeigt diese Pull-up-Widerstände, die mit den Daten- und Taktleitungen verbunden sind, um die richtigen Logikpegel sicherzustellen.
Die VDD- und VDDIO-Pins werden mit Strom versorgt und mithilfe von Kondensatoren (typischerweise 100 nF und zusätzlichen Filterkondensatoren) ordnungsgemäß entkoppelt, um die Versorgungsspannung zu stabilisieren.Der nRESET-Pin kann extern gesteuert werden, während die PS0- und PS1-Pins für die Auswahl des I2C-Modus konfiguriert sind.Diese Konfiguration wird aufgrund ihrer Einfachheit und der Unterstützung mehrerer Geräte am selben Bus häufig mit Arduino, ESP32 und Raspberry Pi verwendet.
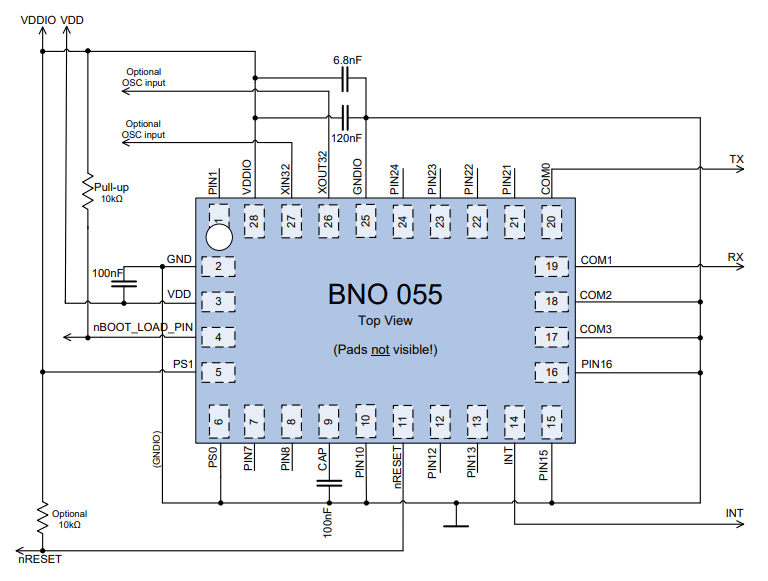
UART-Konfiguration
In der UART-Konfiguration kommuniziert der BNO055 über TX- (Senden) und RX- (Empfangen) Leitungen.Im Gegensatz zu I2C benötigt UART keine Pull-up-Widerstände auf Kommunikationsleitungen, da es Push-Pull-Treiber verwendet.Der TX-Pin des Sensors wird mit dem RX-Pin des Mikrocontrollers verbunden, und der RX-Pin wird mit dem TX-Pin des Mikrocontrollers verbunden.
Stromanschlüsse und Entkopplungskondensatoren bleiben die gleichen wie im I2C-Modus, um einen stabilen Betrieb zu gewährleisten.Die PS0- und PS1-Pins sind unterschiedlich konfiguriert, um den UART-Modus zu aktivieren.Diese Konfiguration ist nützlich für Punkt-zu-Punkt-Kommunikation und Anwendungen, bei denen eine einfache serielle Schnittstelle bevorzugt wird.
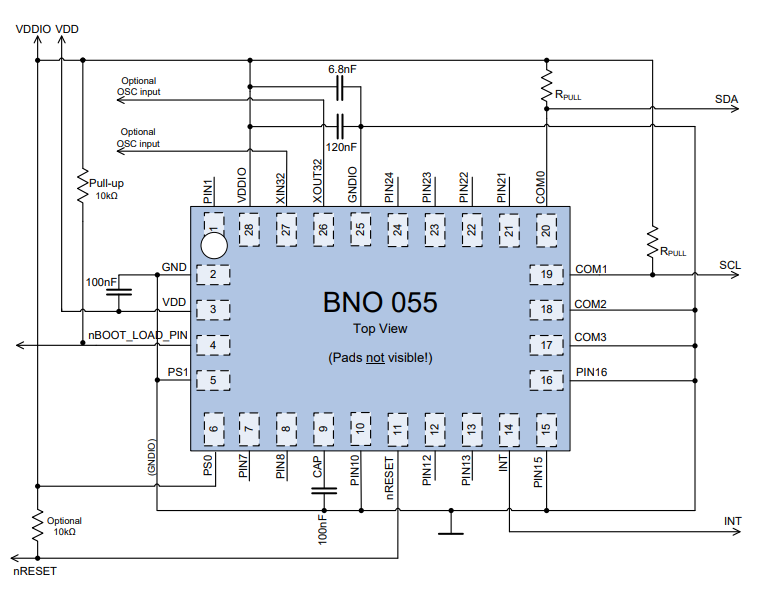
HID-I2C-Konfiguration
Die HID-I2C-Konfiguration wird hauptsächlich verwendet, wenn der BNO055 mit Systemen verbunden ist, die das Human Interface Device (HID)-Protokoll über I2C unterstützen, wie z. B. Windows-basierte Plattformen.In diesem Setup werden weiterhin die SDA- und SCL-Leitungen für die Kommunikation verwendet, das Gerät folgt jedoch den HID-Kommunikationsstandards.
Das Diagramm zeigt Pull-up-Widerstände an SDA und SCL, die ordnungsgemäße Filterung der Spannungsversorgung und die zusätzliche Konfiguration von Steuerpins wie COM-Leitungen und Interrupt (INT).Der INT-Pin ist im HID-Modus wichtig, da er dem Host signalisiert, wenn neue Daten verfügbar sind.Durch diese Konfiguration kann der Sensor als Plug-and-Play-Bewegungsgerät erkannt werden, ohne dass eine komplexe Treiberentwicklung erforderlich ist.
BNO055-Modulspezifikationen
BNO055 IC-Spezifikationen
|
Parameter |
Spezifikation |
|
Sensortyp |
9-Achsen-Absolutwert
Orientierungssensor |
|
Integriert
Sensoren |
3-Achsen
Beschleunigungsmesser, 3-Achsen-Gyroskop, 3-Achsen-Magnetometer |
|
Sensorfusion |
Eingebaut
