Alle Kategorien
-
Integrierte schaltkreise (ICS)
Integrierte schaltkreise (ICS)
- Schnittstelle - Sensor, kapazitive Berührung(642)
- Spezialisierte ICS(12302)
- PMIC-Spannungsregler-besonderer Zweck(5644)
- PMIC-Spannungsregler-lineare Regler(793)
- PMIC-Spannungsregler-linear + Switching(1829)
- PMIC-Spannungsregler-linear(70981)
- PMIC-Spannungsregler-DC DC Switching Regulators(39569)
- PMIC-Regler-DC-DC-Switching-Controller(13507)
- PMIC-Spannungs-Referenz(9453)
- PMIC-v/f und f/v-Wandler(145)
- PMIC-Thermal Management(592)
- PMIC-Supervisor(47946)
- PMIC-RMS bis DC-Wandler(170)
- PMIC-Netzteil-Controller, Monitore(2104)
- PMIC-Power over Ethernet (PoE) Controller(1008)
- PMIC-Power Management-spezialisierte(7722)
- PMIC-Netzschalter, Treiber laden(7706)
- PMIC-PFC (Power Factor Correction)(1222)
- PMIC oder Steuerungen, ideale Dioden(705)
- PMIC-Motor-Treiber, Regler(4712)
- PMIC-Beleuchtung, Ballast-Regler(560)
- PMIC-LED-Treiber(7282)
- PMIC-Laser-Treiber(573)
- PMIC-Hot-Swap-Controller(2816)
- PMIC-Gate-Treiber(7083)
- PMIC-voll, Half-Bridge-Treiber(1342)
- PMIC-Energy Messung(654)
- PMIC-Display-Treiber(1435)
- PMIC-derzeitige Regulierung/Management(1481)
- PMIC-Batterie-Management(5553)
- PMIC-Ladegeräte(3831)
- PMIC-AC DC Konverter, Offline Schalter(4905)
- Memory-Controller(358)
- Memory-Konfigurations-Proms für FPGAs(639)
- Speicher-Akkus(13)
- Erinnerung(65694)
- Logic-universelle Bus-Funktionen(706)
- Logic-Übersetzer, Level-Shifter(2854)
- Logik-Specialty Logic(1870)
- Logik-Signal-Schalter, Multiplexer, Decoder(9420)
- Logic-Shift-Register(2665)
- Logic-Parity Generatoren und Checkers(335)
- Logic-multivibratoren(831)
- Logik-Latches(3658)
- Logik - Tore und Wechselrichter - Multifunktion, konfigurierbar(1687)
- Logik-Tore und Wechselrichter(16453)
- Logic-Flip Flops(7780)
- Logik-FIFOs Speicher(4240)
- Logik-Zähler, Trennlinien(3456)
- Logik-Vergleichsoperator(592)
- Logik-Puffer, Treiber, Receiver, Transceiver(17835)
- Linear-Video-Verarbeitung(2909)
- Linear-Vergleichsoperator(5084)
- Linear-analoge Multiplikatoren, Trennwände(263)
- Linear-Verstärker-Video Amps und Module(1905)
- Linear-Verstärker-Spezial-Zweck(1856)
- Linear - Verstärker - Instrumentierung, OP -Verstärker, Pufferverstärker(34236)
- Linear-Verstärker-Audio(4567)
- Interface-Voice Record und Playback(556)
- Schnittstelle - UARTs (Universal Asynchronous Receivers -Sender)(1237)
- Schnittstelle-Telecom(4467)
- Interface-spezialisierte(4833)
- Interface-Signal Terminatoren(333)
- Interface-Signal-Puffer, Repeater, Splitter(1449)
- Interface-Serializer, Deserializer(1480)
- Schnittstellen-Sensor und Detektor-Interfaces(1524)
- Interface-Module(169)
- Interface-Modems-ICS und Module(407)
- Interface-e/a-Expander(1136)
- Interface-Filter-aktiv(1226)
- Interface-Encoder, Decoder, Konverter(714)
- Interface-Treiber, Receiver, Transceiver(20755)
- Interface-Direct Digital Synthesis (DDS)(117)
- Interface-Controller(3628)
- Interface-Codecs(1676)
- Schnittstelle - Analoge Switches, Multiplexer, Demultiplexer(12567)
- Schnittstelle-analoge Schalter-spezieller Zweck(2533)
- Embedded-System on Chip (SoC)(4496)
- Embedded-PLDs (programmierbare Logik-Vorrichtung)(971)
- Embedded-Mikroprozessoren(10083)
- Embedded-Mikrocontroller-anwendungsspezifische(2275)
- Embedded-Mikrocontroller(99285)
- Eingebettet - Mikrocontroller, Mikroprozessor, FPGA -Module(1527)
- Eingebettet - FPGAs (Feldprogrammiergate -Array) mit Mikrocontrollern(81)
- Embedded-FPGAs (Field Programmable Gate Array)(27747)
- Embedded-DSP (Digital Signal Processors)(4081)
- Eingebettet - CPLDs (komplexe programmierbare Logikgeräte)(5187)
- Datenerfassung-Touch Screen Controller(1210)
- Datenerfassung-Digital to Analog Converter (DAC)(14419)
- Datenerfassung-digitale Potentiometer(6250)
- Datenerfassung-analog zu Digital Converters (ADC)(17776)
- Datenerfassung-analoges Frontend (AFE)(787)
- Datenerfassung-MDE/DACs-spezieller Zweck(3043)
- Clock/Timing-Uhren in Echtzeit(2446)
- Uhr/Timing - programmierbare Timer und Oszillatoren(23469)
- Clock/Timing-IC-Akkus(4)
- Takt/Timing-Delay Lines(1049)
- Uhr/Timing - Uhrengeneratoren, PLLS, Frequenzsynthesizer(32775)
- Clock/Timing-Clock Puffer, Treiber(4568)
- Clock/Timing-anwendungsspezifische(8652)
- Audio Spezial-Zweck(1564)
Relevanter Hersteller