Mikrocontroller mit integriertem Fusionsalgorithmus |
|
Ausgabedaten |
Euler-Winkel,
Quaternionen, Linearbeschleunigung, Schwerkraftvektor, Rohdaten |
|
Beschleunigungsmesser
Reichweite |
±2g, ±4g, ±8g,
±16g |
|
Gyroskop-Reichweite |
±125 bis ±2000
dps |
|
Magnetometer
Reichweite |
±1300 µT (X/Y),
±2500 µT (Z) |
|
Betrieb
Spannung |
2,4V – 3,6V |
|
Typischer Strom
Verbrauch |
~12 mA (Fusion
Modus) |
|
Kommunikation
Schnittstelle |
I²C, UART,
HID-I²C |
|
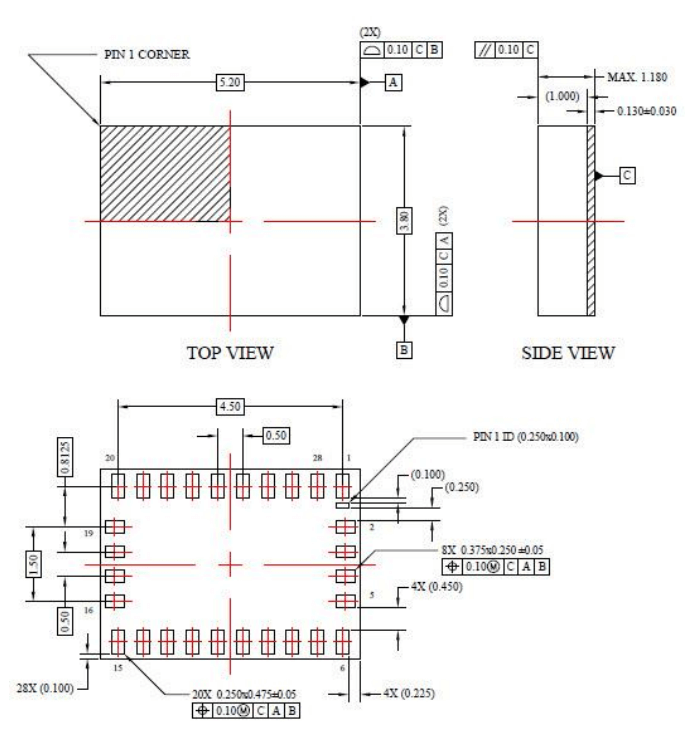
Paket |
28-Pin-LGA (5.2
× 3,8 × 1,1 mm) |
|
Betrieb
Temperatur |
−40 °C bis +85 °C |
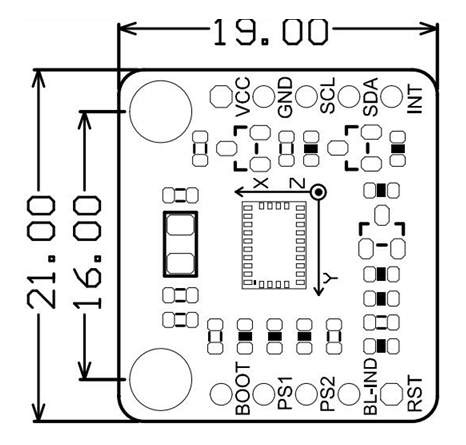
BNO055-Modul (Breakout-Board)
|
Parameter |
Spezifikation |
|
Sensortyp |
BNO055 9-Achsen
Orientierungssensormodul |
|
Integrierter IC |
Bosch BNO055 |
|
Eingangsspannung
(Fahrgestellnummer) |
3,3V – 5V
(abhängig vom Bordregler) |
|
Logikspannung |
3,3 V |
|
Kommunikation
Schnittstelle |
I²C (die meisten
(üblich), einige Boards unterstützen UART |
|
Ausgabedaten |
Absolut
Orientierung, Euler-Winkel, Quaternionen, Rohdaten des Sensors |
|
Typischer Strom
Verbrauch |
~12–15 mA |
|
An Bord
Komponenten |
Spannung
Regler, Pull-up-Widerstände, Entkopplungskondensatoren |
|
Montage |
Platine mit Header
Stifte und Befestigungslöcher |
|
Betrieb
Temperatur |
−40 °C bis +85 °C
(boardabhängig) |
Funktionen des BNO055-Moduls
BNO055 Sensor (IC)
• 9-Achsen-Absolutorientierungssensor mit integrierter Sensorfusion
• Gibt Quaternion, Euler-Winkel, Rotationsvektor, lineare Beschleunigung, Schwerkraft und Kurs aus
• Integriertes 3-Achsen-16-Bit-Gyroskop
• Integrierter 3-Achsen-14-Bit-Beschleunigungsmesser
• Integrierter geomagnetischer (Magnetometer-)Sensor
• Eingebauter Mikrocontroller für intelligente Sensorfusion
• LGA 28-Pin-Kompaktgehäuse (3,8 × 5,2 mm, Höhe ~1,1 mm)
• Betriebsspannung (VDD): 2,4 V bis 3,6 V
• VDDIO-Spannungsbereich: 1,7 V bis 3,6 V
• Kommunikationsschnittstellen: HID-I2C (kompatibel mit Windows 8.x), I²C, UART
• Intelligentes Energiemanagement: Normal-, Energiespar- und Suspend-Modus
• Betriebstemperatur: −40 °C bis +85 °C
• RoHS-konform, halogenfrei
Beschleunigungsmesserfunktionen
• Wählbare Beschleunigungsbereiche: ±2g, ±4g, ±8g, ±16g
• Konfigurierbare Tiefpassfilterbandbreite (1 kHz bis <8 Hz)
• Mehrere Betriebsmodi: Normal, Suspend, Low Power, Standby, Deep Suspend
• Bewegungsgesteuerte Interrupt-Generierung
-Erkennung jeder Bewegung
-Erkennung langsamer oder keiner Bewegung
-High-g-Erkennung
Funktionen des BNO055-Moduls (Breakout-Board).
• Integrierter Bosch BNO055 9-Achsen-Ausrichtungs-IC