-
Diskrete Halbleiter-Produkte
Diskrete Halbleiter-Produkte
- Aktuelle Regulierung - Dioden, Transistoren(1090)
- Transistoren-besonderer Zweck(226)
- Transistoren-programmierbare Unijunction(48)
- Transistoren-jfets(1558)
- Transistoren-IGBTs-Einzel(4799)
- Transistoren-IGBTs-Module(63420)
- Transistoren-IGBTs-Arrays(26)
- Transistoren-FETs, MOSFETs-Einzel(48330)
- Transistoren-FETs, MOSFETs-RF(4903)
- Transistoren-FETs, MOSFETs-Arrays(6641)
- Transistoren-Bipolar (BJT)-einzeln, Pre-biased(4539)
- Transistoren-Bipolar (BJT)-Einzel(25800)
- Transistoren-Bipolar (BJT)-RF(2087)
- Transistoren-bipolare (BJT)-Arrays, Pre-biased(2115)
- Transistoren-bipolare (BJT)-Arrays(2310)
- Thyristor-triacs(4044)
- Thyristoren-SCRs-Module(3967)
- Thyristoren-SCRs(5436)
- Thyristoren-diacs, sidacs(319)
- Power Driver Module(1627)
- Dioden-zenerdioden-Einzel(87483)
- Dioden-zenerdioden-Arrays(2619)
- Dioden - variable Kapazität (Varik, Varaktoren)(1200)
- Dioden-RF(2753)
- Dioden-Gleichrichter-Einzel(67528)
- Dioden-Gleichrichter-Arrays(20581)
- Dioden-Brücke-Gleichrichter(11700)
Relevanter Hersteller




-
RF/if und RFID
RF/if und RFID
- SIM -Karten für Abonnenten -Identifikationsmodul (SIM)(77)
- RF -Zirkulatoren und Isolatoren(1742)
- RFID, RF-Zugang, Monitoring-ICS(1550)
- RFID Transponder, Tags(747)
- RFID Lesegeräte(464)
- RFID -Bewertungs- und Entwicklungskits, Boards(30)
- RFID Antennen(329)
- RFI und EMI - Abschirm- und Absorbungsmaterialien(6444)
- HF und EMI-Kontakte, Fingerstock und Dichtungen(7497)
- RF Transmitter(668)
- RF Transceiver Module(6900)
- RF-Transceiver ICS(4169)
- HF-Schalter(9276)
- RF Shields(16401)
- HF-Receiver(1998)
- HF -Empfänger, Sender und Transceiver -Einheiten(2763)
- RF Power Divider/Splitter(1223)
- RF Power Controller ICs(86)
- HF-Modulatoren(710)
- HF-Mixer(2800)
- RF misc ICS und Module(3276)
- HF-Front-End (LNA + PA)(419)
- RF -Bewertungs- und Entwicklungskits, Boards(747)
- HF-gerichtete Kupplung(2718)
- RF Diplexer(1464)
- RF-Detektoren(412)
- RF-Demodulatoren(249)
- HF-Antennen(12319)
- HF-Verstärker(19651)
- Balun(1496)
- Dämpfungsglieder(4852)
Relevanter Hersteller







-
Optoelektronik
Optoelektronik
- Optomechanisch(480)
- Leuchten(125)
- Laserdioden, Lasermodule - Laserlieferung, Laserfasern(345)
- Hene Lasersysteme(31)
- Hene Laserköpfe(27)
- Hintergrundbeleuchtung anzeigen(93)
- Xenon-Beleuchtung(387)
- Touchscreen-Overlays(453)
- Panel Indicators, Pilot Lights(75729)
- Optik-Remote-Phosphor-Lichtquelle(269)
- Optik-Reflektoren(665)
- Optik-leichte Rohre(5384)
- Optik-Objektive(4951)
- LEDs-Spacer, Unentschieden(2718)
- LEDs-Lamp-Ersetzungen(29718)
- LEDs - Leiterplattenindikatoren, Arrays, Lichtstäbe, Balkendiagramme(9083)
- LED-thermische Produkte(667)
- LED-Beleuchtung(64)
- LED-Beleuchtung-weiß(37580)
- LED-Beleuchtung-Farbe(4728)
- LED-Beleuchtung-Maiskolben, Motoren, Module(28735)
- LED-Anzeige-diskret(27601)
- Laserdioden, Module(1553)
- Lampen-Glühlampen, Neons(311004)
- Lampen-Kälte-Fluoreszenz (KKL) & UV(164)
- Wechselrichter(7728)
- Infrarot, UV, sichtbare Strahler(3871)
- Fiber Optics-Transmitter-Antrieb integriert(4085)
- Fiber Optics-Transmitter-diskrete(350)
- Fiber Optics-Transceiver Module(18758)
- Fiberoptik-Switches, Multiplexer, Demultiplexer(1387)
- Fiberoptik-Receiver(695)
- Fiberoptik-Dämpfung(654)
- Elektrolumineszenz(102)
- Display, Monitor-Interface Controller(98)
- Display-Module-Vakuum-Leuchtstofflampen (VFD)(249)
- Module anzeigen-LED Dot Matrix und Cluster(865)
- Display-Module-LED-Zeichen und numerische(5421)
- Display-Module-LCD, OLED, Graphic(4654)
- Display-Module-LCD, OLED-Zeichen und numerische(2202)
- Display-Blenden, Objektive(88)
- Adresse, Spezialität(458)
Relevanter Hersteller







-
Sensoren, Wandler
Sensoren, Wandler
- Ultraschallempfänger, Sender - Industrial(115)
- Temperatursensoren - Thermostate - Mechanisch - Industrielles(3103)
- Temperatursensoren - Analog und digitaler Ausgang - Industrial(209)
- Näherungssensoren - Industrial(13611)
- Drucksensoren, Wandler - Industrie(26503)
- Optische Sensoren - Photonik - Zähler, Detektoren, SPCM (Einzelphotonzählmodul)(751)
- Optische Sensoren - Kameramodule(875)
- Magnetsensoren - Position, Nähe, Geschwindigkeit (Module) - Industrie(554)
- Kraftsensoren - Industrial(346)
- Flusssensoren - Industrielles(151)
- Float, Level Sensoren - Industrial(310)
- Encoder - Industrial(4980)
- Farbsensoren - Industrial(50)
- Berührungssensoren(100)
- Ultraschall-Receiver, Transmitter(2421)
- Temperatursensoren-Thermostat-Solid State(1096)
- Temperatursensoren-Thermostate-mechanisch(3397)
- Temperatursensoren - Thermoelemente, Temperatursonden(1921)
- Temperatursensoren - RTD (Widerstandstemperaturdetektor)(1525)
- Temperatursensoren-PTC-Thermistoren(2273)
- Temperatursensoren-ntc-thermistoren(13259)
- Temperatursensoren-Analog und Digital Output(3928)
- DMS(1399)
- Spezialisierte Sensoren(1861)
- Solarzellen(503)
- Schock-Sensoren(84)
- Sensor-Interface-Junction-Blöcke(2519)
- Sensor-Kabel-Baugruppen(22011)
- Proximity/Belegung Sensoren-fertige Einheiten(725)
- Näherungsschalter(2860)
- Drucksensoren, Wandler(11317)
- Positionssensoren - Winkel, lineare Positionsmessung(6022)
- Optische Sensoren-reflektierende-Logik-Ausgang(194)
- Optische Sensoren - reflektierend - analoge Ausgang(432)
- Optische Sensoren-Phototransistoren(1027)
- Optische Sensoren - Photointerrupter - Schlitztyp - Transistorausgang(1427)
- Optische Sensoren - Photointerrupter - Schlitztyp - Logikausgabe(1215)
- Optische Sensoren-Lichtschranke, Industrial(16763)
- Optische Sensoren-Photodioden(1543)
- Optische Sensoren-Foto-Detektoren-Remote Receiver(2605)
- Optische Sensoren-Foto-Detektoren-Logik-Ausgang(146)
- Optische Sensoren-Foto-Detektoren-CDs-Zellen(74)
- Optische Sensoren-Distanz-Messung(377)
- Optische Sensoren-Ambient Light, IR, UV Sensoren(1305)
- Multifunktions(558)
- Motion Sensors-Vibration(337)
- Motion Sensors-Tilt Schalter(67)
- Bewegungsmelder-optisch(719)
- Motion Sensors-Neigungssensoren(175)
- Motion Sensors-Imus (Trägheit-Maßeinheiten)(416)
- Motion Sensors-Kreisel(214)
- Motion Sensors-Beschleunigungsmesser(1911)
- Magnete-Sensor abgestimmt(119)
- Magnete-Multi Purpose(1965)
- Magnetische Sensoren-Schalter (Solid State)(3700)
- Magnetsensoren - Position, Nähe, Geschwindigkeit (Module)(5199)
- Magnetische Sensoren-linear, Kompass (ICS)(1247)
- Magnetsensoren - Kompass, Magnetfeld (Module)(35)
- LVDT -Wandler (linearer variabler Differentialtransformator)(204)
- IrDA Transceiver-Module(196)
- Bildsensor, Kamera(2235)
- Feuchtigkeit-Sensoren(1425)
- Gas-Sensoren(1217)
- Force Sensoren(188)
- Durchfluss-Sensoren(550)
- Float, Level Sensoren(1343)
- Encoder(6357)
- Staub-Sensoren(43)
- Aktuelle Wandler(3455)
- Color Sensoren(85)
- Verstärker(1905)
Relevanter Hersteller