• Integrierter Spannungsregler (unterstützt 3,3 V–5 V Eingang an Fahrgestellnummer, abhängig von der Platine)
• Vorinstallierte I²C-Pull-Up-Widerstände
• Entkopplungskondensatoren für stabile Stromversorgung
• Stiftleisten für einfachen Mikrocontroller-Anschluss
• Befestigungslöcher für sichere Installation
• Kompakter PCB-Formfaktor für eingebettete Projekte
• Unterstützt I²C (am häufigsten) und UART (bei ausgewählten Modulen)
Breite Anwendungen für das BNO055-Modul
• Robotik und Roboterarme
• Selbstbalancierende Roboter
• Drohnen und UAV-Lagekontrolle
• Autonome Fahrzeuge
• Virtual-Reality-Systeme (VR).
• Augmented Reality (AR)-Geräte
• Bewegungsverfolgungssysteme
• Tragbare Fitnessgeräte
• Gaming-Controller
• Head-Tracking-Geräte
• Navigations- und Positionierungssysteme
• Industrielle Automatisierungssysteme
• Kamerastabilisierungssysteme
• Gestenerkennungssysteme
• Intelligente IoT-Geräte
BNO055 vs. BNO085: Was ist der Unterschied?
BNO055 und BNO085 sind beide 9-Achsen-Absolutorientierungssensoren mit integrierter Sensorfusion, unterscheiden sich jedoch in Leistung und Leistungsfähigkeit.Der BNO055 integriert einen Beschleunigungsmesser, ein Gyroskop, ein Magnetometer und einen internen Mikrocontroller, der die Sensorfusion intern verarbeitet.Es bietet gebrauchsfertige Ausgaben wie Euler-Winkel und Quaternionen und erleichtert so die Verwendung in Robotik, Drohnen und eingebetteten Systemen.
Der BNO085 basiert auf der SH-2-Sensor-Hub-Technologie von Hillcrest Laboratories und bietet eine fortschrittlichere Bewegungsverfolgung und verbesserte Genauigkeit.Es unterstützt leistungsfähigere Algorithmen, eine bessere dynamische Kalibrierung und zusätzliche Funktionen wie Aktivitätsklassifizierung und verbesserte Stabilität bei sich schnell bewegenden Anwendungen.
Mechanische Abmessungen
Hersteller
Bosch Sensortec stellt den BNO055-Sensor mithilfe fortschrittlicher MEMS-Technologie (Micro-Electro-Mechanical Systems) und hochautomatisierten Halbleiterproduktionsprozessen her.Als Tochtergesellschaft von Bosch mit umfassender Expertise im Bereich Automobilsensoren nutzt das Unternehmen die Präzisionswaferfertigung, das firmeninterne ASIC-Design und strenge Qualitätskontrollsysteme, um hohe Zuverlässigkeit, Genauigkeit und Langzeitstabilität zu gewährleisten.Der BNO055 integriert mehrere MEMS-Sensorelemente und einen Mikrocontroller mit Sensorfusions-Firmware in einem kompakten LGA-Gehäuse und spiegelt die Fähigkeit von Bosch bei der Miniaturisierung und Systemintegration wider.
Datenblatt PDF