-
Anschlüsse, Verbindungen
Anschlüsse, Verbindungen
- USB, DVI, HDMI -Stecker(446)
- Festkörperbeleuchtungsstecker(555)
- Steckdosen für ICs, Transistoren(953)
- Steckbare Steckverbinder(1221)
- Photovoltaik (Solarpanel) Anschlüsse(136)
- Glasfaseranschlüsse(370)
- FFC, FPC (flache flexible) Anschlüsse(761)
- D-Sub, D-förmige Stecker(2887)
- Koaxialverbinder (RF)(2389)
- Rundanschlüsse(14162)
- Stromanbeter Blade Type(273)
- Stecker und Behälter(2597)
- USB, DVI, HDMI Stecker-Adapter(572)
- USB, DVI, HDMI -Stecker(4298)
- Klemmen-Wire to Board Steckverbinder(217)
- Klemmen-Draht-Steckverbinder(4322)
- Klemmen-Draht-Pin Stecker(328)
- Terminals-Revolver Steckverbinder(1273)
- Terminals-spezialisierte Steckverbinder(2042)
- Klemmen-Spaten Verbinder(3902)
- Klemmen-Löten/Stecker(345)
- Klemmen-Verschraubungen(745)
- Klemmen-Ring Steckverbinder(12596)
- Klemmen-rechteckige Steckverbinder(4747)
- Terminals - Schnellverbindungen, schnelle Trennungsanschlüsse(8514)
- Klemmen-PC PIN, Single Post Connectors(3776)
- Klemmen-PC-Pin-Buchsen, Sockel-Steckverbinder(5883)
- Klemmen-magnetische Draht-Steckverbinder(1653)
- Klemmen-Messer Steckverbinder(112)
- Klemmen-Gehäuse, Stiefel(2850)
- Klemmen-Folie Steckverbinder(108)
- Klemmen-Barrel, Bullet-Steckverbinder(1107)
- Klemmen-Adapter(137)
- Terminal-Streifen und Revolver-Boards(1159)
- Terminal Junction Systeme(2533)
- Anschlussblöcke-Draht an Bord(43615)
- Terminal Blocks-spezialisierte(3722)
- Terminal Blocks-Power Distribution(847)
- Anschlussblöcke-Panel Mount(1359)
- Terminal Blocks-Interface Module(1819)
- Anschlussblöcke-Kopfzeilen, Stecker und Buchsen(119920)
- Anschlussblöcke-DIN-Schiene, Kanal(9373)
- Anschlussblöcke-Kontakte(65)
- Anschlussblöcke-Barrier Blocks(47517)
- Anschlussblöcke-Adapter(1059)
- Solid State Lighting Verbinder-Kontakte(271)
- Festkörperbeleuchtungsstecker(1344)
- Buchsen für ICS, Transistoren-Adapter(275)
- Steckdosen für ICs, Transistoren(22148)
- Shunts, Jumper(907)
- Rechteckige Verbinder-Feder geladen(7721)
- Rechteckige Steckverbinder-Gehäuse(43023)
- Rechteckige Verbinder-Kopfzeilen, Spezial-PIN(6129)
- Rechteckige Anschlüsse - Header, Gefäße, weibliche Sockel(229601)
- Rechteckige Verbinder-Kopfzeilen, männliche Pins(543338)
- Rechteckige Anschlüsse - kostenloses Hängen, Panelhalterung(30142)
- Rechteckige Verbinder-Kontakte(10681)
- Rechteckige Anschlüsse - Board in, Direktdraht zum Board(2432)
- Rechteckige Verbinder-Adapter(475)
- Rechteckig - Brett zu Board -Steckern - Header, Behälter, weibliche Sockel(9)
- Rechteckig - Brett zu Board -Steckern - Header, männliche Stifte(2)
- Rechteckige Anschlüsse - Board -Abstandshalter, Stacker (Board zu Board)(238901)
- Rechteckige Anschlüsse - Arrays, Kantentyp, Mezzanin (Board zu Board)(37853)
- Stromanschluss-Eingänge, Steckdosen, Module(10310)
- Steckbare Steckverbinder(6049)
- Photovoltaik- (Solarpanel) Anschlüsse - Kontakte(77)
- Photovoltaik (Solarpanel) Anschlüsse(504)
- Modulare Steckverbinder-Verdrahtung Blöcke(99)
- Modulare Steckverbinder-Stecker(1674)
- Modulare Steckverbinder-Stecker Gehäuse(181)
- Modulare Steckverbinder-Buchsen mit magnetischen(10152)
- Modulare Steckverbinder-Buchsen(23416)
- Modulare Steckverbinder-Adapter(855)
- Memory Connectors-PC Cards-Adapter(21)
- Memory Connectors-PC Card Sockets(3299)
- Memory Connectors-Inline Modul Sockets(3390)
- LGH Steckverbinder(764)
- Keystone-Einsätze(2758)
- Keystone-Frontplatte, Frames(1926)
- Heavy Duty Steckverbinder-Einsätze, Module(4190)
- Schwerlastanschlüsse - Gehäuse, Kapuzen, Basen(17226)
- Heavy Duty Steckverbinder-Frames(523)
- Heavy Duty Steckverbinder-Kontakte(1832)
- Heavy Duty Steckverbinder-Baugruppen(671)
- LWL-Steckverbinder-Gehäuse(919)
- Glasfaser-Steckverbinder - Adapter(4455)
- LWL-Steckverbinder(3001)
- FFC, FPC (flache flexible) Steckverbinder - Gehäuse(652)
- FFC, FPC (flache flexible) Anschlüsse - Kontakte(202)
- FFC, FPC (flache flexible) Anschlüsse(18691)
- D-Sub, d-förmige Steckverbinder-Terminatoren(47)
- D-Sub, d-förmige Steckverbinder-Gehäuse(12238)
- D-Sub, d-förmige Steckverbinder-Kontakte(2714)
- D-Sub, D-förmige Steckverbinder-Rückenschalen, Kapuzen(5995)
- D-Sub, d-förmige Steckverbinder-Adapter(1304)
- D-Sub Steckverbinder(141346)
- D-förmige Steckverbinder-Centronics(8770)
- Kontakte, Frühling geladen und Druck(630)
- Kontakte-Multi Purpose(6196)
- Kontakte-"Leadframe"(122)
- Koaxial-Steckverbinder (RF)-Terminatoren(1231)
- Koaxial-Steckverbinder (RF)-Kontakte(480)
- Koaxial-Steckverbinder (RF)-Adapter(6386)
- Koaxialverbinder (RF)(25734)
- Rundsteckverbinder-Gehäuse(441226)
- Rundsteckverbinder-Kontakte(4737)
- Rundsteckverbinder-backschalen und Kabel-Klemmen(53692)
- Rundsteckverbinder-Adapter(8839)
- Rundanschlüsse(1196254)
- Card Edge Steckverbinder-Gehäuse(469)
- Karte Edge Verbinder-edgeboard Verbinder(672683)
- Card Edge Verbinder-Kontakte(325)
- Card Edge Verbinder-Adapter(73)
- Blade Type Power Steckverbinder-Gehäuse(837)
- Blade Type Power Connectors-Kontakte(393)
- Stromanbeter Blade Type(4163)
- Zwischen Serien-Adapter(649)
- Barrel-Stromanschluss(935)
- Barrel-Audio-Anschlüsse(2432)
- Barrel-Audio Adapter(92)
- Banana und Tip Steckverbinder-Buchsen, Stecker(1644)
- Banana and Tip Connectors-Binding Posts(239)
- Banana und Tip Steckverbinder-Adapter(75)
- Backplane Steckverbinder-spezialisiert(45586)
- Backplane Steckverbinder-Gehäuse(6863)
- Backplane Steckverbinder-Hard metrisch, Standard(6297)
- Backplane Steckverbinder-DIN 41612(9408)
- Backplane Steckverbinder-Kontakte(3583)
- Backplane Connectors-ARINC Einsätze(2357)
- Backplane Steckverbinder-ARINC(3789)
Relevanter Hersteller







-
Widerstände
-
Kondensatoren
Kondensatoren
- Aluminium-Elektrolytkondensatoren(16817)
- Trimmer, Variable Kondensatoren(3151)
- Dünne Folien-Kondensatoren(3473)
- Tantal-Kondensatoren(136103)
- Tantal-Polymer-Kondensatoren(9778)
- Silizium-Kondensatoren(320)
- Niob Oxide Kondensatoren(330)
- Mica und PTFE Kondensatoren(9101)
- Folien-Kondensatoren(150406)
- Elektrische Doppelschichtkondensatoren (EDLC), Superkondensatoren(2782)
- Keramische Kondensatoren(833829)
- Kondensatoren-Netzwerke, Arrays(2383)
- Aluminium-Elektrolytkondensatoren(125325)
- Aluminium-Polymer-Kondensatoren(7544)
Relevanter Hersteller






-
Transformatoren
Transformatoren
Relevanter Hersteller







-
Isolatoren
-
Kristalle, Oszillatoren, Resonatoren
Kristalle, Oszillatoren, Resonatoren
Relevanter Hersteller






-
Switches
Switches
- Verriegelungsschalter(2893)
- Emergency-Stop-Schalter (E-Stop)(1160)
- Kabelzugschalter(571)
- Toggle-Schalter(33608)
- Rändelrads Schalter(742)
- Schalter(14263)
- Snap-Aktion, Endschalter begrenzen(28077)
- Slide-Schalter(5166)
- Selector-Schalter(9720)
- Rotary Switches(13850)
- Rocker Schalter(53790)
- Drucktaste-Schalter-Hall-Effekt(127)
- Drucktaste Schalter(190826)
- Programmierbare Display-Switches(39)
- Navigations-Schalter, Joystick(1882)
- Magnetische, Reed-Schalter(1399)
- Keypad-Schalter(637)
- Keylock Schalter(3684)
- DIP Schalter(7747)
- Konfigurierbare Switch-Komponenten-Objektiv(1435)
- Konfigurierbare Schalter-Komponenten-Lichtquelle(1236)
- Konfigurierbare Switch-Komponenten-Contact Block(1401)
- Konfigurierbare Switch-Komponenten-Body(16077)
- Disconnect-Switch-Komponenten(2567)
Relevanter Hersteller






-
Relais
Relais
- Sicherheitsrelais(1310)
- Reedrelais(1735)
- Hochfrequenz (RF) -Relais(1190)
- Schütze (Festkörper)(686)
- Schütze (elektromechanisch)(11952)
- Kfz-Relais(1881)
- Solid State Relais(10652)
- Signal-Relais, bis zu 2 Ampere(9149)
- Relay-Sockets(2075)
- Power Relays, über 2 Ampere(31604)
- E / A-Relaismodule(712)
- I/o-Relay-Module-Input(2)
- I/o-Relay-Modul-Racks(247)
Relevanter Hersteller
















Sprache auswählen
Aktuelle Sprache
Deutsch
- English
- Deutsch
- Italia
- Français
- 日本語
- 한국의
- русский
- Svenska
- Nederland
- español
- Português
- polski
- Suomi
- Gaeilge
- Slovenská
- Slovenija
- Čeština
- Melayu
- Magyarország
- Hrvatska
- Dansk
- românesc
- Indonesia
- Ελλάδα
- Български език
- Afrikaans
- IsiXhosa
- isiZulu
- lietuvių
- Maori
- Kongeriket
- Монголулс
- O'zbek
- Tiếng Việt
- हिंदी
- اردو
- Kurdî
- Català
- Bosna
- Euskera
- العربية
- فارسی
- Corsa
- Chicheŵa
- עִבְרִית
- Latviešu
- Hausa
- Беларусь
- አማርኛ
- Republika e Shqipërisë
- Eesti Vabariik
- íslenska
- မြန်မာ
- Македонски
- Lëtzebuergesch
- საქართველო
- Cambodia
- Pilipino
- Azərbaycan
- ພາສາລາວ
- বাংলা ভাষার
- پښتو
- malaɡasʲ
- Кыргыз тили
- Ayiti
- Қазақша
- Samoa
- සිංහල
- ภาษาไทย
- Україна
- Kiswahili
- Cрпски
- Galego
- नेपाली
- Sesotho
- Тоҷикӣ
- Türk dili
- ગુજરાતી
- ಕನ್ನಡkannaḍa
- मराठी
Anleitung zum Ultraschallsensor HC-SR04: Funktionsweise und Verwendung
Zeit: 2026/01/14
Durchsuchen: 1,364
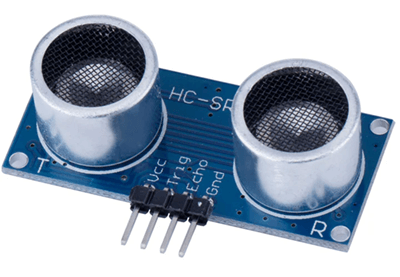
Der Ultraschallsensor HC-SR04