BNO055 Datenblatt:
BNO055.pdfHäufig gestellte Fragen [FAQ]
1. Muss der BNO055 vor der Verwendung kalibriert werden?
Ja.Der BNO055 unterstützt die automatische Kalibrierung, aber die manuelle Bewegung in verschiedene Ausrichtungen verbessert die Genauigkeit.Der Kalibrierungsstatus kann über spezielle Register überprüft werden.
2. Wie genau ist die BNO055-Ausrichtungsausgabe?
Die Ausrichtungsgenauigkeit liegt typischerweise im Bereich weniger Grad, abhängig von magnetischen Umgebungseinflüssen und der richtigen Kalibrierung.
3. Kann BNO055 ohne Magnetometer funktionieren?
Ja.Es unterstützt mehrere Betriebsmodi, einschließlich des IMU-Modus (nur Beschleunigungsmesser + Gyroskop), die Kursgenauigkeit kann jedoch abnehmen.
4. Welche Mikrocontroller sind mit BNO055 kompatibel?
Es funktioniert mit Arduino, ESP32, STM32, Raspberry Pi und den meisten 3,3-V-Logik-Mikrocontrollern über I²C oder UART.
5. Warum kommt es bei BNO055 zu einer Kursdrift?
Drift kann aufgrund magnetischer Interferenzen, falscher Kalibrierung oder in der Nähe befindlicher Metallobjekte auftreten, die das Magnetometer beeinflussen.
6. Wie hoch ist die maximale Datenausgaberate von BNO055?
Abhängig vom gewählten Betriebsmodus und der gewählten Schnittstelle unterstützt der Sensor konfigurierbare Ausgangsdatenraten.
Verwandter Artikel
-
![Vollständige Anleitung zum Luftqualitäts-Gassensormodul CCS811]() Feb 12 2026Vollständige Anleitung zum Luftqualitäts-Gassensormodul CCS811
Feb 12 2026Vollständige Anleitung zum Luftqualitäts-Gassensormodul CCS811Die Luftqualität in Innenräumen wird immer wichtiger, da die Menschen mehr Zeit in Häusern, Büros, Klassenzimmern und Industrieumgebungen verbring... -
![Leitfaden zum Datenblatt des Atmosphärendrucksensors BMP180]() Feb 11 2026Leitfaden zum Datenblatt des Atmosphärendrucksensors BMP180
Feb 11 2026Leitfaden zum Datenblatt des Atmosphärendrucksensors BMP180Der Atmosphärendrucksensor BMP180 ist ein kompakter und hochintegrierter digitaler barometrischer Sensor, der über eine einfache I²C-Schnittstelle ...


Verwandte -Produkte

GRM0225C1E7R7WA03L
CAP CER 7.7PF 25V C0G/NP0 01005
06035C331MAT2A
CAP CER 330PF 50V X7R 0603

TAP226M035FCS
CAP TANT 22UF 20% 35V RADIAL

2N7002KW
MOSFET N-CH 60V 310MA SC70

P2020PSE2KZB
IC MPU Q OR IQ 1.2GHZ 689TEBGA

TUSB8020BIPHPR
IC USB 3.0 HUB 2 PORT 48HTQFP

IDT71V016SA12PHI
IC SRAM 1MBIT PARALLEL 44TSOP II

QM100E3Y-H
IGBT Modules

F3062F25V
F3062F25V HIT
TCC760HC01-A
TELECHIPS QFP

74HCT374N
74HCT374N PHI
DP8816AP
DP8816AP DP

TC74VHC125FTEL
TC74VHC125FTEL TOS