HC-SR04
UNIVERSAL-SOLDER Electronics Ltd
Ultrasonic Distance Measuring Se
In Stock: 27900 pcs
ist ein Abstandsmessmodul in der Elektronik, das für seine Einfachheit, Erschwinglichkeit und zuverlässige Leistung bekannt ist.In diesem Artikel wird der Ultraschallsensor HC-SR04 im Detail besprochen, einschließlich seines Funktionsprinzips, seiner Verwendung, Pinbelegung, Spezifikationen und mehr.
Katalog
Was ist der Ultraschallsensor HC-SR04?
Die HC-SR04
HC-SR04
UNIVERSAL-SOLDER Electronics Ltd
Ultrasonic Distance Measuring Se
In Stock: 27900 pcs
Der Ultraschallsensor ist ein kostengünstiges Entfernungsmessmodul, das Ultraschallwellen verwendet, um Objekte ohne physischen Kontakt zu erkennen.Es sendet einen kurzen Ultraschallimpuls und misst die Zeit, die das Echo benötigt, um zurückzukehren. Dies ermöglicht eine genaue Entfernungsberechnung auch in dunklen oder staubigen Umgebungen.
Dieses Modul arbeitet normalerweise mit 5 V und verfügt über vier Pins: VCC, Trig, Echo und GND, wodurch es einfach an Mikrocontroller wie Arduino und ähnliche Entwicklungsplatinen angeschlossen werden kann.Mit einem Messbereich von etwa 2 cm bis 400 cm und stabiler Leistung wird es häufig in der Robotik, Hindernisvermeidung, Füllstandmessung und grundlegenden Automatisierungsprojekten eingesetzt.
Wenn Sie am Kauf des Ultraschallsensors HC-SR04 interessiert sind, kontaktieren Sie uns bitte bezüglich Preis und Verfügbarkeit.
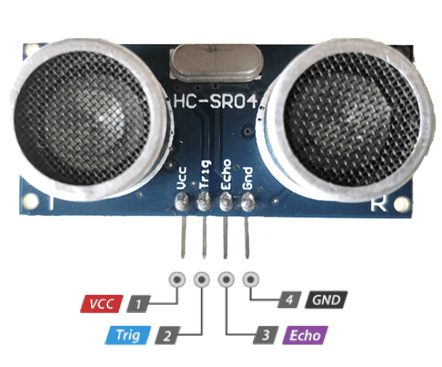
Details zur Pinbelegung des Ultraschallsensors HC-SR04
|
Pin
Nummer |
Pin
Name |
Beschreibung |
|
1 |
VCC |
Liefert Strom
zum Modul.Für den ordnungsgemäßen Betrieb ist normalerweise ein 5-V-Gleichstromeingang erforderlich. |
|
2 |
Trig |
Triggereingang
Stift.Ein vom Mikrocontroller gesendeter kurzer HIGH-Impuls (normalerweise 10 µs) startet
die Ultraschall-Abstandsmessung. |
|
3 |
Echo |
Geben Sie den Pin aus
sendet einen Impuls zurück an die Steuerung.Die Impulsbreite repräsentiert die Zeit
wird für die Rückkehr der Ultraschallwelle benötigt, die zur Berechnung der Entfernung verwendet wird. |
|
4 |
GND |
Erdungsstift.
Wird mit der Masse des Netzteils oder Mikrocontrollers verbunden. |
Alternativen und gleichwertiges Modell
|
Sensor
Modell |
Sensor
Typ |
Typisch
Reichweite |
Notizen |
|
JSN-SR04T |
Ultraschall
(Wasserdicht) |
20 cm – 600 cm |
Wasserdicht
Sonde, geeignet für die Außen- oder Flüssigkeitsstandmessung |
|
HY-SRF05 |
Ultraschall |
2 cm – 450 cm |
Verbesserte Version
von HC-SR04
|
|
Parallaxe PING))) |
Ultraschall |
2 cm – 300 cm |
Hochwertig
Ultraschallsensor, Single-Pin-Steuerung |
|
URM37 |
Ultraschall |
4 cm – 500 cm |
Industrietauglich
Ultraschallmodul mit seriellem Ausgang |
Scharf
GP2Y0A21YK0F
 |
IR-Analog
Abstandssensor |
10 cm – 80 cm |
Analoger Ausgang,
gut für den Innenbereich mit kurzer Reichweite |
Scharf
GP2Y0A02YK0F
 |
IR-Analog
Abstandssensor |
20 cm – 150 cm |
IR mit größerer Reichweite
Entfernungsmessung |
VL53L0X
 |
Flugzeit
(Laser) |
Bis 200 cm |
Hochpräzise
digitaler Abstandssensor (I²C) |
|
E18-D80NK |
IR-Nähe
Sensor |
3 cm – 80 cm |
Einstellbar
Digitaler Ausgang, einfache Hinderniserkennung |
Technische Daten des HC-SR04
|
Parameter |
Spezifikation |
|
Produktmodell |
HC-SR04
|
|
Sensortyp |
Ultraschall
Entfernungsmessmodul |
|
Betrieb
Spannung |
5 V Gleichstrom |
|
Betrieb
Aktuell |
< 15 mA |
|
Ultraschall
Häufigkeit |
40 kHz |
|
Triggerimpuls
Breite |
≥ 10 µs |
|
Echosignal |
TTL-Impulsausgang
(5 V) |
|
Messen
Entfernung (theoretisch) |
2 cm – 400 cm |
|
Messen
Entfernung (praktisch) |
2 cm – 80 cm |
|
Entfernung
Auflösung |
~3mm |
|
Winkel messen |
< 15° |
|
Schnittstellentyp |
Digital (Trig
& Echo-Pins) |
|
Reaktionszeit |
~60 ms |
|
Genauigkeit |
±3 mm |
|
Betrieb
Temperatur |
0 °C bis +70 °C |
|
Lagerung
Temperatur |
−40 °C bis +85 °C |
|
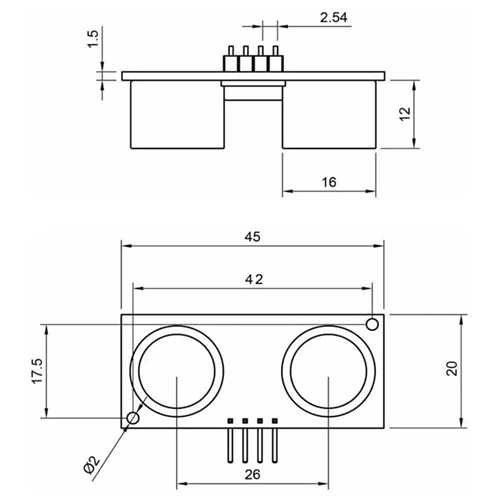
PCB-Abmessungen |
~45 × 20 × 15 mm |
|
Befestigungslöcher |
Ja (2 Löcher) |
|
Gewicht |
~9 g |
|
Kompatibilität |
Arduino,
ESP8266, ESP32, STM32, Raspberry Pi (mit Level-Shifting) |
Merkmale und Vorteile
• Berührungslose Ultraschall-Abstandsmessung
• Betrieb mit 5 V DC
• Messbereich von 2 cm bis 400 cm
• Hohe Distanzauflösung (~3 mm)
• Enger Messwinkel (<15°)
• Verwendet eine Ultraschallfrequenz von 40 kHz
• Einfache 4-Pin-Schnittstelle (VCC, Trig, Echo, GND)
• Digitaler TTL-Impulsausgang
• Einfache Integration mit Mikrocontrollern
• Kompaktes und leichtes Modul
• Genaue Distanzmessung zu geringen Kosten
• Funktioniert zuverlässig in Umgebungen mit wenig Licht oder Dunkelheit
• Kein physischer Kontakt, wodurch Verschleiß und Schäden reduziert werden
• Einfache Verkabelung und Steuerlogik
• Umfangreich unterstützt mit Bibliotheken und Beispielen
• Geeignet für Einsteiger und Bildungsprojekte
• Geringer Stromverbrauch
• Leicht austauschbar und überall verfügbar
• Für den Grundgebrauch ist nur eine minimale Kalibrierung erforderlich
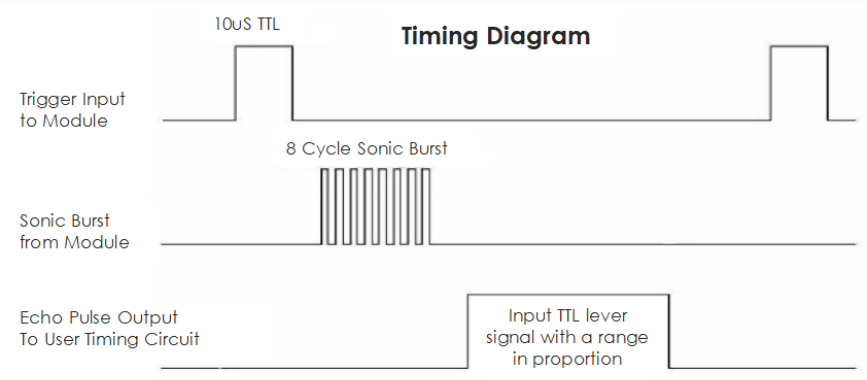
HC-SR04 Timing-Diagramm
Das Zeitdiagramm des Ultraschallsensors HC-SR04
HC-SR04
UNIVERSAL-SOLDER Electronics Ltd
Ultrasonic Distance Measuring Se
In Stock: 27900 pcs
zeigt die genaue Abfolge der Signale, die zur Durchführung einer Abstandsmessung verwendet werden.Der Prozess beginnt, wenn der Mikrocontroller einen kurzen HIGH-Impuls, typischerweise 10 Mikrosekunden, an den Trig-Pin sendet.Dieses Auslösesignal weist den Sensor an, einen neuen Entfernungsmesszyklus zu starten, und bereitet die internen Schaltkreise auf die Übertragung von Ultraschallwellen vor.
Nach Empfang des Triggerimpulses erzeugt der Sensor einen Ultraschallimpuls, der aus mehreren Zyklen mit einer Frequenz von etwa 40 kHz besteht.Diese Schallwellen werden vom Sender ausgesendet und wandern durch die Luft auf das Zielobjekt zu.Während dieser Zeit wartet der Sensor auf die Rückkehr des reflektierten Schalls und gibt noch kein Entfernungssignal aus.
Sobald die Ultraschallwellen auf ein Objekt treffen und zurückprallen, erkennt der Sensor das Echo und setzt den Echo-Pin auf HIGH.Die Dauer dieses HIGH-Impulses stellt die Gesamtzeit dar, die der Schall benötigt, um vom Sensor zum Objekt und wieder zurück zu gelangen.Je weiter das Objekt entfernt ist, desto länger bleibt der Echoimpuls HIGH.
Durch die Messung der Breite des Echoimpulses kann der Mikrocontroller anhand der bekannten Schallgeschwindigkeit die Entfernung berechnen.Eine kurze Verzögerung zwischen den Messungen wird empfohlen, um Signalüberlappungen zu vermeiden und stabile, genaue Messwerte zu gewährleisten.
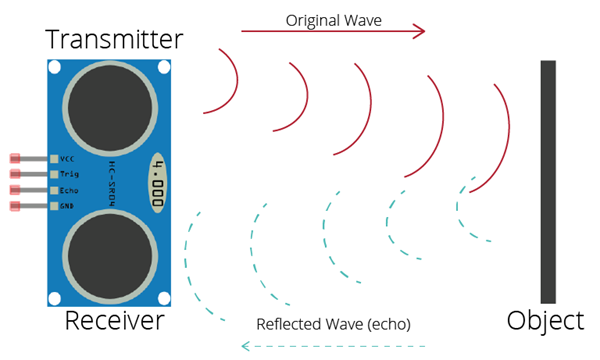
Arbeitsbetrieb und Nutzung
Der Ultraschallsensor HC-SR04
HC-SR04
UNIVERSAL-SOLDER Electronics Ltd
Ultrasonic Distance Measuring Se
In Stock: 27900 pcs
misst Entfernungen durch Senden und Empfangen von Ultraschallwellen.Wenn ein Mikrocontroller einen kurzen Impuls an den Trig-Pin sendet, aktiviert der Sensor seinen Sender und sendet einen kurzen Ultraschallstoß mit etwa 40 kHz aus.Diese Schallwellen wandern durch die Luft, bis sie auf ein Objekt treffen und dort zurück zum Sensor reflektiert werden.
Die zurückkehrenden Schallwellen werden vom Empfänger des Sensors über den Echo-Pin erfasst.Der Sensor gibt dann ein Signal aus, dessen Dauer die Gesamtzeit darstellt, die der Schall benötigt, um zum Objekt zu gelangen und zurückzukehren.Da die Schallgeschwindigkeit in der Luft bekannt ist, kann der Mikrocontroller die Entfernung berechnen, indem er diesen Zeitwert verarbeitet und ihn durch zwei dividiert, um den Hin- und Rückweg zu berücksichtigen.
Um den HC-SR04 zu verwenden, stellen Sie eine stabile 5-V-Stromquelle bereit und verbinden Sie die Trig- und Echo-Pins mit den digitalen I/O-Pins am Mikrocontroller.Durch wiederholtes Senden von Triggerimpulsen und Messen der Echoantwort in der Software kann der Sensor kontinuierliche und zuverlässige Entfernungsmessungen für Echtzeitanwendungen liefern.
HC-SR04 Ultraschallsensoranwendungen
• Hinderniserkennung und -vermeidung bei Robotern
• Entfernungsmessung in Heimwerker- und Bildungsprojekten
• Objekterkennung in Automatisierungssystemen
• Wasser- oder Flüssigkeitsstandüberwachung (berührungslos)
• Prototypen für Einparkhilfe und Annäherungssensorik
• Intelligente Mülleimer und automatisches Deckelsystem
• Sicherheits- und Einbruchserkennungs-Setups
• Industrielle Positions- und Abstandsmessung
• Interaktive Elektronik- und IoT-Projekte
• Bewegungsbasierte Auslösesysteme
Vergleich zwischen HC-SR04 und HY-SRF05
|
Spezifikation |
HC-SR04
|
HY-SRF05 |
|
Sensortyp |
Ultraschall
Abstandssensor |
Ultraschall
Abstandssensor |
|
Betrieb
Spannung |
5 V Gleichstrom |
5 V Gleichstrom |
|
Betrieb
Aktuell |
<15 mA |
<15 mA |
|
Ultraschall
Häufigkeit |
≈40 kHz |
≈40 kHz |
|
Messbereich |
2 cm – 400 cm |
2 cm – 450 cm |
|
Praktische Reichweite |
2 cm – 80 cm
(stabiler) |
Erweiterter Stall
Bereich |
|
Entfernung
Auflösung |
~3mm |
~3mm |
|
Winkel messen |
<15° |
<15° |
|
Pins / Schnittstelle |
4-polig (VCC,
Trig, Echo, GND) |
4-polig (VCC,
Trig, Echo, GND) |
|
Triggereingang |
10 µs Impuls |
10 µs Impuls |
|
Echo-Ausgabe |
TTL-Impuls |
TTL-Impuls |
|
Reaktionszeit |
~60 ms |
~60 ms |
|
Temperatur
Reichweite |
0 °C – +70 °C |
0 °C – +70 °C |
|
Abmessungen |
~45 × 20 × 15 mm |
~45 × 20 × 15 mm |
|
Gewicht |
~9 g |
~9 g |
|
Kompatibilität |
Arduino, ESP32,
Raspberry Pi |
Arduino, ESP32,
Raspberry Pi |
|
Besondere Hinweise |
Am häufigsten verwendet
Einsteigermodul |
Verbesserte Reichweite,
höhere Echozuverlässigkeit
|
|
Am besten für |
Budgetprojekte,
Bildung |
Projekte
erfordern einen größeren Erfassungsbereich |
Mechanische Abmessungen
Fazit
Das einfache Funktionsprinzip, das klare Zeitverhalten und die einfache Integration mit Mikrocontrollern machen den Ultraschallsensor HC-SR04
HC-SR04
UNIVERSAL-SOLDER Electronics Ltd
Ultrasonic Distance Measuring Se
In Stock: 27900 pcs
zu einer zuverlässigen Wahl für Hinderniserkennung, Füllstandmessung und Automatisierungssysteme.Wenn Sie seine Funktionen, technischen Spezifikationen, seine Funktionsweise und seinen Vergleich mit ähnlichen Sensoren wie dem HY-SRF05 verstehen, können Sie den HC-SR04 sicher für Ihre spezifischen Anforderungen auswählen und einsetzen.
Datenblatt PDF
HC-SR04 Datenblatt:
Häufig gestellte Fragen [FAQ]
1. Kann der Ultraschallsensor HC-SR04 im Freien eingesetzt werden?
Der HC-SR04 ist hauptsächlich für den Innenbereich konzipiert.Die Leistung im Freien kann durch Regen, Wind, Temperaturschwankungen und Feuchtigkeit beeinträchtigt werden.
2. Funktioniert der HC-SR04 mit ESP32- oder ESP8266-Boards?
Ja, aber ein Spannungsteiler oder Pegelumsetzer ist erforderlich, da der Echo-Pin 5 V ausgibt, was 3,3-V-Mikrocontroller beschädigen kann.
3. Was beeinflusst die Genauigkeit des HC-SR04-Sensors?
Die Genauigkeit kann durch Objektform, Oberflächenbeschaffenheit, Winkel, Temperatur und Umgebungsgeräusche beeinträchtigt werden.
4. Kann der HC-SR04 weiche oder eckige Objekte erkennen?
Weiche Materialien und schräge Oberflächen können Schallwellen absorbieren oder ablenken und so die Erkennungssicherheit verringern.
5. Wie oft kann der HC-SR04 Entfernungsmessungen durchführen?
Es wird empfohlen, zwischen den Messungen mindestens 60 ms zu warten, um Echostörungen zu vermeiden.
6. Warum gibt der HC-SR04 manchmal Null oder falsche Messwerte zurück?
Dies geschieht normalerweise aufgrund von Signalüberlappungen, falscher Verkabelung, instabiler Stromversorgung oder Objekten außerhalb der effektiven Reichweite.
7. Können mehrere HC-SR04-Sensoren zusammen verwendet werden?
Ja, aber sie sollten einzeln ausgelöst werden, um Störungen des Ultraschallsignals zu vermeiden.
Verwandter Artikel
-
![Grundlagen des Pulssensors: Struktur, Funktionsprinzip und Verwendung]() Jan 14 2026Grundlagen des Pulssensors: Struktur, Funktionsprinzip und Verwendung
Jan 14 2026Grundlagen des Pulssensors: Struktur, Funktionsprinzip und VerwendungDie Überwachung der Herzfrequenz ist ein wichtiger Teil des Verständnisses der grundlegenden menschlichen Physiologie, und Pulssensoren bieten eine ... -
![Spannungssensormodul 0–25 V Pinbelegung, funktionsfähig und Arduino-Anschluss]() Jan 14 2026Spannungssensormodul 0–25 V Pinbelegung, funktionsfähig und Arduino-Anschluss
Jan 14 2026Spannungssensormodul 0–25 V Pinbelegung, funktionsfähig und Arduino-AnschlussDas Spannungssensormodul skaliert Gleichspannungen sicher herunter und wandelt sie in lesbare analoge Signale um.In diesem Artikel werden die Pinbeleg...


Verwandte -Produkte

CL02C2R7BO2GNNC
CAP CER 2.7PF 16V C0G/NP0 01005
C0402C0G1C510G
CAP CER 51PF 16V C0G 01005

C2012X7S0G226M125AC
CAP CER 22UF 4V X7S 0805

GQM1555C2D100GB01D
CAP CER 10PF 200V NP0 0402

XC4010XL-1PQ208C
IC FPGA 160 I/O 208QFP

LTC2855IGN#PBF
IC TRANSCEIVER FULL 1/1 16SSOP

TH50VPF5782BASB
TH50VPF5782BASB TOSHIBA

AAT1160-T4-T
AAT1160-T4-T AAT

ZNBG2312
ZNBG2312 ZETEX

IIS2MDCTR
SENSOR MR I2C/SPI 12LGA

IDT72V8980JG

RC28F128P33T85
MICRON BGA64

VI-26L-IU/S
VICOR New
Relevanzprodukte

GP2Y0A02YK0F
SENSOR DIST MEASUR 150CM ANLG
vorrätig: 1909
GP2Y0A21YK0F
SENSOR OPTICAL 10-80CM ANALOG
vorrätig: 743
HC-SR04
Ultrasonic Distance Measuring Se
vorrätig: 1279
GP2Y0A02YK0F
SENSOR OPTICAL 20-150CM ANALOG
vorrätig: 1475
VL53L0X
vorrätig: 1409